w
Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство повышенной проходимости | 1989 |
|
SU1676835A1 |
| Способ стабилизации направления движения машинно-тракторного агрегата и устройство для стабилизации направления движения машинно-тракторного агрегата | 1990 |
|
SU1750450A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРИВОДА КОЛЕС ИЛИ МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2520224C1 |
| Ведущий мост транспортного средства | 1988 |
|
SU1586928A1 |
| ДИФФЕРЕНЦИАЛ БЛОКИРУЕМЫЙ | 2008 |
|
RU2407933C2 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| ДВУХПОТОЧНЫЙ ВЕДУЩИЙ МОСТ | 2008 |
|
RU2385432C1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
Изобретение относится к тракторному и сельскохозяйственному машиностроению, а именно к конструкциям тракторов с высокой степенью стабилизации направления движения. Цель изобретения - повышение курсовой устойчивости агрегата. Цель достигается введением перечня технологических операций, последовательность выполнения которых позволяет в момент появления рассогласования угловых скоростей движителей увеличить момент инерции полуоси движителя, имеющего меньшую частоту вращения, путем раскручивания на ней технологических грузов крутящим моментом двигателя трактора, не превышающим момента на движителе, имеющем большую частоту вращения, и ограниченным величиной касательной силы тяги по условиям сцепления на этом движителе. 1 ил.
Изобретение относится к тракторному и сельскохозяйственному машиностроению.
Цель изобретения - повышение курсовой устойчивости агрегата.
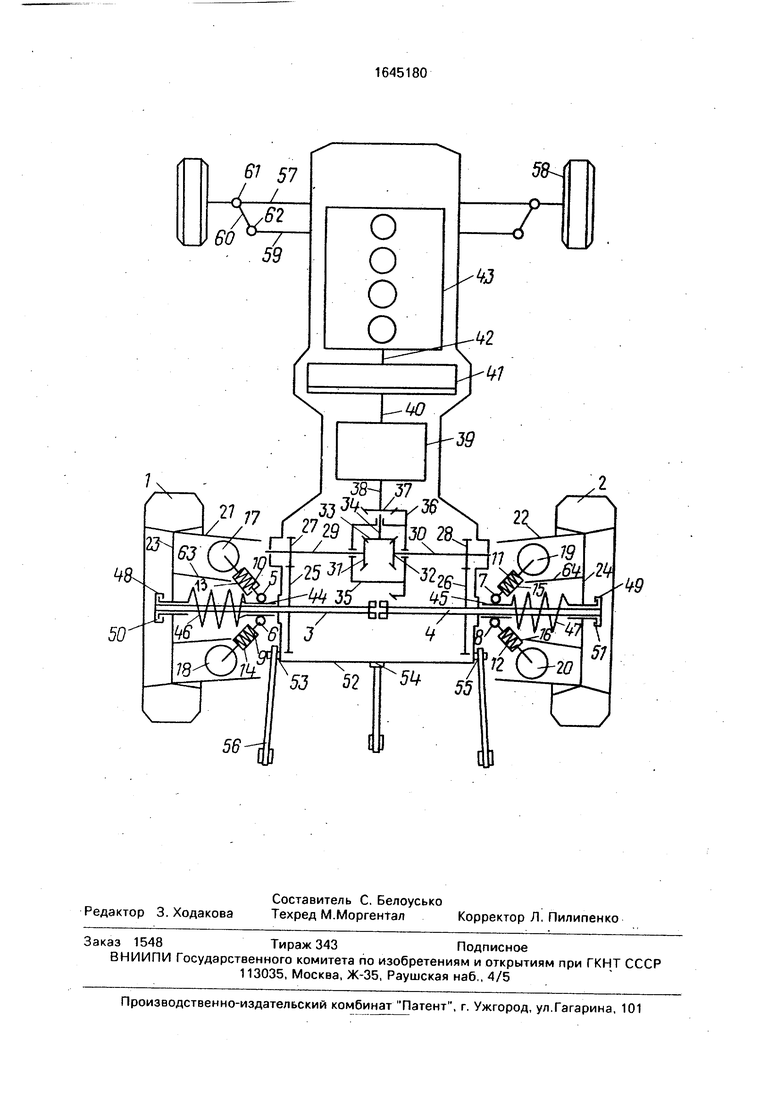
На чертеже показана кинематическая схема устройства машинно-тракторного агрегата, реализующая способ стабилизации направления движения.
Способ содержит перечень операций, последовательность выполнения которых позволяет в момент появления рассогласования угловых скоростей движителей увеличить момент инерции полуоси движителя, имеющего меньшую частоту вращения путем раскручивания на ней технологических грузов крутящим моментом двигателя трактора, не превышающим момента на движителе, имеющем большую частоту вращения, и ограниченным величиной касательной силы тяги по условиям сцепления на этом движителе.
Движители 1 и 2 соединяют с полуосями
3и 4 шарнирами 5, 6 и 7, 8, упорами 9, 10 и 11, 12, упругими элементами 13, 14 и 15, 16, технологическими грузами 17, 18 и 19, 20. В момент появления рассогласования угловых скоростей движителей на полуоси 3 или
4отстающего по частоте движителя 1 или 2 раскручивают технологические грузы 17, 18 или 19, 20 и поджимают их к дополнительному диску 21 или 22. Такой последовательностью технологических операций момент инерции раскрученных грузов 17, 18 или 19, 20 прикладывают к отстающему по частоте вращения движителю 1 или 2, способствуя выравниванию частот вращения обоих движителей. Дополнительные диски 21 и 22 соединены с дисками 23, 24 движителей 1 и 2. На полуоси 3 закреплена шестерня 25 главк
сл со
о
ной передачи, а на полуоси 4 закреплена шестерня 26 главной передачи. Шестерни главной передачи 25 и 26 соединены с шестернями 27 и 28, закрепленными на валах 29 и 30. На торцы валов 29 и 30 насажены шестерни 31 и 32, между которыми расположен сателлит 33, ось 34 которого закреплена в коробке дифференциала 35. На коробке дифференциала 35 закреплена коническая шестерня 36, которая шестерней 37 и валом
38соединена с коробкой 39 передач. Валом 40, муфтой 41 сцепления и валом 42 коробка
39передач соединена с двигателем 43. Шарниры 5, 6 и 7, 8 закреплены на шлице- вых втулках 44 и 45 с возможностью их перемещения по полуосям 3 и 4 соответственно. Пружинами 46, 47 шлице- вые втулки соединены с фланцами 48, 49, подвижно закрепленными на фланцах 50, 51 полуосей 3 и 4. К корпусу 52 на пальцах 53 - 55 подключен механизм навески 56. К корпусу 52 подсоединен передний мост 57 и управляемые колеса 58, управление которыми осуществляется посредством поперечной рулевой тяги 59, рычагов 60, которые соединены между собой шарнирами 61, 62. На диске 23 закреплен вставной диск 63, а на диске 24 - вставной диск 64.
Способ осуществляется следующим образом.
При движении машинно-тракторного ai регата крутящий момент от двигателя трчктора 43 на полуоси 3 и 4 передается посредством вала 42, муфты сцепления 41, вала 40, коробки передач 39, вала 38, шестерни 37, конической шестерни 36, коробки дифференциала 35, оси 34 сателлита, сател- пита 33, шестерен 31 и 32, валов 29 и 30, шестерен 27 и 28, шестерен главной передачи 25 и 26, На поле, характеризуемом одинаковым коэффициентом сцепления движителей 1 и 2 с почвой и симметричным распределением тягового сопротивления по механизму навески 56, коробка дифференциала 35 и заключенные в ней детали вращаются как одно целое вокруг оси полуосей 3 и 4. При этом сателлит 33 вокруг своей оси не вращается и играет роль клина, когда один из движителей 1 или 2 попал на скользкий участок почвы, т.е. на участок почвы с низким коэффициентом сцепления, или произошло перераспределение тягового сопротивления на механизме навески. Гак как сила сцепления движителя, например 1, с почвой мала, для вращения этого движителя может быть реализован лишь небольшой крутящий момент; такой же небольшой момент передается и на другой движитель 2, у которого сцепление с почвой
хорошее, но малая величина момента оказывается недостаточной для создания необходимой тяговой силы, способной двигать машинно-тракторный агрегат. Движение
машинно-тракторного агрегата замедляется. В этом случае полуось 3 начинает вращаться быстрее коробки дифференциала 35 и шестерня 32 заставляет сателлит 33 вращаться вокруг своей оси 34. Частота вращения движителя 2 уменьшается, технологические грузы 19 и 20 также вращаются с меньшей частотой и, поворачиваясь в шарнирах 7 и 8, отходят от дополнительного диска 22 и приближаются к полуоси 4.
Пружина 47 препятствует уводу шарниров 7 и 8 с шлицевой втулкой 45 по полуоси 4 от диска 24. В крайнем нижнем положении технологические грузы 19 и 20 опираются на вставной диск 63. Под действием неболыиого крутящего момента, реализуемого от дви- гателя 43 колесным движителем 1, технологические грузы 19 и 20 начинают раскручиваться там как коробка дифференциала 35 и заключенные в ней детали начинают вращаться как одно целое, а сателлит 33 вокруг своей оси не вращается, играя роль клина. При раскручивании технологических грузов 19 и 20 они поджимаются к поверхности дополнительного диска 22 путем поджатия упругих элементов 15 и 16 и уменьшения расстояния между технологическими грузами 19, 20 и упорами 11, 12, а также сжатия пружины 47 и приближении шарниров 7 и 8 к диску 24. Под действием
приложенного к диску 24 инерционного момента от технологических грузов 19, 20 дви- житель 2 приобретает дополнительно угловую скорость вращения. Такая последовательность технологических операций
приведет к выравниванию частот вращения движителей 1 и 2,
Формула изобретения Способ стабилизации направления движения машинно-тракторного агрегата, включающий выравнивание скоростей боковых движителей трактора, отличающийся тем, что, с целью повышения курсовой устойчивости агрегата, выравнивание скоростей боковых движителей осуществляют увеличением момента инерции движителя, имеющего меньшую частоту вращения, путем раскручивания на полуоси этого движителя технологических грузов
5 крутящим моментом двигателя агрегата, не превышающим момента на движителе, имеющим большую частоту вращения, и ограниченным величиной касательной силы тяги по условиям сцепления на зтом движителе.
56
ID
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| ТО и инструкция по эксплуатации | |||
| Минск: Ураджай, 1977, с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
