1243825
дующий интервал управления как сум- равления, и величины приращения рас- му величины расхода реагента, опре- хода этого же реагента,определенного деленного для текущего интервала уп- для последующего интервала управления .
I
Изобретение относится к автоматизации управления процессом флотации и может быть использовано на фабри- ках по обогащению руд черных, цветных металлов и других полезных ископаемых .
Целью изобретения является повьше- ние эффективности и точности управления процессом флотации.
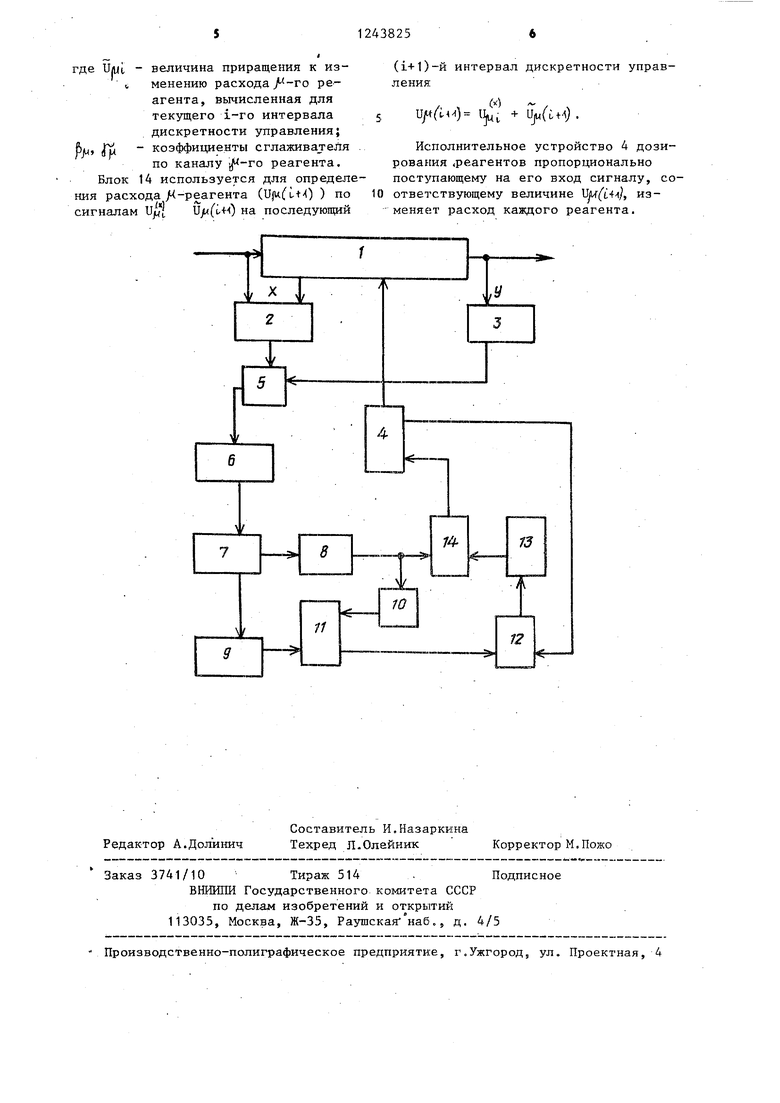
На чертеже приведена блок-схема. .
Схема включает объект 1 регули-. рования, датчики 2, контролирующие расход исходного питания (входная переменная), параметры пульпы - плотность, щелочность, крупность, толщину слоя пены, остаточную концентрацию реагентов, содержание полезных компонентов в промежуточных продуктах- (переменные состояния),датчики 3, контролирующие содержание полезных компонентов в конечных продуктах (выходные переменные), исполнительное устройство 4 дозирования реагентов, устройство 5 фильтрации внешних возмущений, вычислительное устройство 6, определяющее величину отклонения контролируемых переменных от заданных значений, устройство 7 сравнения, осуществлякидее проверку отклонений контролируемых переменных на соответствие их допустимым диапазонам, регулятор 8, блок 9 коррекции, блок 10 памяти, блок 11 оптимального расхода реагентов, блок 12 вычисления ощибки управления, блок 13 прогнозирования, блок 14 определения расхода реагентов на последующий интервал управления.
Способ осуществляется следующим образом.
На объекте 1 с помощью датчиков 2 и 3 контролируют расход исходного питания, содержание полезных компонентов в исходных, промежуточных и конечных продуктах, плотность, щелочность пульпы, крупности твердой
фазы пульпы и остаточной концентра- ции реагентов.
Сигналы с датчиков, пропорциональные измеряемым переменным, поступают 5 на устройство 5 фильтрации внешних возмущений, где усредняются на теку- ,щем i-oM интервале дискретности управления в соответствии с выражениями
10 N-U
ХуК ..l LYfUc,
де Xvi , XviK- соответственно средние и мгновенные значения v-й переменной состояния (или входной переменной); YI/I, , Y«fi,K - соответственно средние
и мгновенные значения
. „
выходной переменной;
N - число опросов датчиков на интервале управле ия
Сигналы, соответствующие средним значениям измеряемых переменных, поступают на вычислительное устройство 6,. определяющее величину их от- тспонения от заданных значений
(3)(51
AXvi Xv -Xvl ; uYifi Yif-- YijCi , гдедХуи dYfi, - соответственно отклонение входных I переменных,переменных состояния и вы- (У) (,1 . ходных переменных; v 5 1/ заданные значения
входных переменных, переменных состояния и выходных переменных.
Сигшшы, соответствующие AXVL .и , , поступают на устройство 7 сравнения, где осуществляется проверка их на отклонение от допустимых диапазонов изменения
(ммн) ; uXvt ЛХ у
Дммн)
.у(мин) Д 1 t AJ-u;
; aYt/KuY
(МАКС.) (чии) где 4Ху X / - соответственно ма
симальное и минимальное значения v-й переменной состояния, входной переменной; - соответственно максимальное и минимальное значения lf-й входно переменной. Если указанные условия вьшолняют- ся для величины дХу, то сигнал, соответствующий ее значению, поступает на вход регулятора 8. При выполнении данных условий для величины ;(; сигнал, соответствующий ее значению, поступает на вход функционального блока 9 коррекции.
С помощью регулятора 8 определяют UjTl - величину изменения расхода реагента на i-м интервале дискретности управления с выражением
и,
х)
Vu
М
и., : - 2L .у ДХ Г део{. коэффициент, определяющий расход реагента в зависимости от величины v-й измеряемой переменной; М - количество измеряемых входных переменных ц переменных35 неконтролируемых факторов, а также
состояния.
.М
Сигнал, соответствующий и., , поступает на блок 10 памяти, где он хранится в течение интервала дискретности управления, а с выхода данного блока снимается сигнал U/u Cl- i} ° ответствующий величине изменения расхода ju-ro реагента на предьщуще м (i-l)-OM интервале управления.
Блок 9 коррекции по отклонению выходных переменных рассчитывает UMU корректирующее значение расхода реагента для i-ro интервала дискретности управления в соответствии с типовым пи-законом регулирова- ния
U(i.-n)UjMi+fjM
UJT (t) (t) +
5
Ю 5
5
0
0
где Кр , Ти} - соответственно коэффициент передачи и постоянная интегрирования по каналу управления Я -го реагента.
у.Сигналы, соответствующие ) и UjH , поступают на вход блока 11 оценки оптимального расхода реагентов, где определяется - величина оптимального изменения расхода /«-го реагента для текущего i-ro интервала дискретности управления:
. (О (4}
+ UjMl.
Сигнал, соответствующий величине UjuL-расхода f-rb реагента на текущем i-OM интервале дискретности управде- ния, измеряется на входе исполни- I тельного устройства 4 дозирования реагентов и подается на функциональный блок 12 определения ошибки управления.
Из совокупности сигналов Uui и Ujui,, поступающих на вход блока 12 вьиислендя ошибки управления, вычисляют Ujuti. - ошибку, допущенную при дозированииуи-го реагента на текущем i-oM интервале дискретности управления и обусловленную влиянием
погрешностями системы контроя и управления
и
- и«
)1 - Г
Для компенсации указанной ошибки управления используется блок 13 прогнозирования, реализованный на базе фильтра, работающего по принципу релейно-экспоненциального сглаживате- ля.Блок Прогнозирования определяет и jU (-и) - величину приращения к изменению расхода -го реагента для ми- . нимизации ошибки управления на последующем (1+1)-ом интервале дискретности управления
U -Uffi.; при
гг - € -5;ф{-я
где U|ul - величина приращения к из- (, менению расхода -го реагента, вычисленная для текущего i-ro интервала дискретности управления; а VV коэффициенты сглаживатеЛя по каналу У«-го реагента,
Блок 14 используется для определения расхода -реагента (U|W(:Lt () ) по сигналам U( на последующий
I, X
/
8
(1+1)-й интервал дискретности управления:
(х)
U/t( i.4H) и|ц; + Ujufut j
Исполнительное устройство 4 дозирования .реагентов пропорционально поступающему на его вход сигналу, со- 10 ответетвующему величине UjW(t4V, изменяет расход каждого реагента.
/
74
73
X
./I
11
72

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ аналого-цифрового преобразования | 1979 |
|
SU785991A1 |
| Способ управления процессом графитации | 1985 |
|
SU1312074A2 |
| Устройство для прогнозирования состояния дискретного канала связи | 1981 |
|
SU1003362A1 |
| Система автоматического регулирования | 1988 |
|
SU1569802A1 |
| ПРОГНОЗАТОР | 1996 |
|
RU2113006C1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Устройство для регулирования уровняжидКОСТи B ЕМКОСТи | 1979 |
|
SU830332A2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ ДОЗИРОВАНИЯ ШИХТЫ ДЛЯ ОКУСКОВАНИЯ ЖЕЛЕЗОРУДНЫХ МАТЕРИАЛОВ | 2009 |
|
RU2426802C2 |
| Способ и система для прогнозирования значений временного ряда с использованием искусственной нейронной сети | 2019 |
|
RU2744041C1 |
| Способ программного регулирования и устройство для его осуществления | 1987 |
|
SU1464147A1 |
Редактор А.Долинич
Составитель И.Назаркина Техред Л.Олейник
Заказ 3741/10 Тираж 514 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская °наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная,
Корректор М.Пожо
| Способ управления процессом флотации | 1978 |
|
SU722584A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Авторское свидетельство СССР № 757195, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
