Изобретемие относится к сельскохозяйст векному машиностроению, в частности к почвообрабатывающим орудиям, рабочие органы которых работают в режиме автоматически настраивающейся в зависимости от сопротивления почвы вибрации.
Цель изобретения -- упрои ение эксплуатации.
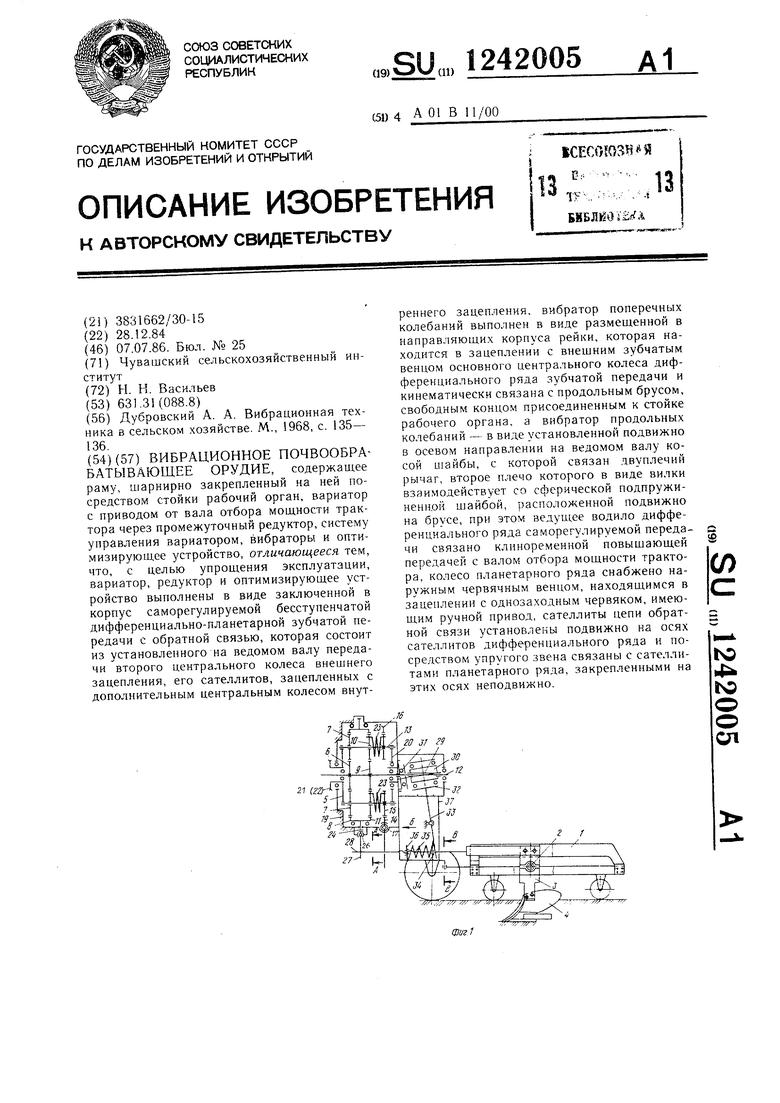
На фиг. 1 показано предлагаемое орудие, общий вид; на фиг. 2 - разрез А- -А па фг. 1; на фиг. 3 - нид Б на фиг. ; на фиг. 4 - разрез В-В на фиг. .
Орудие содержит раму , закрепленную на ней посредством щарнира 2 стойку 3 рабочего opraiia 4, дифференциальный ряд зуб - чатой передачи, составленный из ведупгего води;1а 5, ведомого центрального солнеч- пого колеса б внешнего зацепления, сател- .литов 1, центрального колеса 8 внутреннего зацепления, цепь обратной связи, сост.:. iuvio из второго центрального колеса 9 Bficiu- него зацепления, сателлитов 0 -А допо.икч- центрального колеса 1 BFiyipe; - uri o зацепления.
11е;1тральные колеса 6 и 9 закреп,пены жчодвижно на ведомом валу 12, а сател- .ли :Ъ1 7 и iOO по.авиж1 о isa осях 13.
Планетарный ряд зубча гой передачи об- рлзовак неподвижным колесом 14 с внут- )оиким зацеп.мекием и сате;1литами 15, зн- илн.мгленными пе; одвиж1и: на осях 13. Колесо 14 имеет апужный червя пь й векец 6, .зацепл : 15 1ый с однозаходпьзШ червяком i7, |-;м; ю:цим ручной { оивод 8. Поскольку чер вяк 1 од Озахо;:.рь;й. колесо 14 засто1 Ор(. - :.. :. лориусе 19. CRonoji.oe 20 СЛУЖИТ н ки;ой огюпой осей 13.
ной передачей 21 -- с В ОМ трактора.
(ателлит 1 10 и 5 подвижно связа.чы упругими зве 1ьями 23, в качестве KOI-O- рых могут служить цилиндрические пружины К чения или топснонные ва.лы.
2
BOHLM; 4, который находится в зацепле- нчи с лейкой 2В вибратора поперечных колебаний, размеп1. в направляющих 26 кооиуса 19. Рейка 25 пос1)едством 2 в виде вилки г.одвижно соединена с концом про. 1оль;;ого бруса 28, нрикрс1 ле 1ио о
И;; ведомом валу ;2 яодвижно -л осевом чаиравлении на funofiKe 29 или на н:лица.к устарювлена косая шайба 30 вибратора )o- .iO.ibHbix колебаний, на которой закреплено o u-io мз колец . порного подшипника 31. а ч)- ро ;сол1зцо которого закреплено на корпусе 19. Иа шайбе 30 посре.л.ством ступицы 32 vc- . а1-:овлсн двуллечий 33, опираючл.ийся ,1П-,1м концом в виде вилки на сфери- чес.кую гиайбу 34. Последняя ао;Т.виж1-:о у.- тановлеиа па брусе 28 и поджата пружиной i-i5. к)джатие пружины 35 в зависимости от тягового сопоотивления почвооб
рабать вак1П1,его орудия регулируется гайкой 36.
Корпус 19 закреплен на остове 37 трактора.
Орудие раб отает следуюгцим образо.м.
Крутящий момент от ВОМ трактора кли- ноременным мультипликатором 22 передается водилу 5, а затем через оси 13. сателлиты 7 но двум направлениям: ведомому валу 12 через центральное колесо б и це ;трально- му колесу 8. Передаточ1юе число мультипликатора выбирается в пределах 0,4- 0,2. В этом случае с учетом передаточных чисел от водила 5 до колес 8 и 6 частота вра1цепия водила 5 соответствует становив- П1ейся средней величине за один диапазон частоты вибраций вьпнужденкых колеба5
, л(;л,но., i:o ходу трактора налп:; в,1е}п;ях. В : авчскмост1: (5Т Biyjui гк)чв п6рабгггь;ваю1цего О1м/ ди и тица У1рои:зводимых работ иредвари- телЕзНо гребуемь Й д.чапазои ;,, Л чястя г. и () pail и и выиужде} ных колебаний уст а на в- , ;Иваетсл v. г оисречпом , pyMisbiM 18, в - Одо/:ьном наррг B.: i:i:vui -- регул1-1роьоч11ой гайкой 36.
Колебания в нопе|)е,ых .:1еииях брус 28 с рабочим opra;-iOM 4 Ч.1.1учает от во.чила 5 через чолесо 8, наружный велец 2-. рейку 25 и рычаг 27, а в 11родольпых на- i р:;::, - от иодила 5 через ве/юмь.й В.1 12, кс: С ю 30, : 2, , :,ьу;|.лечий г-АЧаГ 33, сбормческу-о (лыйбу 4 чруж::м, 35 и /айку 3t:. Поиск 0 ;тирг:;л } cperv:ci i;oi 0 McrviciiTa, состав,. K HiibiM из ::а Ч л::итов U) и h и сБ ;;;Ы :.а Г;П;их ;:х . пр-.ткх зиеньез 2.,i. Кроме гснерат())а са;.-:орег .ли- руемаи .ача имеет В з1:|р;--литсли, |,ечи зающ|;е ее динамическую несимметричность 3 целях пе)еаачи крутя1пе; О го чепи обратной сзяи ли ль а наирав. ;е- колеса ). Роль вы1 :;ямкте.:1Я перелачи пьпюлияет меподви/кнос ко, ич;о 1ч, восприни- M,,ce опорный или ги зктквчий момент в п.анетарном .
1 егп еме - нь;м слонием самог ег -лир(дза - Л-:я скстемь является ч О оча должна г исть силовую cbvHKHHiO, частные произ-юд- лле которой по обобшешп-лу чооодинатам ма. 1ы по cpaBf ejiHK) с передаваемыми мо- 1ч(;птамк. Зто )fiHe выполняется следую- : 1ИМ образом. Снобод1-ый -.чемент саморегу- /:ируемой л,;1фферени,ияльной передачи, а именье; Konct) 8. имеет (еобходим чо постоянную си С Э13ЛЯЮ1иуЮ УГЛОЗОЙ СКОООСЛЧ-, ПрОro; n,nciHaj bi-iVir:: ч-лов(;й зедомого ко,еса fi. ч чсоемечнук) сосТаКЛЯ О:г.ю, иро- i (;иа. ;;лг, ю .д-ловой скорости вед чцего ноун.па 5. I остопччая составляюч1ая обеспечивается 40 первой ветви зепч обрат- пой связг. вк;11очаюи1{4 второе 1е ;тталы- ое нгмесо 9, сател.п.ггь; Ki и колесо 8, а переменная .:осга 3.:якчпу:;: чо второй , состав.:ieH4ofi из осей 3. сателлитов 15,
упругих звеньев 23, сателлитов 7 и колеса 11. Основной момент по цепи обратной связи передается по первой ветви, а по второй регулируемой ветви лишь момент, развиваемый одним отдельным упругим звеном 23.
Когда через брус 28, пружину 35, двуплечий рычаг 33, ступицу 32 и косую шайбу 30 тяговое сопротивление орудия вызывает появление на ведомом валу 12 полезной нагрузки, соовтетствующей средней за диапазон частоте вибраций, когда момент, развиваемый всеми упругими звеньями 23, находящимися в предварительно закрученном состоянии, устанавливается достаточным для динамического равновесия системы. Этот момент, передаваемый через колесо 11, складывается на сателлитах 7 с крутящим постоянным моментом на ведущем во- диле 5 и обеспечивает преодоление определенного момента сил полезного сопротивления на центральном колесе 6 или на ведомом валу 12. В этом случае упругие звенья 23 не подвергаются дополнительному закручиванию или раскручиванию, сохраняют свое первоначальное закрученное состояние, а сама передача представляет собой один njiaiieTapHbm механизм Джемса при неподвижных колесах 8 и 14.
Когда при увеличении тягового сопро- ти зления нагрузка на ведомом валу 12 повышается, пружина 35, служащая силовым датчиком, сжимается на больщую величину и, воздействуя через двуплечий рычаг 33 на косую шайбу 30, оказывает большее сопротивление вращению вала 12. В этом случае из-за умемьщения скорости вращения ведомого вала 12 нарушается динамическое равновесие системы, выражающееся в изменении взаимного относительного расположения сателлитов 10 и 15. Это приводит к различным скоростям мест защемления концов упругих звеньев 23, к дополнительному их закручиванию и раскручиванию их обратно до предварительно закрученного состояния.
/1-Л
10
15
20
25
30
35
6
Когда уменьшается тяговое сопротивление, пружина 35 сжимается па меньшую величину, что является причиной повышения скорости колеса 6. При этом колесо 8 вращается в противоположную (по сравнению со вторым случаем) сторону, а взаимное относительное расположение сате,г1литов 10 и 15 изменяется так; что происходит .раскручивание упругих элементов 23 и закручивание их обратно до предварительно закрученного состояния. При этом общий момент, развиваемый упругими элементами 23, уменьшает крутящий момент на ведомом колесе 6 вплоть до установления нового динамического равновесия.
Продолжительность переходного режима между установившимися значениями динамических рав1 овесий. т.е. время изменения направ.тен.ия BpaincHiiH колеса 8. определяет частоту, а перемещения за это время рабочего органа под воздействием приведенных переменных моментов или сил, - амплитуду вибрации в поперечном и продольном направлениях. Эта продолжительность автоматически регистрируется в зависимости от изменения ве. тягового сопротивления почвообрабатываюнхего орудия. Так осуществляется автоматическое настраивание вибраций на оптимальный режим в пределах одного диапазона.
Кроме того, - предлагаемом орудии используются полезно активно-реактивные си- ль вибраций рабочего органа для увеличения тягово ; С1 лы трактора путем подталкивания его остова 37 импульспо вперед по ходу. Это обусловлено тем, что мощность, снимаемая с ВОМ. затрачивается не только на вибрацию рабочего органа, но и на периодическое сжатие пружины 35, которая воздействует при этом на корпус 19 и через него на остов трактора.
Привод орудия в колебания в пре.дла- гасмом устройстве осуществляется от ВОМ трактора, при этом не привлекаются дополнительные виды энергонос11телей (гидравлический, пневматический и электрический.
b
-&
О
--.
1 О
О
777
J о
777
I /
7 18 фиг.З
фиг4
Составитель л. Киселева
Редактор К. ШишкинаТехред И. ВерееКорректор .. .Макенмншинеи
Заказ 3629/1Тираж 679llo;tnncHoe
ВНИИПИ Государственного комитета СССР
по -делам изобретений и открытий
113035, Москва, Ж-35, PayujcxaH наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Бортовой редуктор колесного крутосклонного трактора | 1984 |
|
SU1232515A1 |
| МЕХАНИЧЕСКАЯ АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 1993 |
|
RU2083385C1 |
| Садовый почвообрабатывающий агрегат | 1986 |
|
SU1380636A1 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 1995 |
|
RU2086082C1 |
| Кормораздатчик | 1985 |
|
SU1386121A1 |
| Цилиндрический самоблокирующийся дифференциал | 1984 |
|
SU1194717A1 |
| "Способ стабилизации направления движения машинно-тракторного агрегата по методу "Инерционный парус" | 1988 |
|
SU1645180A1 |
| Почвообрабатывающее орудие | 1990 |
|
SU1792235A3 |
| Фрикционный вариатор | 1979 |
|
SU848815A1 |
| Инерционный трансформатор | 1991 |
|
SU1825927A1 |
| Дубровский А | |||
| А | |||
| Вибрационная техника в сельском хозяйстве | |||
| М., 1968, с | |||
| Способ обделки поверхностей приборов отопления с целью увеличения теплоотдачи | 1919 |
|
SU135A1 |
