1. - .
Изобретение относится к автоматическому регулированию уровней в емкостях (пульпосборниках) по притоку жидкости (гидросмеси) цз забоев гидрошахт и может быть использовано в многоступенчатых гидротранспортных перекачных системах, в гидротехнических сооружениях и системах водоснабжения для каскадного регулирования уровней гидросмеси или воды с целью обеспечения заданного среднего расхода при переменном случайном притоке на входах .в транспортную систему .
По основному авт.св. №723527 известно устройство для регулирования уровня жидкости в емкости, которое содержит датчик расхода, датчик уровня в емкости и задатчик верхнего и нижнего уровней, соединенные соответственно с первыми и вторыми входами первого элемента сравнения, выход которого соединен с блоком управления, связанным с регулирующим органом, а также усреднитель, задатчик расхода, второй элемент сравнения, корректор и блок прогноза, выход которого соединен с первым входом задатчика расхода, в торой вход которого через(усреднитель подсоединен к
выходу датчика расхода, а первый и второй входы второго элемента сравнения соединены соответственно с выходами усреднителя и задатчика расхода, а выход - с первым входом корректора, второй вход которого соединен с выходом датчика уровня, а выход - с третьим входом первого элемента сравнения 13
0
Однако при аварийных режимах, в случаях сбоев работы установок гидросистеАШ, резкого изменения условий выемки полезного ископаемого, появляется резко случайная непредсказьвае5мая составлякяцая при прогнозировании притока, снижающая точность прогноза (упреждения) и вызывающая погрешность регулирования среднего расхода только по прогнозному режиму
0 данным устройством.
Цель изобретения - повышение точности и надежности и, следовательно, повышение производительности гидро-транспортной системы путем введения
5 дополнительно корректирующего канала регулирования уставки уровня по текущему состоянию в транспортной системе о действительном притоке. Поставленная цель достигается
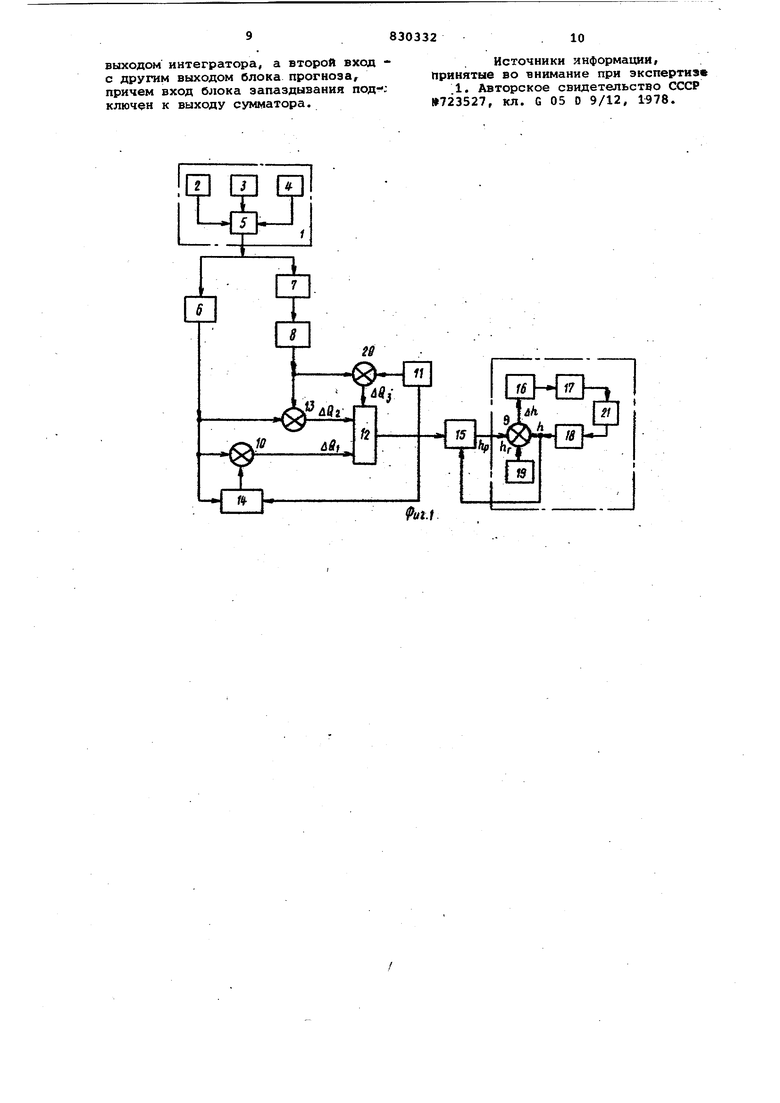
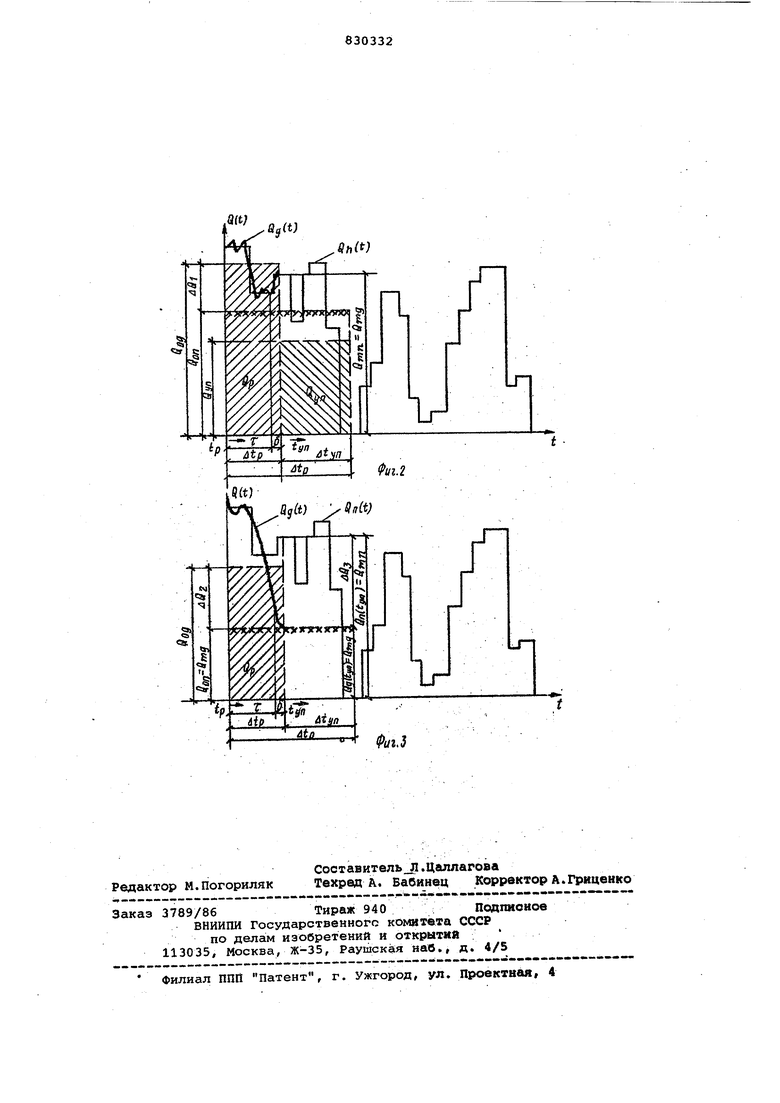
0 тем, что в устройство для регулиро- вания уровня жидкости в емкости, введены блок переключения режимов, последовательно соединенные блок запаздывания, интегратор и третий элемент сравнения, а также четвертый элемент сравнения, причем второй эле мент сравнения подключен к корректору через блок переключения режимов, -второй вход которого соединен с выхо дом четвертого элемента сравнения, второй вход третьего элемента сравне ния подключен к выходу усреднения, а выход - к третьему входу блока переключения режимов, первый вход четвертого элемента сравнения соединен с выходом интегратора, а второй вход - с другим выходом блока прогноза, причем вход блока запазды вания подключен к выходу сумматора. На фиг. 1 представлена блок-схем предлагаемого устройства на фиг. 2 - графики прогнозного и деист Еителыюго притоков и пояснения для формирования среднего опорного прито ка на расчетном интервале управления п прогнозному притоку в нормаль ном. режиме; на фиг. 3 - формировачие среднего опорного притока на расчет ном интервале по мгновенноьту действительному притоку при аварийном режиме . Устройство содержит датчик 1 рас хода, состоящий из датчиков 2-4 при токов, сумматор 5, усреднитель б, блок 7 запаздывания, интегратор 8, первый элемент 9 сравнения, второй элемент 10 сравнения, блок 11 прогно за, блок 12 переключения режимов, третий элемг нт 13 сравнения, задатчик 14 расхода, корректор 15, блок 16 управления, регулирующий орган 17, датчик 18,уровня в емкости, задатчик 19 верхнего и нижнего уров- . ней, четвертый элемент 20 сравнения пульпосборник 21. Устройство выполняется в виде от дельного блока и устанавливс.ется на перекачных ступенях гидротранспортной системы, сопрягаясь через допол нительные входы с локальной системо стабилизации уровня. Датчики притоков представляют со бой стандартные датчики расходов (уровней) гидросмеси в желобах и ра ботают на объемно-весовом принципе. Программный график составляется на основании статистических данных боты забоев или рассчитывается путе прогнозирования по предыстории процесса на расчетный интервал и закладывается в прогнозную модель 1 как программа работы. Расчетный интервал управления uto (см.фиг. 2 и 3) разбивается на два интервала: интервал регулирован Atp, за который инерционная система пульпосборников может быть переведе на из одного состояния по уровню в другое заранее по ожидаемому прогно ому или действительному притоку, интервал упреждения за который можно вычислить по программному графику прогноз притока гидросмеси ля компенсации отклонения его от среднего заданного притока, путем накопления или расходования заранее на интервале регулирования д tp запасов гидросмеси (уровней) в пульпосборниках в зависимости от того, ожидается увеличение или уменьшение прогнозного притока. Устройство работает следу1ощим обазом. Сигналы, пропорциональные действительному притоку, поступают непрерывно (либо периодически с фиксированной частотой опроса) от датчиков 2-4 на соответствующие входы сумматора 5, на выходе которого формируется сигнал, пропорциональный суммарному действительному притоку (ln,(t) на текущий момент времени t (фиг. 2 и 3), и поступающий одновременно для преобразования в основной и корректирующий каналы устройства. В основном канале по этому сигналу в усреднителе 6 вычисляется средний за интервал Т дейсвительный приток QOIJ- Интервал времени т численно равен времени движения гидросмеси от забоев по открытым каналам (желобам или трубам). Средний приток QOQ аккумулированный в транспортных желобах (трубах) и движущейся к пульпосборникам в течение времениtr , может быть точно определен на время Т вперед интегрированием текущего притока Qa(t) от датчиков, начиная с момента времени t /С . Приток принимается за . средний регулировочный приток QP (фиг. 2 и 3) на всем интервале регулирования fiktj, начиная с момента регулирования tp. Использование текущего действительного притока iQ(t) за время t для вычисления up на интервале регулирования utp значительно повышает точность работы устройства по сравнению с вычислением О.р на этом же интервале регулирования по программному графику (фиг. 2 и 3). В корректирующем канапе выходной сигнал сумматора 5 воспроизводится блоком 7 запаздывания только со сдвигом на время С . А дальше для устранения влияния высокочастотных помех в канапах связи на сигналы датчика 1 расхода и сглаживания пульсаций мгновенных значений сигнала притока Q,,(t), выходной сигнал блока 7 запаздывания усредняется интегратором 8, выполняющим роль сглаживающего фильтра, на небольшом интервале времени б . Причем интервал сГ выбран намного меньше интервала усреднения Т , т.е. («&. Таким образом, параллельно с формированием среднего регулировочного притока dp ка выходе усреднителя 6 основного канала, на выходе интегра тора 8 корректирующего канала форми руется сигнал, пропорциональный сум марному действительному мгновенному притоку (l(t) на момент времени , т«е. мо конца интервёша регулирования Д1р Г + (f , который поступает одновременно на входы элементов 13 и 20 сравнения. А сигнал, пропорциональный прогнозному мгновенному притоку, на тот же момент времени т.е. ) мП поступает с первого выхода 1блока И прогноза на второй вход элемента 20 сравнения, на выходе которого формируется сигнал отклоне ния действительного мгновенного при тока QwcjOT прогнозного мгновенного притока , и который поступает на управляющий вход логического блока 12 переключения режимов, определяя его работу. В нормальном режиме (фиг.2), ког да не наблюдается отклонений действ тельного притока (inCt) от прогнозно го O.n(t), в момент времени ц суммарный действительный мгновенный пр ток , поступающий с интегратора м мгновенный прогнозный приток от блока 11 прогноза - равны, и сиг нал отклонения u.Q на выходе элемен та 20 сравнения отсутствует, т.е. UMq QMH и 5мп- QMq О- При управляющем сигнале uQ нулевого (или близкого к нему) уровня блок 1 подключает основной канал на вычисление корректором 15 уставки по уровню в нормальном режиме. В этом случае сигнал, пропорциональный притоку Qp, поступает на пе вый вход задатчика 14 расхода, на второй вход которого со второго выхода блока 11 прогноза поступает сигнал за интервал упреждения сигнал, пропорциональный прогнозному тгритоку (, nporH03HpyeNbjfl с мо мента упрезкдения t на интервал (фиг.2) . По действительному регулировочно му притоку QP и прогнозному упрежденному притоку задатчике 14 расхода вычисляется среднесглаженный на расчетном интервале MQ « - dtp + At«jn опорный приток йоп« который при исправной работе устройствй численно равен заданному среднему расходу транспортной системы. Далее сигналы с выходов усреднителя 6 и задатчика 14 расхода, соответственно пропорциональные среднему действительному регулировочному притоку QP .и опорному притоку Q.QJ,, поступают соответственно на первый и второй входы.элемента 10 сравнения, на выходе которого формируется сигнал отклонения среднего действительного притока ftp от опорного притока Qon . При равенстве U p (ion сигнал отклонения uQ-f на выходе элемента 10 сравнения отсутствует, т.е. AQ « 0. В этом случае блок 16 управления поддерживает уровень в емкости (пульпосборнике) 21 в пределах верхнего и нижнего граничных его значений hj., установленных задатчиком 19 уровня. Так как на обоих интервалах, регулировочном &tp и прогнозном ut , одинаковые притоки Чр О.оп. система работает с расходом, близким к згщанному, и нет необходимости на интервале fitp, начиная с момента tp, накапливать или расходовать запас (уровень) жидкости (гидросмеси). В случае, если действительный приток dp на интервале &tp значнгельно превышает опорный на интервале Ato (когда ожидаемый приток мал) (фиг.2, на выходе элемента 10 сравнения появляется положительное значение сигнала отклонения &.Q Qp - Qon поступающее через соответствующий коммутирующий вход логического блока 12 переключения режимов на первый вход корректора 15, на второй ыход которого поступает текущий сигнал h с датчика 18 уровня, пропорциональный имеющемуся уровню в емкости (пульпосборнике) 21. По сигналам отклонения uQ. О и h в корректоре 15 вычисляется значение уставкн Ьр верхнего уровня для накопления запаса жидкости (.гидросмеси) в емкости пульпосборнике} , который своим выходом- подключен к корректирукицему входу элемента 9 сравнения, который связан с блоком 16 управления, управляющий регулирующим органом 17, установленном на сливе жидкости (гидросмеси) из емкости 16. Уставка верхнего уровня в пульпосборнике рассчитывается в этом случае таким образом, чтобы за интервал tp заранее к моменту t когда прогнозный притгок й станет малым и придется остановить систему, превышение действительного притока iQ над опорным (ion накапливается в виде запаса (уровня) в емкости (пульпосборнике) с тем, чтобы последуквдее время Мэд, начиная с , система так же работала при притоке, равном опорисмлу Чоп QNH Qf т.е. с заданным расходом. В случае, если действительный регулировочный приток (ip на интервале регулирования &.tp меньше опорного Qen рассчитанного для интервала ato (когда ожидаемьй прогнозный приток велик), после сравнения QpCij на выходе элемента 13 сравнения появляется отрицательное приращение Л(1, О, По сигналу Ad 0 и текущему сигналу уровня h аиалогичным образом, заранее, начиная с момента tp, корректором 15 вычисляется уставка hp нижнего уровня, и происходит опорожнение
требуемой части емкости (пульпосбориика) для приема излишков жидкости .(пульпы) величиной uQ на интервале упреждения , когда приток станет большим, а расход транспортной систенл по-прежнему должен оставаться равным среднему заданному. :
В аварийном режиме (фиг.З), когда наблюдаются резкие и большие оТклонения действительного притока Qtt(t) от прогнозного Q|,() (утечки или забутовки в желобах, порывы в водоводном ставе, снижение давления у монитора в забое и т.п.), в момент времени на выходе элемента 8 сравнения появляется сигнал отклонения мгновенного прогнозно1:о притока Qj( от мгновенного действительного Q,, т.е. uQ-3 Лмп- . по команде которого блок 12 отключает «основной канал и подключает корректирующий, переводя работу устройства на вычисление уставки по действующе|.у возмущению. .
В этом случае в качестве среднего прогнозного притока , « Q принимается мгновенный действительный приток Q/vvo. в момент , (фиг.З), так как наиболее вероятно, что сохраняется после момента t некоторое время равное до устранения неисправности в забоях или на транспортной линии (каналах)..
Действительный регулировочный приток Qp здесь вычисляется как обычно в нормальном режиме усреднителем 6, а среднесглаженный опорный приток йод теперь не вычисляется, потому что вместо него берется значение притока Q. выхода интегратора 8, поскольку интервал itp ДСупПоэтому сигнал мгновенного действительного притока 0,„, выполняющий роль опорного притока Qon на расчетном интервале управления бЛ,, сравнивается со средним действительным регулировочным притоком Qp в элемент 13 сравнения. При превышении притоком Qp величины притока Qpn. выходе элемента 13 сравнения по ляется сигнгш отклонения О. Qp - « , который через соответствующий коммутирующий вход блока 12 поступает на первый вход корректора 15. По сигналам отклонения AQ. и текущего уровня h в корректоре 15 вычисляется уставка-настройка Hav аварийный режим по притоку повысаения уровня за интервал &tp и накопления запаса жидкости (пулыш) в емкости, заранее к моменту t прихода мал©го действительного притока, равного оп последующее время расход в транспортной системе сохранился равным опорному, т.е. заданному расходу.
При устранении неиспрадности в забоях или на транспортном участке и совпадений действительного притока
с программным притоком Q сигнал отклонения лЦ ) на выходе элемента 9 сравнения станет равным нулю и блок 12 отключает корректирующий канал и вновь подключает основной канал на вычисление уставки в нормальном режиме по программе, описанной вьвие.
Таким образом, от начала включения устройства регулирования уровня в работе, оно управляет запасами гидросмеси (уровнями) по притоку, заранее .вычисляя на повышение уровня если ожидается (прогнозируется) падение притока, и на понижение, если ожидается его увеличение, обеспечивая этим самым с достаточной точностью сглаживание колебаний притока гидросмеси и непрерывный заданный расход в гидросистеме.
В многоступенчатых гидротранспортных системах и системах водоснабжения устройства регулирования уровня включаются по каскадной схеме, когда расход предыдущей ступени является притоком к последующей, а устройство выполняет функции, аналогичные описанным.
Использование в устройстве корректирующего канала для вычисления уставки уровня повышает точность реглирования уровня и заданного расхода в системе, так как снижает составляющие погрешности, обусловленные влиянием трудно предсказываемых ПРИТОКОВ, вызванных сбоями и аварийными явлениями. В результате снижаются дополнительные затраты энергии, на стабилизацию колебаний расхода в гидросистеме. Кроме того, система в целом обеспечивается инвариантностью (с точностью до ошибки преобразования сигнала: t- инвариантность) по возмущению, что увеличивает сферу использования устройства.
Формула изобретения
Устройство для регулирования уровня жидкости вёмкости по авт.св. 9723527, отличающееся тем, ЧТО , с целью повышения точности и нгщежности устройства, оно содержит блок переключения режимов, последовательно соединенные блок запазда вания, интегратор и т ретий элемент сравнения, а также четвертый элемент сравнения, причем второй элемент сравнения подключен к корректору через блок переключения режимов, второй вход которого соединен с выходом четвертого элемента сравнения, второй вход третьего элемента сравнения .подключен к выходу усреднителя, а выход - к третьему входу блока переключения режимов, первый вход четвертого элемента сравнения соединен с
выходом интегратора, а второй вход с другим выходом блока прогноза, причем вход блока запаздывания под-; ключен к выходу сумматора.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР №123521, кл. G 05 О 9/12, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования уровня жидкости в емкости | 1978 |
|
SU723527A1 |
| Устройство для контроля и управления насосной установкой гидротранспортной системы | 1980 |
|
SU882895A2 |
| Система регулирования уровня жидкости в емкости | 1985 |
|
SU1291936A1 |
| Способ регулирования процесса бурения и устройство для его осуществления | 1983 |
|
SU1143832A1 |
| Система регулирования уровня воды в бьефе оросительного канала | 1985 |
|
SU1357928A1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ ГАЗОРЕДУЦИРУЮЩИЙ ПУНКТ С ФИКСАЦИЕЙ ПОТЕРЬ ГАЗА | 2024 |
|
RU2825284C1 |
| Устройство для управления гидроподъемной системой | 1989 |
|
SU1655886A1 |
| Адаптивная система управления | 1983 |
|
SU1174903A1 |
| Устройство для автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта | 1981 |
|
SU1000359A2 |
| Устройство автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта | 1979 |
|
SU787311A1 |
2 3 U
5
Фаг,3
