2, Система управления по п. 1, отличающаяся тем, что четвертое запоминающее устройство содержит запоминающиеузлы по числу Киозон, каждая из которых, состоит из первого и второго элементов НЕ, четырнадцатого и пятнадцатого элементов. НЕТ, третьего и четвертого формирователей импульсов сброса, и пятого и шестого триггеров, первые входы которых подключены к выходам соответственно третьего и четвертого формирователей импульсов сброса, входы которых четвертого непосредственно, а
третьего через второй элемент НЕ соединены с третьим входом устрорства и первыми управляющими входами четырнадцатого и пятнадцатого элементо НЕТ, вторые управляющие входы которых подключены к второму входу устройства, информационные входы четырнадцатого непосредствейно, а пятнадцатого через первый элемент НЕ - к первому входу устройства, а выходы к вторым входам соответственно пятого и шестого триггеров, выходы которых соединены с выходами.устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматизированного управления зоотехническими объектами | 1979 |
|
SU1030772A2 |
| Система автоматизированного управления зоотехническими объектами | 1979 |
|
SU1242914A1 |
| Система автоматизированного управления зоотехническими объектами | 1978 |
|
SU989535A1 |
| Вычислительная система "Антикон" для предотвращения столкновения судов | 1983 |
|
SU1136178A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ И ПЕРЕДАЧИ ПОСЛЕДОВАТЕЛЬНОСТИ СИГНАЛОВ | 2005 |
|
RU2299474C2 |
| Устройство для оценки профессиональной пригодности операторов автоматизированных систем управления | 1984 |
|
SU1244697A2 |
| ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2013 |
|
RU2533688C1 |
| Устройство для диагностирования коллекторной электрической машины | 1983 |
|
SU1182446A1 |
| КОНТРОЛЛЕР | 1999 |
|
RU2166205C2 |
| Процессор | 1981 |
|
SU962964A1 |
1.СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗООТЕХНИЧЕСКИМИ ОБЪЕКТАМИ по авт. св. № 989535, о т л и ч а Ю щ а я с я тем, что, с целью по вышения надежности и расширения функциональных возможностей в нее введены четвертое запоминающее устройство и блок управления формирователем сигналов, вход которого соединен с выходом первого распределителя, а выход - с третьим входом второго формирователя сигналов, первый, второй и третий входы четвертого запоминающего устройства подключены соответственно к первому, второму и третьему входам второго, а выход - к третьему входу.устройства индикации, соединенному четвертым входом с выходом перJвого запоминающего устройства. ш с 4: О -
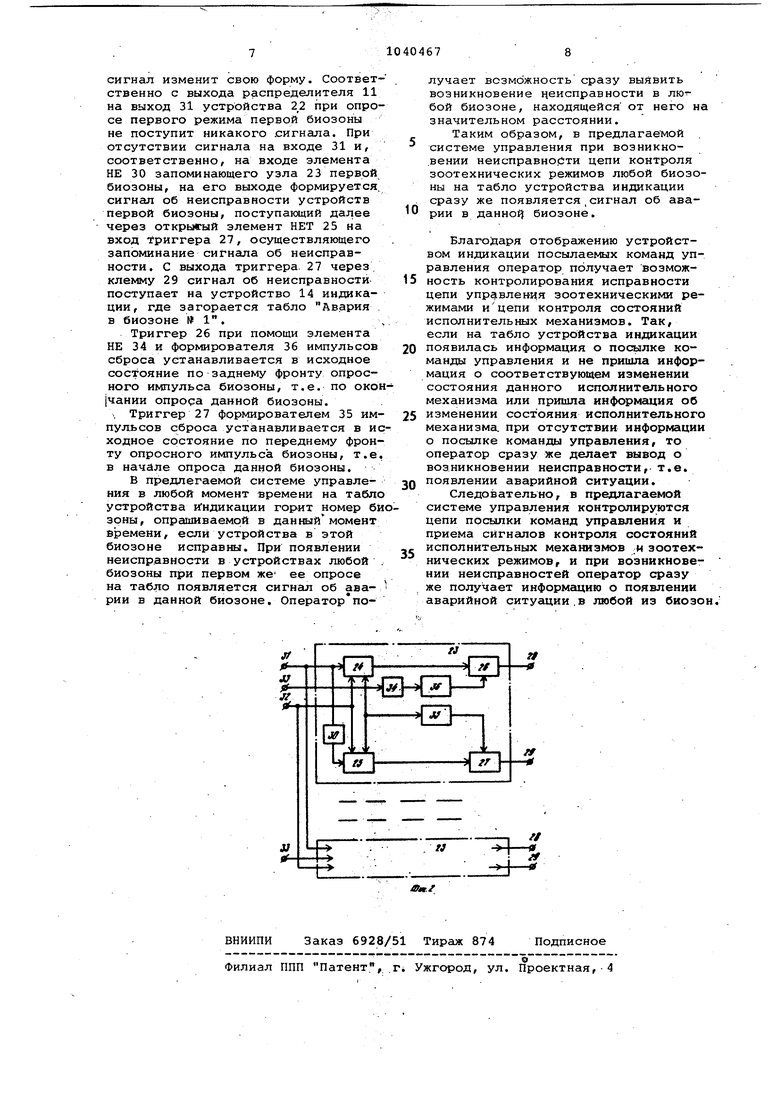
. .1 Изобре1тение относится к сельскому хозяйству и может быть использовано, в частности в животноводстве и птицеводстве для контроля и управления режимами содержания птицы или животных на крупных птицеводческих(животноводческих) комплексах. По основному авт. св. 989535 известна система, которая предназначена для обеспечения централизованного и оперативного контроля и управ ления различными режимами одновремен но нескольких биозон по различным программам и содержит запоминающие устройства, командное .устройство, устройство ручного управления, счетчики, генератор импульсов, устройство индикации, коммутаторы, дешифраторы, распределители, формирователи сигналов, исполнительные механизмы и блоки датчиков. Выходы второго и третьего запоминающих устройств соединены с входами устройства-индикации, первые входы - соответственно с выходами второго и третьего рас пределителей, а вторые входы - с выходом первого счетчика, первым входо командного устройства, первыми входами второго и третьего распределителей и входом первого коммутатора, выход которого соединен с выходом вт рого коммутатора и через первый распределитель - с первыми входами первого и второго формирователей сигналов и дешифратора, подключенного вто рым входом к выходу командного уст ройства, второй вход которого подсоединен к выходу первого запоминающег устройства, а трётий вход - к третьим входом второго и третьего за. поминсиощих устройств, входу второгю коммутатора и выходу второго счетчика, вход которого через первый счетчик соединен с выходом генератора импульсов, выход дешифратора чере исполнительный механизм подключен к второму входу первого формирователя сигналов, соединенного с вторым входом третьего распределителя, выход блока датчиков через второй формирователь сигналов подключен к второму входу второго распределителя, первый выход устройства ручного управления к четвертому входу командного устройства а второй и третий выходы соответственно к вторым входам первого и второго счетчиков. В известной системе команды уп-. равления, вырабатываемые первым запоминающим устройством или устройством ручного управления, поступают через командное устройство, линию связи и дидифраторы на исполнительные механизмы. От исполнительных механизмов и датчиков через первый и второй формирователи;сигналов, линии связи, второй и третий распределителе}, второе и третье запоминающее устройства, на устройство индикации поступают сигналы о состоянии исполнительных механизмов и сигналы контроля за режимами. С помощью генератора импульсов, первого и вто рого счетчиков, первого и второго коммутаторов и первых распредели- талей осуществляется синхронизация всей системы автоматизированного. . упра вления, т.е. поочередность прохождения команд управления, сигналов контроля режимов и сигналов подтверждения исполнения команд. Оператор с помощью устройства индикации визуально контролирует состояние исполнительных .механизмов, расположенных в биозонах, а также необходимые рржимы жизнеобеспечения данных биологических объектов. Возникновение неисправностей в системе управления приводит к потере контроля и управления зоотехническими режимами бнозон, т.е. возникает аварийная ситуация и чем быстрее оператор поЛучит информацию о появлении аварийной, ситуации,.тем быстрее он сможет принять меры к ; ее устранению l , Недостатки известной системы неисправности цепи управления зоотехническими режимами (т.е. неисправность командного устройства, дешифратора или. исполнительных ме-. х-анизмов), цепи контроля состояний исполнительных механизмов (т.е. неисправность первого формирователя сигналов, ,. третьего распределителя или третьего запоминающего устрой, ства)и цепи контроля зоотехнически .режимов (т.е. неисправность блока датчиков, второго формирователя сиг налов,, второго распределителя или второго запоминающего устройства), При неиспоавности устройств пе-о редачи команд уг равления (командного устройства и дешифратора) или ис полнительных механизмов команды управления режимами- биозон не выполняются, т..е. теряется управление биозон. Возникает аварийная ситуация, в которой.управление фактически- потеряно, а оператор об этом узнает не сразу, так как он получает информацию о состоянии исполните ных механизмов в биозонах и не полу чает никакой.информации о командах управления исполнительными механизмами, посылаемыми первым запоминающим устройством в режиме автомати-ческого управления.: Неисправность цепи контроля сЬ стояний исполнительных механизмов или цепи контроля зоотехнических режимов приводит к тому, что в известной системе управления осуществляется последовательный контроль каждого зоотехнического режима: сначала первой биозоны, затем второй и т.д. до последней, посл; , чего цикл повтЪряют сначала-. Со- ответственно с данным последователь ным опросом на .табло устройства индикации обновляется информация о состоянии иЬполнительных меха низмов и зоотехнических режимов. Причем соответствие информации 6 каждой из биозон действительному / состоянию исполнительных механиэ-. мов и режимов в данной биозоне зависит от исправности формирователей сигналов в этой биозоне. Так, если, например, в. пятой биозоне возника-. ет неисправность формирователей сигналов, которые в данном случа формируют и посылают в линии связи сигналы, не соответствующие действи тельности, .устройство индикации выдает ложную информацию о пятой биозоне. В этой биозоне возникает .аварийная ситуация. Цель изобретения - расширение функциональных возможностей и повышение надежности системы. Поставленная цель достигается тем, что в известную систему автоматизированного управления зоотёх-ническими объектами введены четвертое запоминающее устройство и блок управления формирователем сигналов, вход которого соединен с выходом первого распределителя, а выход с третьим входом второго формиро вателя сигналов, первый, второй и третий входы четвертого запоминающего устройства подключены соответственно к первому, второму и третьему входам второго, а выход к третьему входу устройства й.ндикации, соединенному четвертым входом с выходом первого запоминающего устройства. Кроме того, четвертое запоминающее устройство содержит запоминаюшие.узлы по числу биозон, каждая из которых состоит из первого и второго элементов НЕ, четырнадцатого и пятнадцатого элементов НЕТ, третьего и четвертого формирователей импульсов сброса, и пятого и шестого триггеров, первые входы крторых подключены к выходам соответственно третьего и четвертого формирователей илшульсов сброса, входы которых четвертого непосредственно, а третьего через второй элемент НЕ соединены с третьим входом устройства и третьими управляющими входами четырнадцатого и пятнадцатого элементов НЕТ, вторые управляю-. щие входы которых подключены к второму входу устройства, информа- . ционный входы четырнадцатого непосредственно, а пятнадцатого через первый элемент НЕ- к первому входу устройства, а выходы - к вторым входам соответственно Ьятого и шестого триггеров, входы которых соединены с выходами устройства. На фиг. 1 представлена структурная схема систекш автоматизированного управленияf на фиг, 2 - структурная схема четвертого запоминающего устройства, Система автоматизированного.управления содержит (фиг. 1) первое запоминающее устройство 1 и устройство 2 ручного управления, подклю- ченные к командному устрЬйству 3, выход которого .подключен к находящимся в биозонах 4 дешифраторам 5, Дешифратор 5 подключен к исполнительным механизмам 6, связанным с пер:вым формирователем 7 сигналов, выход которого подключен к третьему распределителю 8, Находящийся в биозоне 4 блок 9 датчиков через второй формирователь 10 сигналов связан с вторым распределителем 11. Распределители 8 и 11 через третье и второе запоминающие устройства 12 и 13 соответственно связаны с устройством 14 индикации. Генератор 15 импульсов подключен через первый счетчик 16 к второму счетчику 17. Вторые -входы счетчиков 16 и 17 подключены соответственно к второму и третьему выходам устройства 2 .рунного управления. Выходы счетчиков 16 и 17 подключены к устройства ;3, 12 и 13, а также к коммутаторам 18 и 19. Кроме того, счетчик 16 подключен к распределителям 8 и i 11. Выходы коммутаторов 18 и 19 объединены и подключены к находящимся в биозонах 4 первым распределителям 20, выходы которых подключены к дешифратору 5 формирователями 7 и 10 сигналов.
Вход распределителя 20 подключен также к выходу блока -21 управления формирователем сигналов, выход которого соединен с вторым входом формирователя 10 сигналов. Четвертое запоминающее устройство 22 подключено первым, вторым и третьим входами соответственно 13, а выходом к третьему входу устройства 14 индикации, четвертый вход которого соединен с выходом первого запоминающегр устройства 1.
Четвертое запоминающее устройств 22 -(фиг. 2) содержит запоминающие узлы 23 по числу биозон. Каждый узел 23 содержит четырнадцатый элемент НЕТ 4 и пятнадцатый элемент НЕТ 25, выходы которых подключены соответственно через пятый триггер 26 и шестой триггер 27 к выходным клеммам 28 и 29 у-стройства 22. Вход элемента НЕТ 24 непосредственно, а элемента НЕТ 25 через первый элемент НЕ 30 связаны с первым входом
21устройства 22. Первые управляющие входы элементов НЕТ 24 и 25 соединены с вторым входом 32 устройства 22. Третий вход 33 устройства
22подключен к вторым управляющим входам элементов НЕТ 24 и 25, второго элемента НЕ 34 и входу третьего формирователя 35 импульсов сброса, выходом соединенного с
;вторым входом триггера 27. Выход iэлемента НЕ 34 через четвертый фор мирователь 36 импульсов сброса связан с вторым входом триггера 26.
Система атоматизированного управления работает следующим образом
Команды управления, вырабатываемые запоминающим устройством 1, поступают, в устройство 14 и на один из входов устройства 3. На другой вход устройства 3 поступают команды, вырабатываемые устройством 2. С выхода устройства 3 команды управления через линию связи и дешифраторы 5 поступают на исполнительны механизмы 6. От исполнительных механизмов 6 и блока 9 датчиков соответственно через формирова.тели 7 и 10 линии связи, распределители 8 и 11 запоминающие устройства 12 и 13 на устройство 14 поступают сигналы о состоянии исполнительных механизмов и сигналы контроля режимов .
Генератор 15 импульсов, счетчики 16 и 17, коммутаторы 18 и 19, распределитель 20 осуществляют синхронизацию всей системы автоматизированного управления, т.е. поочередность прохождения команд управления, сигналов контроля режимов и сигналов подтверждения испол.яения команд.
При опросе режимов биозон, например, первого режима первой биозоны, на соответствующих выходах распределителя 20, расположенного в данной биозоне, появляются опросные импульсы режима и биозоны. Эти импульсы поступают на вход блока управления формирователем сигналов представляющей собой, например, двуходовый элемент И, причем опросный импульс режима поступает на первый вход, а опросный импульс биозоны на второй вход элемента И. На выходе элемента .И формируется управляющий сигнал, поступающий далее на второй вход формирователя 10 сигналов. При появлении управляющего сигнала на третьем входе формирователя 10 сигналов, на его выходе формируется сигнал об исправности устройств данной биозоны. Это сигнал через линию связи и распределитель 11 поступает на вход 31 четвертого запоминающего устройjCTBa 22. С входа 31 сигнал поступает на входы элементов НЕТ 24 запоминающих узлов 23 и проходит чере элемент НЕ , 24 запоминающего узла 23 первой биозоны, открытого опросными импульсами первого режима и первой биозоны, поступающими соответственно через входы 32 и 33 на управляющие входы данного элемента НЕТ. Далее сигнал поступает на вход триггера 26 и запоминается им. Затем с выхода триггера 26 сигнал об исправности устройсть данной биозоны поступает, например на устройство 14, на котором горит табло Биозона № 1.
в случае неисправности устройств расположенных в первой биозоне,, например, неисправности распределителя 20, формирователя 10 или источников питания устройств 5,7,9,10, 20 и 21, на выходе формирователя 10 при опросе первого режима данной, биозоны бУдет либо отсутствовать сигнал об исправности, либо этот
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР | |||
| Система автоматизированного управления зоотехническими объектами | 1978 |
|
SU989535A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
