15
20
Р1зобрете.ние относится к машиностроению и может быть применено в конструкциях различных -самоходных машин.
Цель изобретения - расширение диапазона бесступенчатого регулирования скорости движения машины, упрощение конструкции трансмиссии и управления машиной,
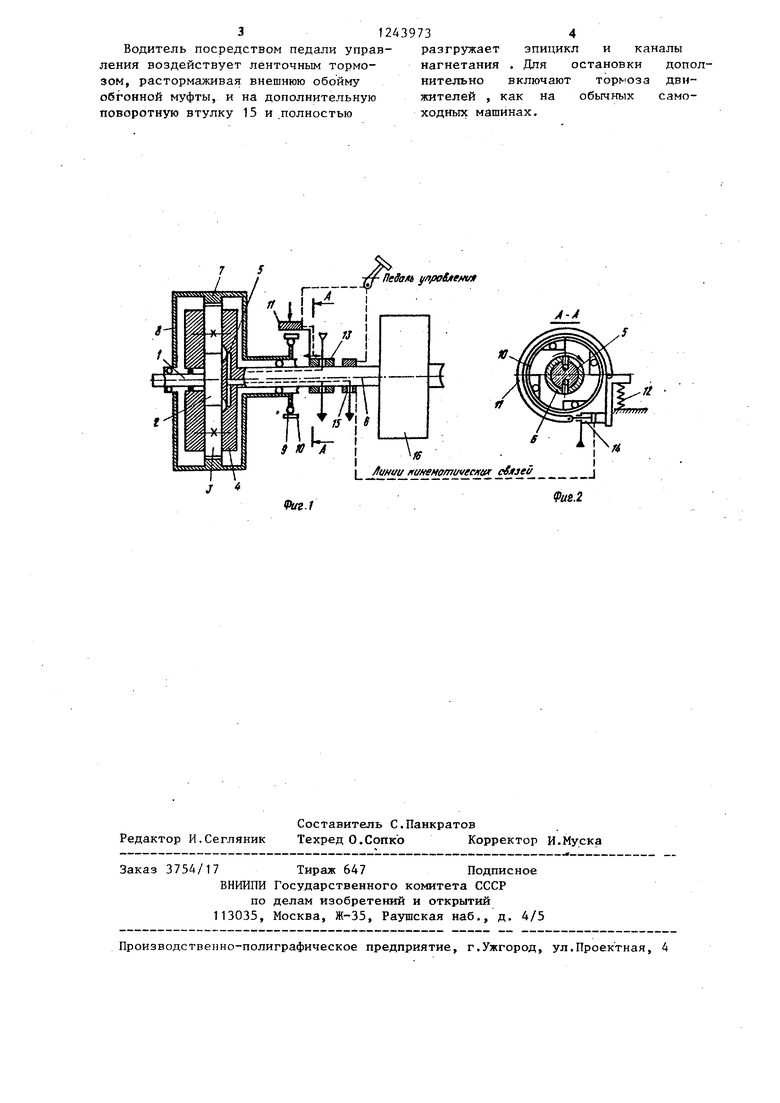
На фиг.1 цредставлена кинематичес- ,Q кая схема трансмиссии; на фиг,2 - разрез А-А на фиг,1.
Входной вал 1 жестко соединен с солнечной шестерней 2, которая вместе с сателлитами 3 помещена в пазы корпуса -. водила 4, снабженного каналами 5 нагнетания, выполненными также в выходном валу 6, жестко соединенным с водилом 4. Эпициклическое коле- jCo 7 выполнено заодно с кожухом 8 и установлено на обгонной муфте 9, на внешней обойме 10 которой установлен в свою очередь, ленточньш тормоз 11. С упругим элементом 12 установлена на выходном валу поворотная дроссель- .ная втулка 13, кинематически соеди- ненная с ленточным тормозом 11, При вод 14 ленточного тормоза 11 и педаль управления кинематически раздельно соединены с дополнительной поворотной дроссельной втулкой 15, также установленной на входном валу 6 и соединены с реверс-редуктором 16, Устройство работает следуюшдм образом.
При.стоянке самоходной машины, Вращение вала двигателя через входной вал 1 трансмиссии передается солнечной шестерне 2 и сателлитам 3, Эпи1щклическое колесо 7 при этом рас- торможивается, т,е, ленточньй тормоз 11 отпущен и не контактирует с. внешней -обоймой 10 обгонной муфты 9. За счет этого вращение сателлитов 3 приводит в противоположное вращение эпициклическое колесо 7, а корпус води- па 4 с выходным валом 6 остается неподвижным. Создаваемый сателлитами 3 и солнечной шестерней 2 расход рабочей жидкости, заполнившей объем, огг раниченный кожухом 8 и эпициклическим колесом 7, поступает по каналам 5 нагнетания свободно на слив через дополнительную поворотную втулку 15. При трогании с места. Водитель постепенно включает ленточный тормоз 11 и, притормаживая внешнюю обойму 10 обгонной муфты 9, одновременно тем самым замедляет вра2439732
щение эпициклического колеса 7. При
этом начинает постепенно вращаться в одну сторону с солнечной шестерней .2 и корпз с-водило 4 и выходной вал 6, При полностью остановленном эпициклическом колесе 7 передаточное отношение трансмиссии равно расчетному, oпpe.дeлeннolsfy геометрическими параметрами планетарного редуктора, образованного звеньями 2, 3 и 7, За счет кинематической связи привода ленточного тормоза с дополнительной втулкой последняя при полностью выключенном тормозе полностью перекроет свободный слив рабочей жидкости. При перекрытии сззободно о слива в каналах нагнетания начнет расти давление рабочей ;«идкости.
Поступательное движение самоходной машины.
Одновременно с торможением эпициклического колеса и началом движения машины на эпициклическом колесе начнет расти реакция от момента сопро- 25 тивления движению машины. Эта реакция будет воспринята через внешнюю обойму обгонной муфты ленточным тормозЪм и |/пругим элементом 12, З.а счет кинема- тической связи последнего с поворотной дроссельной втулкой произойдет автоматическое регулирование величины дросселирования рабочей жидкости, а следовательно скорости вращения сателлитов и соответственно водила с выходным валом. При большом сопротивлении движения мапгины, равном номинальному моменту двигателя, каналы нагнетания полностью открыты и передаточное отношение трансмиссии максимально. При уменьшении сопротивления движению машины реакция на упругом элементе соответственно уменьшится, а поворотная дроссельная втулка за счет перемещения уменьшит проходные сечения каналов нагнетания вплоть до их полно1 0 перекрытия, В результате передаточное число трансмиссии станет минимальны , а скорость движения максимальной.
30
35
40
45
50
55
Таким образом, во всем диапазоне передаточных отношений существует кинематическая связь деформации упругого элемента или угла закручивания ленточного тормоза и поворотной дроссельной втулки. Эта связь осущест-- вляется без участия водителя.
При остановке самоходной машины, движущейся по инерции.
Таким образом, во всем диапазоне передаточных отношений существует кинематическая связь деформации упругого элемента или угла закручивания ленточного тормоза и поворотной дроссельной втулки. Эта связь осущест-- вляется без участия водителя.
При остановке самоходной машины, движущейся по инерции.
Водитель посредством педали управления воздействует ленточным тормозом, растормаживая внешнюю обойму обгонной муфты, и на дополнительную поворотную втулку 15 и .полностью
разгружает эпицикл и каналы нагнетания . Для остановки дополнительно включают TopNio3a движителей
как на обычных самоходных машинах.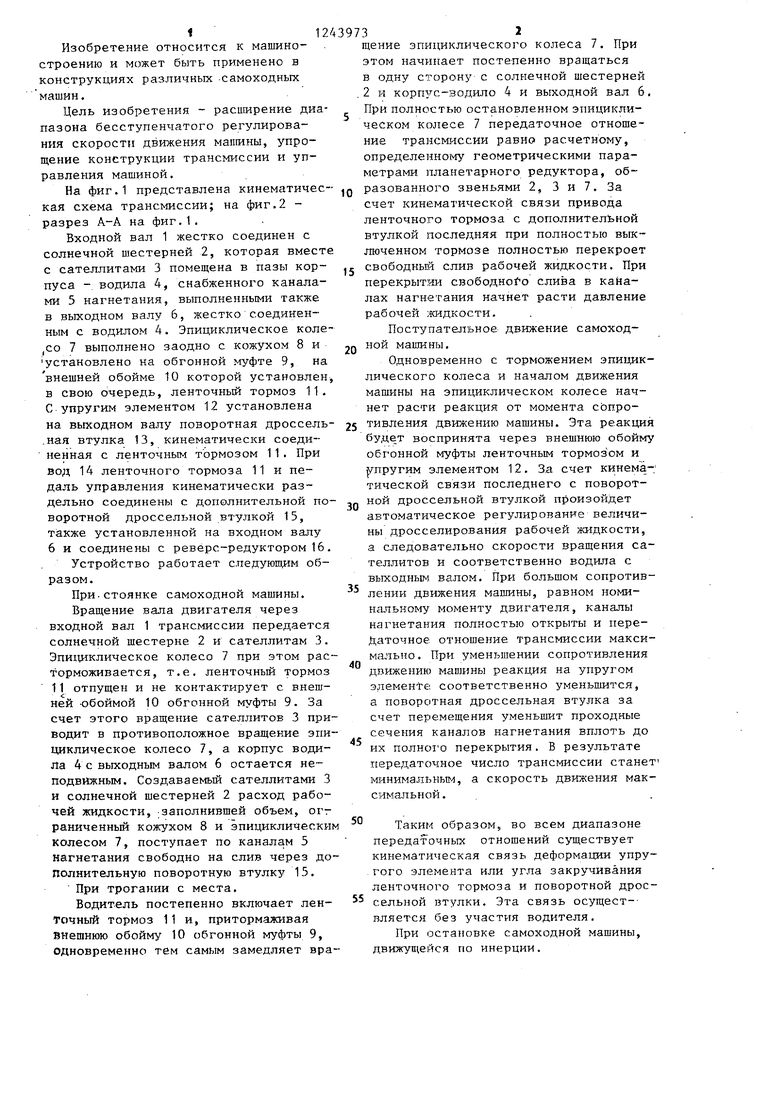
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропланетарный реверсивный бесступенчатый модуль транспортного средства | 1982 |
|
SU1134417A1 |
| Гидропланетарный вариатор скорости | 1983 |
|
SU1184703A1 |
| Бесступенчатый автоматический планетарный модуль | 1981 |
|
SU1081375A1 |
| Трансмиссия транспортного средства | 1987 |
|
SU1495149A1 |
| Гидромеханический вариатор скорости | 1983 |
|
SU1224189A2 |
| ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ ПРЕИМУЩЕСТВЕННО СЕЛЬСКОХОЗЯЙСТВЕННОГО НАЗНАЧЕНИЯ | 1994 |
|
RU2041583C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2297926C1 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| МНОГОСТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ ТРАНСМИССИЯ | 2013 |
|
RU2598469C2 |
| Гидрообъемная бесступенчатая передача транспортного средства | 1983 |
|
SU1094763A1 |
J
%г.Л
ПеЗат упроблени
А-А
S
L fUtyLf- y y ..I
Ри&2
Редактор И.Сегляник
Составитель С.Панкратов
Техред О.Сопко Корректор И.Муска
Заказ 3754/17 Тираж 647Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Бесступенчатый автоматический планетарный модуль | 1981 |
|
SU1081375A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
