матора 28, фильтра 24 низкой частоты, блока 25 сравнения, запоминающего блока 26, масштабирующего блока 27, запоминающего блока 28, блока 29 задержки, блока 30 определения модуля, задатчика 31, блоков 32,
33 и 34 сравнения, ключа 35, компараторов 36 и 37, блока 38 определения модуля, блока 39 задержки, интегратора 40, блока 41 деления, интегратора 42, задатчика 43 и ключа 44. 3 ил.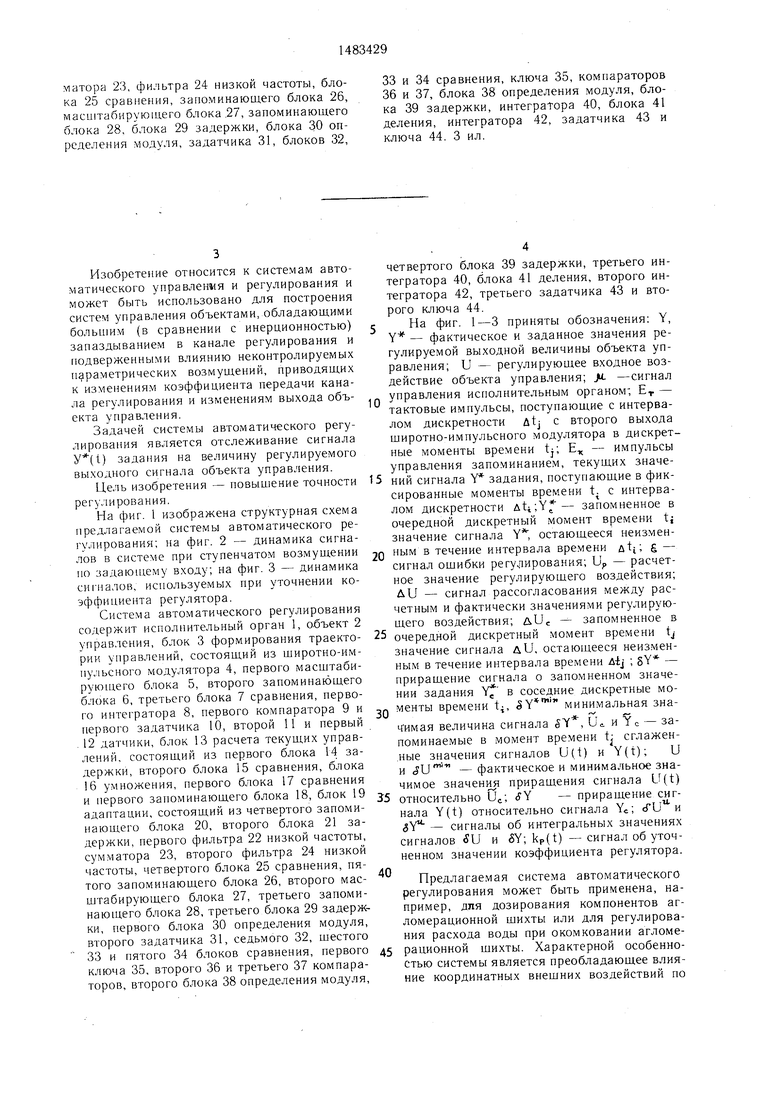

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления непосредственным преобразователем частоты | 1985 |
|
SU1265944A1 |
| Устройство для определения оптимального периода технического обслуживания изделия | 1988 |
|
SU1617453A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2271071C2 |
| Амплитудно-фазовый анализатор гармоник | 1985 |
|
SU1272272A2 |
| Система управления участками производства | 1986 |
|
SU1399699A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Экстраполирующий преобразователь кода в аналоговый сигнал | 1981 |
|
SU1026297A1 |
| Устройство для управления циклоконвертором | 1982 |
|
SU1072237A1 |

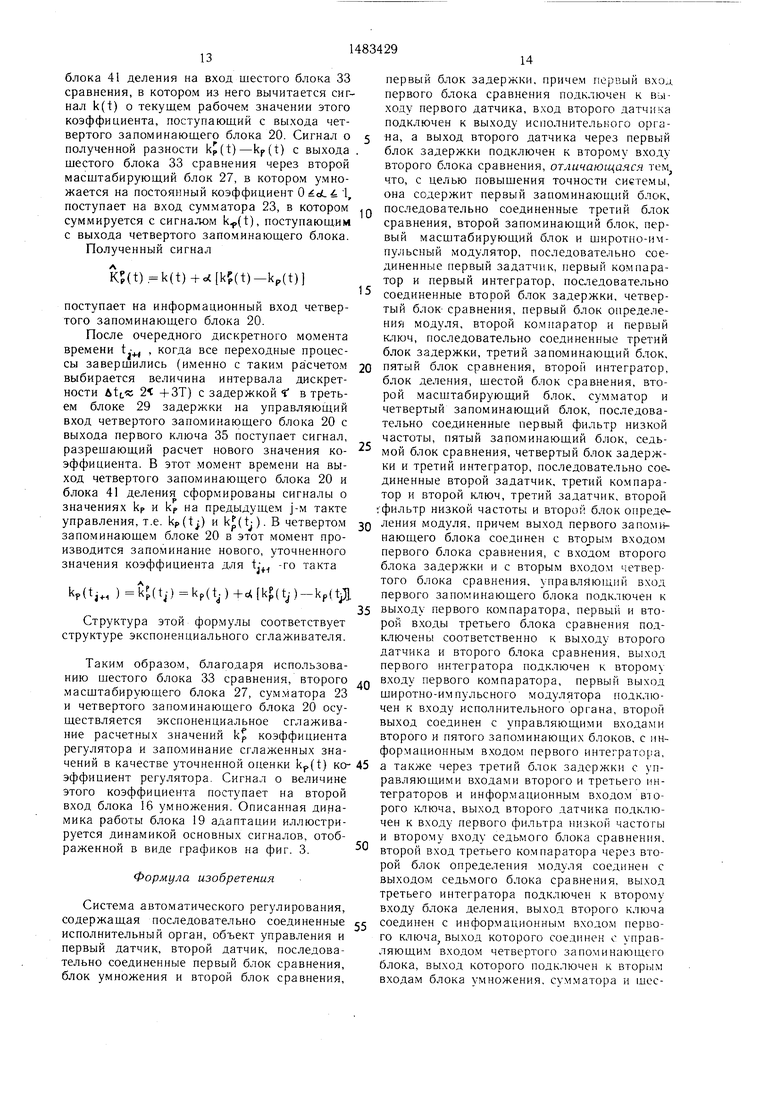
Изобретение может быть использовано для построения систем управления объектами, обладающими большими запаздываниями и подверженными влиянию неконтролируемых параметрических возмущений. Изобретение позволяет повысить точность регулирования. Сущность изобретения заключается в том, что в дискретные моменты времени фиксируется сигнал задания на величину регулируемого выхода объекта, и регулирующие воздействия для отработки изменений сигнала задания реализуются последовательными итерациями в системе регулирования, включающий исполнительный орган 1, объект 2 управления, блок 3 формирования траектории управлений, состоящий из широтно-импульсного модулятора 4, масштабирующего блока 5, запоминающего блока 6, блока 7 сравнения, интегратор 8, компаратора 9 и задатчика 10, датчики 11 и 12, блок 13 расчета текущих управлений, состоящий из блока 14 задержки, блока 15 сравнения, блока 16 умножения, блока 17 сравнения и запоминающего блока 18. Одновременно выполняется подстройка коэффициентов регулятора при изменениях характеристик объекта управления с использованием блока 19 адаптации, состоящего из запоминающего блока 20, блока 21 задержки, фильтра 22 низкой частоты, сумматор 23, фильтра 24 низкой частоты, блока 25 сравнения, запоминающего блока 26, масштабирующего блока 27, запоминающего блока 28, блока 29 задержки, блока 30 определения модуля, задатчика 31, блоков 32, 33 и 34 сравнения, ключа 35, компараторов 36 и 37, блока 38 определения модуля, блока 39 задержки, интегратора 40, блока 41 деления, интегратора 42, задатчика 43 и ключа 44. 3 ил.
Изобретение относится к системам автоматического управления и регулирования и может быть использовано для построения систем управления объектами, обладающими большим (в сравнении с инерционностью) запаздыванием в канале регулирования и подверженными влиянию неконтролируемых параметрических возмущений, приводящих к изменениям коэффициента передачи канала регулирования и изменениям выхода объекта управления.
Задачей системы автоматического регулирования является отслеживание сигнала У(1) задания на величину регулируемого выходного сигнала объекта управления.
Цель изобретения - повышение точности регулирования.
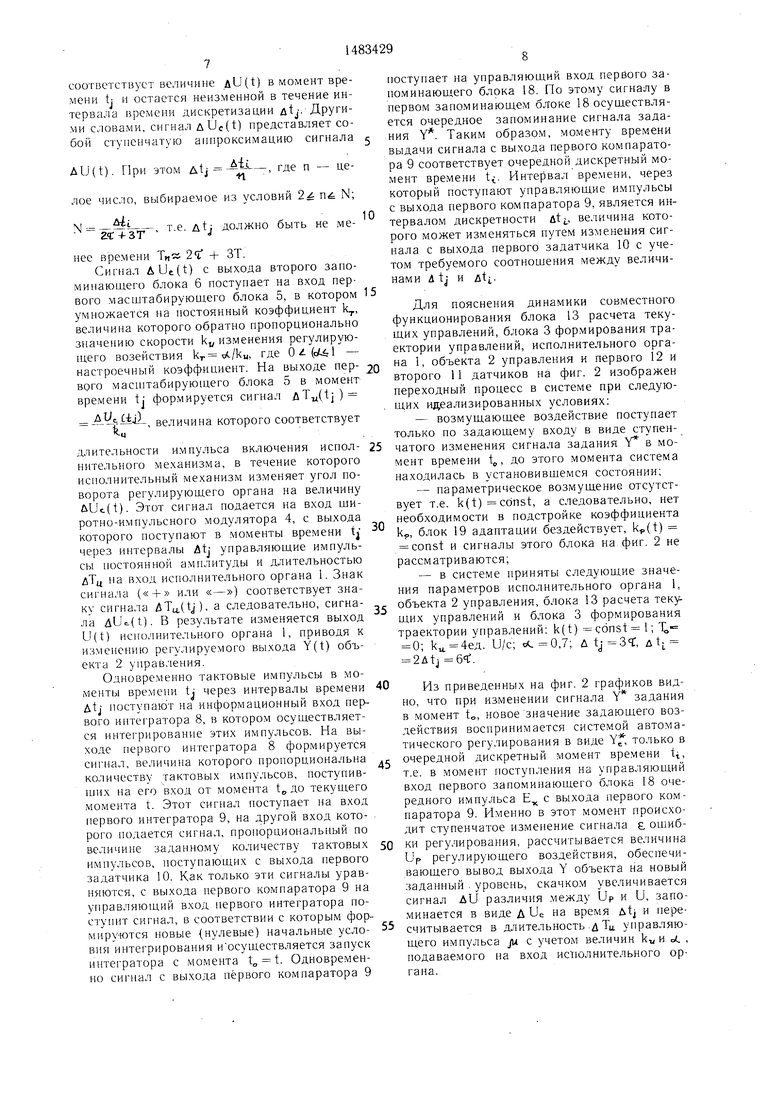
На фиг. 1 изображена структурная схема предлагаемой системы автоматического регулирования; на фиг. 2 - динамика сигналов в системе при ступенчатом возмущении по задающему входу; на фиг. 3 - динамика сигналов, используемых при уточнении коэффициента регулятора.
Система автоматического регулирования содержит исполнительный орган 1, объект 2 управления, блок 3 формирования траектории правлений, состоящий из широтно-им- пульсного модулятора 4, первого масштабирующего блока 5, второго запоминающего блока 6, третьего блока 7 сравнения, первого интегратора 8, первого компаратора 9 и первого задатчика 10, второй 11 и первый 12 датчики, блок 13 расчета текущих управлений, состоящий из первого блока 14 задержки, второго блока 15 сравнения, блока 16 умножения, первого блока 17 сравнения и первого запоминающего блока 18, блок 19 адаптации, состоящий из четвертого запоминающего блока 20, второго блока 21 задержки, первого фильтра 22 низкой частоты, сумматора 23, второго фильтра 24 низкой частоты, четвертого блока 25 сравнения, пятого запоминающего блока 26, второго масштабирующего блока 27, третьего запоминающего блока 28, третьего блока 29 задержки, первого блока 30 определения модуля, второго задатчика 31, седьмого 32, шестого 33 и пятого 34 блоков сравнения, первого ключа 35, второго 36 и третьего 37 компараторов, второго блока 38 определения модуля,
четвертого блока 39 задержки, третьего интегратора 40, блока 41 деления, второго интегратора 42, третьего задатчика 43 и второго ключа 44.
На фиг. 1-3 приняты обозначения: Y, Y - фактическое и заданное значения регулируемой выходной величины объекта управления; U - регулирующее входное воздействие объекта управления; ju. -сигнал управления исполнительным органом; Ет- тактовые импульсы, поступающие с интервалом дискретности Atj с второго выхода широтно-импульсного модулятора в дискретные моменты времени tj; Er - импульсы управления запоминанием, текущих значе5 ний сигнала Y задания, поступающие в фиксированные моменты времени t. с интервалом дискретности д14;У - запомненное в очередной дискретный момент времени tj значение сигнала Y остающееся неизмен0 ным в течение интервала времени g - сигнал ошибки регулирования; Ь р - расчетное значение регулирующего воздействия; AU - сигнал рассогласования между расчетным и фактически значениями регулирующего воздействия; &UC - запомненное в
5 очередной дискретный момент времени tj значение сигнала дЬ1, остающееся неизменным в течение интервала времени д-tj ; sY - приращение сигнала о запомненном значении задания Y в соседние дискретные моQ менты времени i±, у минимальная значимая величина сигнала SY, Uu и Yc - запоминаемые в момент времени tj сглаженные значения сигналов U(t) и Y(t); LJ и jUm - фактическое и минимальное значимое значения приращения сигнала U(t)
5 относительно Uc; - приращение сигнала Y(t) относительно сигнала Yc; fUu и (5Y - сигналы об интегральных значениях сигналов и 6Y; kp(t) - сигнал об уточненном значении коэффициента регулятора.
Предлагаемая система автоматического регулирования может быть применена, например, для дозирования компонентов агломерационной шихты или для регулирования расхода воды при окомковании агломе- 5 рационной шихты. Характерной особенностью системы является преобладающее влияние координатных внешних воздействий по
задающему входу Y и значительное влияние на объект управления параметрических возмущений, приводящих к изменениям, например, коэффициента передачи канала регулирования.
В случае применения предлагаемой системы для регулирования расхода воды сигнала Y представляет собой сигнал задания на текущее значение расхода воды, поступающий из системы управления процессом окомкования аглошихты (на чертеже эта система не показана); Y - текущее фактическое значение расхода воды; U - управляющее воздействие в виде угла поворота регулирующего клапана на водопроводе подачи воды в барабан-окомкователь.
Исполнительный орган 1, обеспечивающий изменение угла поворота регулирующего клапана, представляет собой, например, электрический исполнительный механизм. Объект 2 управления включает в себя регулирующий клапан и участок водопровода от регулирующего клапана до места установки измерителя расхода. Широтно-им- пульсный модулятор 4 представляет собой широтно-импульсный модулятор для биполярного сигнала. Второй 6, первый 18, четвертый 20, пятый 26 и третий 28 запоминающие блоки выполняются, например, в виде устройства для запоминания мгновенного значения сигнала. Первый 8, третий 40 и второй 42 интеграторы представляют собой интегратор с заданием начальных условий. Первый 10, второй 31 и третий 43 задатчики - это, например, источники опорного напряжения. Второй датчик 11 представляет собой, например, преобразователь углового перемещения р-абочего органа ферродинами- ческий типа ПФ. Первый датчик 12 является, например, дифманометром мембранным электрическим бесшкальным типа ДМЭ. Первый 14, второй 21. третий 29 и четвертый 39 блоки задержки выполнены, например, в виде блока запаздывания. Первый 22 и второй 24 фильтры низкой частоты реализуются, например, в виде апериодического звена. Блоки 30 и 38 определения модуля выполнены в виде блока образования модуля. Первый 35 и второй 44 ключи представляют собой замыкающие ключи.
Система работает следующим образом
Сигнал о заданном значении Y(t) регулируемого выхода объекта управления поступает на информационный вход первого запоминающего блока 18. В очередной дискретный момент времени t ( через интервалы дискретности itj) по сигналу, поступающему на управляющий вход-первого запоминающего блока из блока 3 деформирования траектории управления с выхода первого компаратора 9, осуществляется запоминание текущего значения сигнала Yx(t). На выходе первого запоминающего блока 18 формируется сигнал Y/(t), который остается неиз0
0
5
0
5
мснениым в течение интервала времени дискретизации л t,, , т.е. до момента времени 1 t(, , т.е. сигнал Yt(t) представляет собой ступенчатую аппроксимацию сигнала ). Пр.- этом величина &ti выбирается из условия Ati (2 ъ+ЗТ). Этот сигнал поступает с выхода первого запоминающе/о блока 18 на вход первого блока 17 сравнения, где из него вычитается сигнал Y(t) о текущем значении выхода объекта управления, поступающий с выхода первого датчика 12. Сигнал о полученной ошибке регулирования g(t) Y(t)-Y(t) подается с выхода первого блока 17 сравнения на вход блока 16 умножения, где умножается на текущее значение адаптируемого коэффициента kp(t), равного по величине обратному значению гекчще- го коэффициента передачи канала регулирования. На выходе блока 16 умножения формируется сигнал АЬ ис(-Ч) kp(t) 6(t), представляющий собой рассчитываемую с запаздыванием °С корректировку реализованного ранее регулирующего воздействия U(t - г), которую необходимо было выполнить, чтобы fc(t)0. При расчете AU(t- - ЯС) не учитывается инерционность канала регулирования, однако погрешность расчета при этом считается незначительной, учитывая тот факт, что . Сигнал д1 в(1-Я1 ) во втором блоке 15 сравнения складывается с сигналом U(t-ч) о реализованном в момент времени t-- регулирующем воздействии, поступающем с выхода исполнительного органа 1 через первый датчик 11 и первый блок 14 задержки на второй вход второго блока 15 сравнения.
В результате на выходе второго блока 15 сравнения формируется сигнал о текущем регулирующем воздействии
LV(t) U(t-I) +kp(t) Y(t)-Y(t)J,
0
5
поступающий для реализации в блок 3 формирования траектории управления на вход третьего блока 7 сравнения, на второй вход которого поступает сигнал U(t) о текущем фактическом значении регулирующего воздействия с выхода исполнительного органа 1. На выходе третьего блока 7 сравнения формируется сигнал рассогласования ALl(t) U(t)-U(t) между расчетным и фактическими текущими значениями регулирующего воздействия. Этот сигнал поступает на 0 информационный вход второго запоминающего блока 6, в котором запоминаются его значения в дискретные моменты времени 1: с интервалом дискретности .. Запоминание осуществляется в моменты поступления на управляющий вход второго запоминающего блока 6 тактовых импульсов с второго выхода широтно-импульсного модулятора 4. На выходе второго запоминающего блока формируется сигнал AUt(t), величина которого
соответствует величине AU(t) в момент времени t: и остается неизменной в течение интервала времени дискретизации utj. Другими словами, сигнал дОс(1) представляет собой ступенчатую аппроксимацию сигнала
AiL
где п - цеди). При этом Atj - лое число, выбираемое из условий 2 n N; N - 5-rivr - т.е. ATJ должно быть не менее времени Т«а + ЗТ.
Сигнал uUt(t) с выхода второго запоминающего блока 6 поступает на вход первого масштабирующего блока 5, в котором умножается на постоянный коэффициент kT, величина которого обратно пропорционально значению скорости изменения регулирующего возействия kr ot/kH, где О Л- ( - настроечный коэффициент. На выходе пер- врго масштабирующего блока 5 в момент времени 1; формируется сигнал uTu(tj )
- Ajy tttiL.
tq
величина которого соответствует
длительности импульса включения испол- нительного механизма, в течение которого исполнительный механизм изменяет угол поворота регулирующего органа на величину uUc(t). Этот сигнал подается на вход ши- ротно-импульсного модулятора 4, с выхода которого поступают в моменты времени tj через интервалы Atj управляющие импульсы постоянной амплитуды и длительностью дТц на вход исполнительного органа 1. Знак сигнала (« + или «-) соответствует знаку сигнала uTa(tj), а следовательно, сигнала AUt(t). В результате изменяется выход U(t) исполнительного органа 1, приводя к изменению регулируемого выхода Y(t) объекта 2 управления.
Одновременно тактовые импульсы в моменты времени tj через интервалы времени Atj поступают на информационный вход первого интегратора 8, в котором осуществляется интегрирование этих импульсов. На выходе первого интегратора 8 формируется сигнал, величина которого пропорциональна количеству тактовых импульсов, поступивших на его вход от момента t0 до текущего момента t. Этот сигнал поступает на вход первого интегратора 9, на другой вход которого подается сигнал, пропорциональный по величине заданному количеству тактовых импульсов, поступающих с выхода первого задатчика 10. Как только эти сигналы уравняются, с выхода первого компаратора 9 на управляющий вход первого интегратора поступит сигнал, в соответствии с которым формируются новые (нулевые) начальные условия интегрирования и осуществляется запуск интегратора с момента t0 t. Одновременно сигнал с выхода первого компаратора 9
5 о
0
5
5
0
5
0
5
поступает на управляющий вход первого запоминающего блока 18. По этому сигналу в первом запоминающем блоке 18 осуществляется очередное запоминание сигнала задания Y. Таким образом, моменту времени выдачи сигнала с выхода первого компаратора 9 соответствует очередной дискретный момент времени t. Интервал времени, через который поступают управляющие импульсы с выхода первого компаратора 9. является интервалом дискретности Att, величина которого может изменяться путем изменения сигнала с выхода первого задатчика 10 с учетом требуемого соотношения между величинами д tj и д.
Для пояснения динамики совместного функционирования блока 13 расчета текущих управлений, блока 3 формирования траектории управлений, исполнительного органа 1, объекта 2 управления и первого 12 и второго 11 датчиков на фиг. 2 изображен переходный процесс в системе при следующих идеализированных условиях:
-возмущающее воздействие поступает только по задающему входу в виде ступенчатого изменения сигнала задания Y в момент времени 1„, до этого момента система находилась в установившемся состоянии;
-параметрическое возмущение отсутствует т.е. k(t)cbnst, а следовательно, нет необходимости в подстройке коэффициента kp, блок 19 адаптации бездействует, kf,(t) const и сигналы этого блока на фиг. 2 не рассматриваются;
-в системе приняты следующие значения параметров исполнительного органа 1, объекта 2 управления, блока 13 расчета текущих управлений и блока 3 формирования траектории управлений: k(t) const 1; 1,- 0; 4ед. U/c; л. 0,7; Дт., д1- .
Из приведенных на фиг. 2 графиков видно, что при изменении сигнала Y задания в момент t0, новое значение задающего воздействия воспринимается системой автоматического регулирования в виде Y только в очередной дискретный момент времени ti, т.е. в момент поступления на управляющий вход первого запоминающего блока 18 очередного импульса Ех с выхода первого компаратора 9. Именно в этот момент происходит ступенчатое изменение сигнала g. ошибки регулирования, рассчитывается величина Up регулирующего воздействия, обеспечивающего вывод выхода Y объекта на новый заданный уровень, скачком увеличивается сигнал ди различия между Up и U, запоминается в виде A Uc на время Atj и пересчитывается в длительность д Тц. управляющего импульса ju с учетом величин kv и „L , подаваемого на вход исполнительного органа.
Под воздействием импульса ju. исполнительный орган в течение интервала времени дТ.ц со скоростью k-ц. изменяет величину сигнала U на входе объекта 2 управления. Это в свою очередь, приводит через время Ј к изменению выхода Y с той же скоростью и на ту же величину (так как по условию , Т 0). Одновременно происходит и уменьшение на соответствующую величину сигнала 8 ошибки и сигнала &U. Переход- ный процесс на этом шаге управления заканчивается. Система находится в установившемся состоянии до очередного дискретного момента tj, т.е. до поступления очередного тактового импульса Ет.
В момент поступления очередного им- пульса Ет во втором запоминающем блоке 6 запоминается новое установившееся значение сигнала Д1) в виде Д Uc и формируется новый управляющий импульс /ц , длительность которого значительно меньше преды- дущего импульса, так как ошибка регулирования уже уменьшилась в результате первой итерации регулирования. Вторая итерация дает дополнительное уменьшение ошибки.
В момент поступления очередного тактового импульса Ет отновременно поступает на первый запоминающий блок 18 и очередной управляющий импульс UK, в соответствии с которым запоминается текущее значение сигнала Y. Но так как в данном случае Y больше не меняется, то не меняется и
Yf. Ошибка е. в результате предшествующей итерации управления еще уменьшается. Уменьшаются также величины AU и AUC , соответственно, управляющий импульс fj на текущей итерации становится еще короче.
Через последующие интервалы времени At,, ti.i 2Atj описанные итерации регулирования повторяются до полного устранения рассогласования () и (Y -Y).
Таким образом, за конечное число ите- рации в выработке сигналов управления исполнительным органом ошибка регулирования может быть снижена до сколь угодно малого значения. При этом обеспечивается апериодичность переходного процесса, отсутствие статической ошибки.
Рассмотренная часть системы автоматического регулирования без блока адаптации сохраняет свою работоспособность и при воздействии на нее параметрических возмущений, т.е. при k(t) ifcconst. Но в этом случае необходимо при выборе значения Крори- ентироваться на максимальное из возможных значений коэффициента передачи канала регулирования. Кроме того, возникшая неопределенность дополнительно может быть учтена соответствующим снижением величи- ны настроечного коэффициента а. Все эти меры гарантируют устойчивость системы автоматического регулирования при воздействии параметрических возмущений, но в сра )
0
5
0
5
« 5
0 ,-
внении с предшествующим слушем значительно ухудшают точность регулирования. Чтобы не доспустить этого, в составе системы автоматического регулирования предусмотрен блок 19 адаптации, предназначенный для текущей подстройки коэффициента регулятора kf в соответствии с изменяющимся коэффициентом k передачи канала регулирования.
В блоке 19 адаптации подстройки коэффициента kp(t) осуществляется только при наличии существенного изменения сигнала U на входе объекта 2 управления, изменения, четко выделяющегося на фоне различного рода помех. Для этого приращения сигнала. U сравнивается с заданным значением . .Однако этого-недостаточно, чтобы принять решение о возможности оценки текущих значений k(t) и kp( t) на данном участке. Возможно, что значительное изменение U обусловлено необходимостью компенсации неконтролируемого возмущения и если на этом участке попытаться оценить k(t), можно получить оценки с любыми искажениями, вплоть до качественных (в знаке) ошибок. Чтобы избежать таких неприятностей дополнительно привлекается информация о так называемой инструментальной переменной. В роли такой переменной выступает приращение сигнала задания (не подтверженного каким-либо искажением) на соседних дискретных отсчетах .) ( tf) - ,). Решение о возможности подстройки k на очередном такте принимается, если существенному изменению сигнала U сопутствует не менее существенное изменение задающего сигнала, т.е. / S У Y .
При решении указанных задач в блоке 19 адаптации выполняются следующие операции.
Сигнал об усреднение значении регулирующего воздействия U(t) поступает с выхода первого фильтра 22 низкой частоты на .информационный вход пятого запоминающего блока 26, где в очередной дискретный момент времени lj запоминается на время дЬ при поступлении на управляющий вход пятого запоминающего блока 26 очередного тактового импульса с второго выхода ши- ротно-импульсного модулятора 4. В результате на выходе пятого запоминающего блока 26 формируется сигнал Ut, поступающий на вход седьмого блока 32 сравнения, где
вычитается из сигнала U(t). Сигнал о полученной разности 5U(t)U(t)-U подается через четвертый блок 39 задержки на информационный вход третьего интегратора 40 и на вход второго блока 38 определения модуля. В интеграторе 40 осуществляется интегрирование сигнала &U(t) на интервале времени между дискретными отсчетами tj
Ч
результате формируется сигнал SUU - 1
(t)
(е-«С)Ав
1
где -ф- - коэффициент
J U
скорости интегрирования, поступающий на вход блока 41 деления.
В начале очередного цикла интегрирования по очередному тактовому импульсу Етс второго выхода пшротно-импульсного модулятора 4, поступающему на управляющий вход третьего интегратора 40 через третий блок 29 задержки, производится установка нулевых начальных условий. Тактовый импульс задерживается в третьем блоке 29 задержки на время С запаздывания в канале регулирования. Одновременно в третьем компараторе 37 сигнал с выхода второго блока 38 определения модуля сравнивается с заданным значение SU mbl, сигнал о котором подается с выхода второго за- датчика 31. При выполнении условия 18 U (t)j
f U с выхода третьего компаратора 37 на управляющий вход второго ключа 44 поступает сиг-нал, открывающий этот ключ. В результате в следующий дискретный момент времени tj тактовый импульс Ет проходит через третий блок 29 задержки на выход второго ключа 44 и поступает на информационный вход первого ключа 35 как сигнал о наличии существенного изменения,регулирующего воздействия на данном такте управления.
Для этого сигнал Y(t) с выхода первого запоминающего блока 18 подается на вход четвертого блока 25 сравнения и на вход второго блока 21 задержки, где задерживается на интервал времени, равный интервалу дискретности itj. (дискретности поступления импульсов Ет). Сигнал Y(t-д) с выхода второго блока 21 задержки поступает на другой вход четвертого блока 25 сравнения, где вычитается из сигнала Yf(t). Полученный в результате сигнал ЈY(t)Y(t) - - Y(t- ) с выхода четвертого блока 25 сравнения поступает через первый блок 30 определения модуля на вход второго компаратора 36 в виде сигнала ( #Y(t)|, в котором сравнивается с сигналом , поступающим с выхода третьего задатчика 43. Если выполняется условие |ЈY(t)| то на выходе второго компаратора
36 формируется сигнал о наличии существен
10
15
20
25
30
35
ного изменения задающего воздействия, по-- ступающий на управляющий вход первого ключа 35. В соответствии с этим сигналом первый ключ 35 пропускает на свой выход поступивший на его информационный вход сигнал с выхода третьего компаратора 37. Таким образом, если выполняется условие существенного изменения регулирующего воздействия и задающего воздействия, то на выходе первого ключа 35 формируется сигнал, разрешающий расчет нового значения коэффициента регулятора k(t).
Для этого сигнал Y(t) с выхода первого датчика 12 подается на второй вход пятого блока 34 сравнения и на вход второго фильтра 24 низкой частоты, предназначенного для усреднения сигнала Y(t) на интервале A tj .
Сигнал об усредненном значении выхода Y(t) поступает с выхода второго фильтра 24 низкой частоты на информационный вход третьего запоминающего блока 29. На управляющий вход третьего запоминающего блока 29 поступают с выхода третьего блока 29 задержки тактовые импульсы Е«« с задержкой на время «С запаздывания в канале регулирования. В результате на выходе третьего запоминающего блока 29 с задержкой на время t после очередного момента времени td формируется сигнал Ye, поступающий на вход пятого блока сравнения, где вычитается из сигнала Y(t). Сигнал, о полученной разности oY(i) Y( t) - Yu подается на информационный вход второго интегратора 42, в котором осуществляется интегрирование сигнала fY(t) на интервале времени между дискретными моментами + Ј) и (ti+4 ).
В результате формируется сигнал
(V40
iY(t)-4-fr
J« -fcjtr
Y(6)de.
5
0
5
i
где -± 1ч
Этот блока 41
коэффициент скорости интегриро вания.
сигнал поступает на другой вход деления. В начале очередного цикла интегрирования по очередному тактовому импульсу Е, поступающему с второго выхода широтно-импульсного модулятора 4 через третий блок 29 задержки на управляющий вход второго интегратора, производится установка нулевых условий.
В блоке 41 деления сигнал ШЧ(1) делится на сигнал yYu(t). Получаемый в результате сигнал о расчетном значении коэффициента
krm Wvft) -ayrfe)
подается с выхода
блока 41 деления на вход шестого блока 33 сравнения, в котором из него вычитается сигнал k(t) о текущем рабочем значении этого коэффициента, поступающий с выхода четвертого запоминающего блока 20. Сигнал о полученной разности kЈ(t)-kr(t) с выхода шестого блока 33 сравнения через второй масштабирующий блок 27, в котором умножается на постоянный коэффициент 1, поступает на вход сумматора 23, в котором суммируется с сигналом k,(t), поступающим с выхода четвертого запоминающего блока. Полученный сигнал
KЈ(t)k(t)(t)-kp(t)
поступает на информационный вход четвертого запоминающего блока 20.
После очередного дискретного момента времени t +, , когда все переходные процессы завершились (именно с таким расчетом выбирается величина интервала дискретности AtL« 2 +3T) с задержкой в третьем блоке 29 задержки на управляющий вход четвертого запоминающего блока 20 с выхода первого ключа 35 поступает сигнал, разрешающий расчет нового значения коэффициента. В этот момент времени на выход четвертого запоминающего блока 20 и блока 41 деления сформированы сигналы о значениях kp и kf на предыдущем j-м такте управления, т.е. kp(t) и kЈ(tj). В четвертом запоминающем блоке 20 в этот момент производится запоминание нового, уточненного значения коэффициента для ijt1 -го такта
)kpp(tj)kp(.)+0((t(,-)--kf(
Структура этой формулы соответствует структуре экспоненциального сглаживателя.
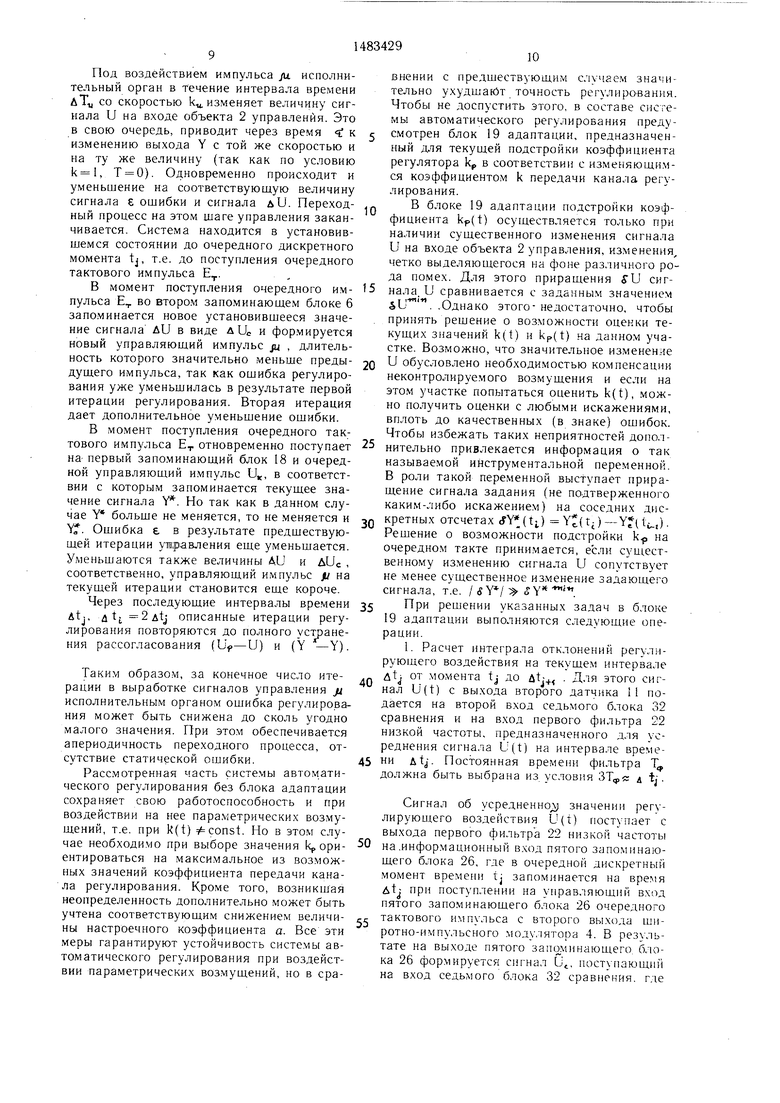
Таким образом, благодаря использованию шестого блока 33 сравнения, второго масштабирующего блока 27, сумматора 23 и четвертого запоминающего блока 20 осуществляется экспоненциальное сглаживание расчетных значений kp коэффициента регулятора и запоминание сглаженных значений в качестве уточненной оценки kf,(t) ко- эффициент регулятора Сигнал о величине этого коэффициента поступает на второй вход блока 16 умножения. Описанная динамика работы блока 19 адаптации иллюстрируется динамикой основных сигналов, отображенной в виде графиков на фиг. 3.
Формула изобретения
Система автоматического регулирования, содержащая последовательно соединенные исполнительный орган, объект управления и первый датчик, второй датчик, последовательно соединенные первый блок сравнения, блок умножения и второй блок сравнения,
5 д
5
0 0
5
5
,Q 5
0
$
первый блок задержки, причем первый вход первого блока сравнения подключен к выходу первого датчика, вход второго датчика подключен к выходу исполнительного органа, а выход второго датчика через первый блок задержки подключен к второму входу второго блока сравнения, отличающаяся тем; что, с целью повышения точности системы, она содержит первый запоминающий блок, последовательно соединенные третий блок сравнения, второй запоминающий блок, первый масштабирующий блок и широтно-им- пульсный модулятор, последовательно соединенные первый задатчик, первый компаратор и первый интегратор, последовательно соединенные второй блок задержки, четвертый блок сравнения, первый блок определения модуля, второй компаратор и первый ключ, последовательно соединенные третий блок задержки, третий запоминающий блок, пятый блок сравнения, второй интегратор, блок деления, шестой блок сравнения, второй масштабирующий блок, сумматор и четвертый запоминающий блок, последовательно соединенные первый фильтр низкой частоты, пятый запоминающий блок, седьмой блок сравнения, четвертый блок задержки и третий интегратор, последовательно соединенные второй задатчик, третий компаратор и второй ключ, третий задатчик, второй гфильтр низкой частоты и второг блок определения модуля, причем выход первого запоминающего блока соединен с вторым входом первого блока сравнения, с входом второго блока задержки и с вторым входом четвертого блока сравнения, управляющий вход первого запоминающего блока подключен к выход первого компаратора, первый и второй входы третьего блока сравнения подключены соответственно к выходу второго датчика и второго блока сравнения, выход первого интегратора подключен к втором} входу первого компаратора, первый выход широтно-импульсного модулятора подключен к входу исполнительного органа, второй выход соединен с управляющими входами второго и пятого запоминающих блоков, с информационным входом первого интегратора, а также через третий блок задержки с управляющими входами второго и третьего интеграторов и информационным входом второго ключа, выход второго датчика подключен к входу первого фильтра низкой частоты и второму входу седьмого блока сравнения, второй вход третьего компаратора через второй блок определения модуля соединен с выходом седьмого блока сравнения, выход третьего интегратора подключен к второму входу блока деления, выход второго ключа соединен с информационным входом первого ключа., выход которого соединен с управляющим входом четвертого запоминающего блока, выход которого подключен к вторым входам блока умножения, сумматора и шеетого блока сравнения, выход первого датчика подключен к второму входу пятого блока сравнения и через второй фильтр низкой частоты к информационному входу третьего запоминающего блока, выход третьего зау utj--2utj у
датчика подключен к второму входу второго компаратора, информационный вход первого запоминающего блока является входом системы, а выХод объекта управления является выходом системы.
I
(,«
fy
чпт i
fUm
ifrrr
fU с
| Турецкий X | |||
| Анализ и синтез систем управления с запаздыванием.-М.: Машиностроение, 1974, с | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
