со о
KJ
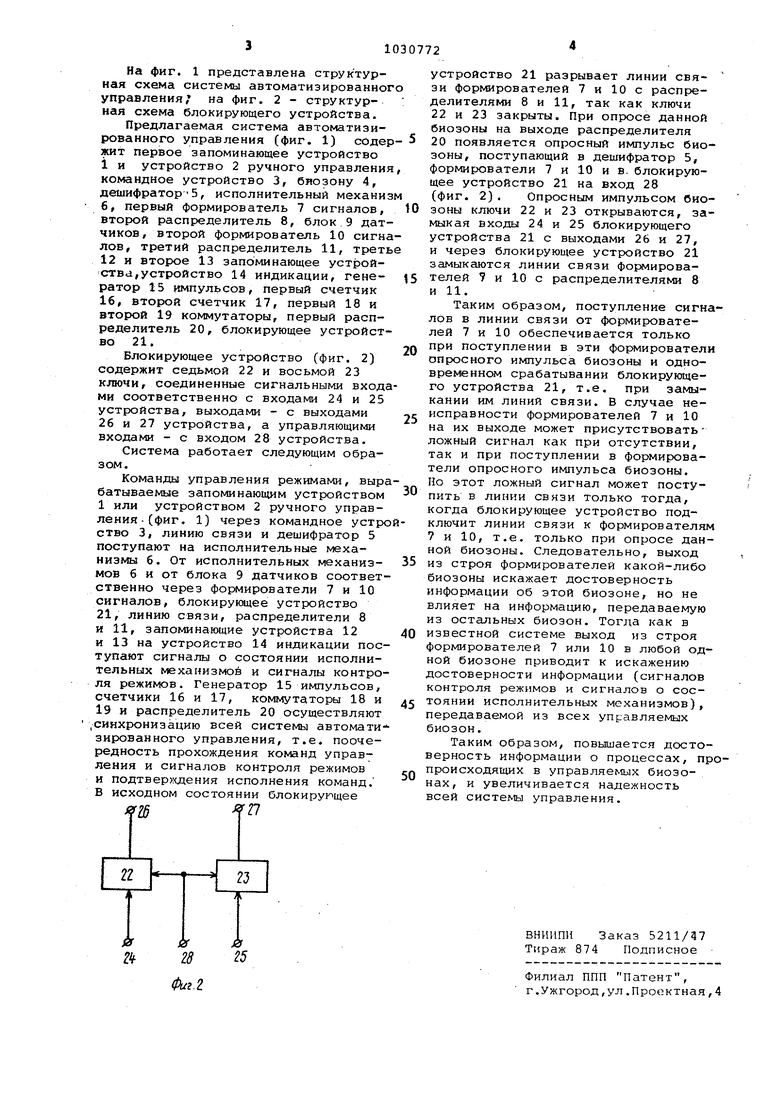
ND ; Изобретение относится к сельско wly хозяйству и может быть испольэо нр, в частности, в животноводстве и птицеводстве для контроля и управления режимами содержания птицы или животных- на крупных птицевод Ческих и животноводческих комплексах , По основному авт. св. 989535 известна система автоматизированно го управления зоотехническими объектами, предназначенная для обеспе чения централизованного и оператив ного контроля и управления различнЫми режимами одновременно несколь ких биозон по различным програмNtaM и содержащая запоминающие устррйства, командное устройство, уст рЬйство ручного управления, счетчи ки, генератор импульсов, устройство индикации, коммутаторы, дешифра торы, распределители, формирователи сигналов/ исполнительные механи мы и блоки датчиков. Выходы Biroporo и третьего запоминающих устройств соединены с входами устройства индикации, первые входы соответственно с выходами второго и третьего распределителей, а вторые входы - с выходом первого счет чика, первым входом командного устройства, с первыми входами второго и третьего распределителей и с входом первого коммутатора, выход которого соединен с выходом второго KONwyTaTOpa и через первый I распределитель - с первыми входами первого и второго формирователей сигналов и дешифратора, подключенно го вторым входом к выходу командного устройства, второй вход которого подсоединен к выходу первого запоминающего устройства, а третий вход к третьим входам второго и третьего запоминающих устройств, к входу второго коммутатора и. выходу второго счетчика, вход которого через счетчик соединен с выходом генератора импульсов, выход дешифра тора через исполнительный механизм Подключен к второму входу первого формирователя сигналов, соединенного с вторым входом третьего распределителя, выход блока датчиков через второй формирователь сигналов подключен к второму входу второго р пределителя, первый выход устройства ручного управления - к четвертому входу .командного устройства, ci в рой и третий выхода - соответственн к вторым входам первого и второго счетчиков 1}. Команды управления, вырабатываеMfcie первым запоминающим устройством или устройством ручного управления поступают через командное устройство, линию связи и дешифраторы на исполнительные механизг и. От испол нительных механизмов и от датчиков , через первый и второй формирователи сигналов, линии связи, второй и третий распределители, второе и третье запоминающие устройства на устройство индикации поступают сигналы о состоянии исполнительных механизмов и сигналы контроля за режимами. С помощью генератора tfMпульсов, первого и второго счетчиков, первого и второго коммутаторов и первых распределителей осуществляется синхронизация всей системы автоматизированного управления, т.е. поочередность прохождения команд управления, сигналов контроля режимов и и сигналов подтверждения исполнения команд. Нарушение очередности прохождения по линиям связи команд и сигна-лов ведет к ложным срабатываниям исполнительных механизмов и к выдаче устройством индикации ложной информации о Процессах, Происходящих в биозонах. В случае исправности системы такой зффект исключается, так как система синхронизирована. Наибольшее влияние на достоверность информации оказывают формирователи сигналов, расположенные в биозонах, так как при выходе их из строя в любой одной биозоне от них может поступить в линию связи ложный сигнал, причем этот сигнал будет поступать в линию не только при опросе данной биозоны, но и при опросе других биозон, в которых формирователи исправны. То есть выход из . строя формирователей одной биозоны искажает сигналы контроля и подтверждения не- только от этой биозоны, а от всех управляемых биозон. Целью изобретения является повышение надежности CHCTeNtj путем повышения достоверности информации о процессах, происходящих в управляемых объектах при аварийной ситуации в одной из биозон. Поставленная цель достигается тем, что в системе автоматизированного управления зоотехническими объектами в каждую биозону введено блокирующее устройство, подключенное первым входом к выходу первого распределителя, вторым и третьим входаи - соответственно к выходам первого и второго формирователей сигналов, а первым и вторым выходами соответственно к входам третьего и второго распределителей. Кроме того, блокирующее устройство содержит седьмой и восьмой ключи, управляющие входа которых подключены к первому входу устройства, сигнальные входаа - соответственно к второму и третьему входам устройства, а выхода - соответственно к первому и второму входам. На фиг. 1 представлена структурная схема системы автоматизированног управления/ на фиг. 2 - структурнал схема блокирующего устройства. Предлагаемая система автоматизированного управления (фиг. 1) содер жит первое запоминающее устройство i и устройство 2 ручного управления командное устройство 3, бпозону 4, дешифратор-5, исполнительный механи 6, первый формирователь 7 сигналов, второй распределитель 8, блок.9 датчиков, второй формирователь 10 сигна лов, третий распределитель 11, треть 12 и второе 13 запоминающее устройств а, устройство 14 индикации, генератор 15 импульсов, первый счетчик 16, второй счетчик 17, первый 18 и второй 19 коммутаторы, первый распределитель 20, блокирующее устройство 21. Блокирующее устройство (фиг. 2) содержит седьмой 22 и восьмой 23 ключи, соединенные сигнальными вход ми соответственно с входами 24 и 25 устройства, выходами - с выходами 26 и 27 устройства, а управляющими входами - с входом 28 устройства. Система работает следующим образом. Команды управления режимами, выр батываемые запоминающим устройством 1 или устройством 2 ручного управления -(фиг. 1) через командное устр ство 3, линию связи и дешифратор 5 поступают на исполнительные механизмы 6. От исполнительных механизмов 6 и от блока 9 датчиков соответ ственно через формирователи 7 и 10 сигналов, блокирующее устройство 21, линию связи, распределители 8 и 11, запоминающие устройства 12 и 13 на устройство 14 индикации пос тупают сигналы о состоянии исполнительных механизмов и сигналы контро ля режимов. Генератор 15 импульсов, счетчики 16 и 17, коммутаторы 18 и 19 и распределитель 20 осуществляют синхронизацию всей системы автомати зированного управления, т.е. поочередность прохождения команд управления и сигналов контроля режимов и подтверждения исполнения команд. В исходном состоянии блокирупщее устройство 21 разрывает линии связи формирователей 7 и 10 с распределителями 8 и 11, так как ключи 22 и 23 закрыты. При опросе данной биозоны на выходе распределителя 20 появляется опросный импульс биозоны, поступающий в дешифратор 5, формирователи 7 и 10 и в. блокирующее устройство 21 на вход 28 (фиг. 2). Опросным импульсом биозоны ключи 22 и 23 открываются, замыкая входы 24 и 25 блокирующего устройства 21 с выходами 26 и 27, и через блокирующее устройство 21 замыкаются линии связи формирователей 7 и 10 с распределителями 8 и 11. Таким образом, поступление сигналов в линии связи от формирователей 7 и 10 обеспечивается только при поступлении в эти формирователи опросного импульса биозоны и одновременном срабатывании блокирующего устройства 21, т.е. при замыкании им линий связи. В случае неисправности Формирователей 7 и 10 на их выходе может присутствовать ложный сигнал как при отсутствии, так и при поступлении в формирователи опросного импульса биозоны. Но этот ложный сигнал может поступить в линии связи только тогда, когда блокирующее устройство подключит линии связи к формирователям 7 и 10, т.е. только при опросе данной биозоны. Следовательно, выход из строя формирователей какой-либо биозоны искажает достоверность информации об этой биозоне, но не влияет на информацию, передаваемую из остальных биозон. Тогда как в известной системе выход из строя формирователей 7 или 10 в любой одной биозоне приводит к искажению достоверности информации (сигналов контроля режимов и сигналов о состоянии исполнительных механизмов), передаваемой из всех управляемых биозон. Таким образом, повышается достоверность информации о процессах, пропроисходящих в управляемых биозонах, и увеличивается надежность всей системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматизированного управления зоотехническими объектами | 1979 |
|
SU1040467A2 |
| Система автоматизированного управления зоотехническими объектами | 1979 |
|
SU1242914A1 |
| Система автоматизированного управления зоотехническими объектами | 1978 |
|
SU989535A1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ О СОСТОЯНИИ КОНТРОЛИРУЕМЫХ ПУНКТОВ И ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА "ЛИЛАНА" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2010338C1 |
| Устройство программного управления роботами гальванической линии | 1983 |
|
SU1124250A1 |
| Устройство для контроля работы оператора | 1990 |
|
SU1737485A1 |
| Система телемеханики | 1984 |
|
SU1257686A1 |
| Устройство управления резонансным позиционным механизмом | 1987 |
|
SU1451646A1 |
| Тренажер оператора автоматизированной системы управления | 1981 |
|
SU983738A1 |
| Система телемеханики | 1982 |
|
SU1152015A1 |
1.СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗООТЕХНИЧЕСКИМИ ОБЪЕКТАМИ по авт. св. № 989535, отличающаяся тем, что., с целью повышения надежности системы, 3 каждую биоэону введено блокирующее устройство, подключенное первым эходом к выходу первого распределителя, вторым и третьго входами соответственно к выходам первого и второго формирователей сигналов, а первым и вторым выходами - соответственно к входам третьего и второго распределителей. 2. Система по п. 1, отличающаяся тем, что блокирующее устройство содержит седьмой и восьмой ключи, управляющие входы которых подключены к первому входу устройства, сигнальные входы соответственно к второму и третьему его входам, а выходы - соответственно к первому и второму его входам.S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система автоматизированного управления зоотехническими объектами | 1978 |
|
SU989535A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
