1
Изобретение относится к 1 орнодо- бывающей промышленности и может найти имрокое применение, например,
j
в приводах мощных карьерных экскаваторов и врубовых машин.
Целью изобретения является повышение быстродействия и помехозащищенности следящей системы.
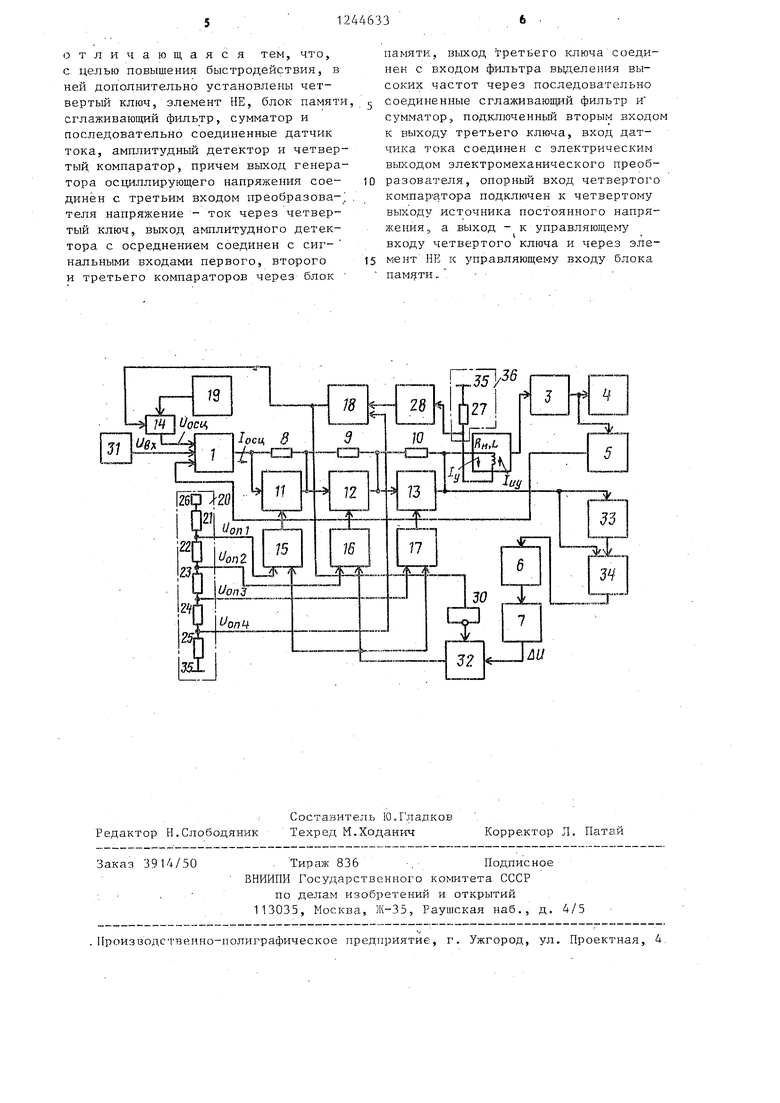
На чертеже представлена блок-схема предлагаемой системы.
Состема содержит преобразователь напряжение - ток 1, электромеханический преобразователь 2, гидродвигатель с гидроусилителем 3, нагрузкой 4, датчик 5 обратной связи, фильтр 6 выделения высоких частот, амплитудный детектор 7 с осреднением, первый - третий резисторы 8-10, первый - четвертью ключи 11-14, первый - четвертый компараторы 15-18, генератор 19 осциллирующего напряжения, источник 20 постоянного напряжения, резисторы 21-25, источник 26 питания, резистор 27, амплитудный детектор 28, обмотку 29 управления, элемент НЕ 30, задат чик 31, блок 32 памяти,- сглаживающий фильтр 33, сумматор. 34., общую шину 35, датчик 36 тока.
На чертеже приняты следуЕощие обозначения, - выходной сигнал задатчика 31, который к тому же является входным сигналом системы.
Li
Ощ
выходной сигнал четвертого
ключа 14, Здрц,- выходной сигнал пре- образователя напряжение - ток 1,
сс,, . , U,, , Up,- выходные сигналы источника 20 постоянного напряжения, &U - выходной сигнал амплитудного детектора 7 с осреднением, t)y - ток управления, R ,L параметры обмотки 29 управления.
В состав датчика 36 тока входят. резистор 27 и общая шина 35.
В состав источника 20 постоянного напряжения входят резисторы 21-25, общая шина 35 и источник 26 питания.
Система работает следуюЕЩм образом.
Под действием входного сигнала
и
ftx
с выхода задатчика 31 в обмотке
29 управления образуется ток С/ц управления.
Гидродвигатель с гидроусилителем 3, нагрузкой 4 начинает отрабатывать входрюй сигнал U,, , а датчик 5 обратной связи путем подачи сигнала на вход преобразователя напря446332
жение - ток 1 компенсируется выходной сигнал Ug задатчика 31.
В исходном положении на третий вход преобразователя напряжение - г ток 1 с генератора 19 осциллирующего напряжения через нормально замкнутые контакты ключа 14 поступает синусоидальное, напряжение относительно общей шины 35, частота кото- 10 рого значительно превышает частоту задающего .напряжения U с выхода задатчика 31. Амплитуда осциллирующего тока осц в обмотке 29 управления электромеханического преобра- г зователя 2 обычно составляет малую часть от м.аксимального тока Зу, управления, т.е. С/, 0,1 Jy,, что обычно эквивалентно изменению выходной координаты системы в пре- 20 делах зоны нечувствительности 0,1 градуса.
В процессе работы-системы происходит разогрев рабочей жидкости и, следовательно, изменение сопротив- 25 ления обмотки 29 управления электромеханического преобразователя 2, которая, как п равило, выполняется медным проводом. В связи с тем, что преобразователь напряжение - ток 1 2д поддерживает амплитуду тока в обмотке 29 управления неизменной, то изменение осциллирующего напряжения пропорционально изменению температуры рабочей жидкости в гидро- двигатепе с гидроусилителем 3, следовательно, изменению сопротивления обмотки 29 управления. Изменение осциллирующего напряжения подавляется сглаживаю1цим фильтром 33, пропускается сумматором 34, вьщеляется с помощью фильтра 6 выделения высоких частот и амплитудного детектора 7 с осреднением, так что на его выходе образуется медленно меняющееся напряжение ди , пропорциональное изменению сопротивления обмотки 29 управления.
Напряжемие Д U с выхода амплитудного детектора 7 с осреднением поступает на сигнальный вход блока 32 памяти и передается на его выход. С выхода блока 32 памяти напряжение ,sU поступает на сигнальные входы компараторов 15-17, причем на опорные входы последних с резис- 5 торов 21-23 поступают сигналы U , и , Ujpp. с источника 20 постоянного напряжения. При &U и , оп-г ьп:5 последовательно срабаты35
40
45
SO
3
вают компараторы 15-17 н своими вь.- ходами напряжениями включают ключи 11-13. В свою очередь сигнальные входы и выходы ключей шунтируют последовательно соединенные резисторы 8-10. Таким образом, в процессе разогрева обмотки 29 управления сопротивление нагрузки преобразователя напряжение - ток 1 остается практически неизменным и равным сопротивлению обмотки 29 управления в нагретом состоянии. При возрастании амплитуды выходного сигнала Ug задатчика 31 через обмотку 29 управления, датчик 36 тока протекает
ток управления, близкий к J.
УЧмак
Выходной сигнал датчика 36 тока
детектируется амплитудным детект о- .ром 28 и поступает на сигнальный вход четвертого компаратора 18, на опорный вход которого поступает напряжение с четвертого выхода источника 20 постоянного напряжения. Опорное напряжение выбирается такой величины, чтобы срабатывание четвертого компаратора 18 пвоисхо- дило при достижении током С с управления максимальной величины (обычно ,). ,
При достижений током Лу управления величины, большей 0,7 7умо)ц.с-; срабатывает четвертый компаратор 18 и своим выходным напряжением закрывает ключ 14 и тем самым от входа системы отключается осциллирующий сигн ал Uocy высокой частоты, вызывающий дополнительный непроизводительный расход рабочей жидкости. При дальнейшем увеличении входного сигнала Ug, системы вся производительность насосной ст анции расходуется на увеличение скорости отработки системой входного сигнала, т.е. повышается быстродействие системы при отработке максимальных выходных сигналов задатчика, не- менее, чем на 25%. Чтобы не нарушилась работа системы после отключения напряжения осцилляции, сигнал с выхода компаратора 18 через элемент НЕ 30 поступает на вход управления блока 32 памяти, переводя его в режим запоминания величины aU на выходе на период отключения напряжения осцилляции.
При наличии медленно меняющегося тока у управления системы и быстроменяющегося осциллирующего напря446334
ГКеНИЯ в ОбмоТ 2 уп;:ч :):
деляется напряжение управления и высокочастотного напряжеьшя. Сумма этих напряжений подается на сглажи- J ваю1ций фильтр 33 и после сглаяшвания
подается на первый вход сумматора 34, на первый вход которого подается сумма иапрялсений. В сумматоре 34 происходит вычитание сглаженного )Q и суммарного напряжений. Амплитуда чг1стоты сигнала управления на выходе сум1 атора 34 в 2 и более раз ниже, чем непосредственно на обмотке 29 управления. Таким образом, ,2 на вход фильтра 6 выделения высоких частот поступает сигнал, в котором существенно снижена помеха от влияния амплитуды рабочего сигна.па управления системы и тем самым повы- 2Q шается ее помехозащищенность в 2 и более раз. Под действием выходного сигнала задатчика 31 в.обмотке 29 управл.ения образуется ток С/у управления и.гидродвигатель с гидро- усилителем З с нагрузкой 4 начинает отрабатывать этот сигнал, а датчик 5 обратной связи путем подачи сигнала на вход преобразователя 1 компенсирует выходной сигнал задатчика 31.
Применение предлагаемой следящей системы позволяет повысить быстродействие системы при отработке сигналов задания на 25% без дополнительного расхода рабочей жидкости, что приводит к повышению эффективности работы системы, например, при управлении подвижных объектов. Кроме того, в 2 и более раз повыша- , ется помехозащищенность системы за счет предварительной отработки информационного сигнала, снимаемого с обмотки управления, что приводит к повышени д надежности и точности
системы и к исключению ложных сра45 оатывании в системе.
В связи с тем, что быстродействие в предлагаемой системе обеспечивается при меньшем расходе рабочей 50 жидкости, чем в прототипе, то в ней могут быть установлены гидродвигатели с меньпшми массогабаритными характеристиками и более низкой стоимостью.
55
Формула изобретения
Электрогидравлическая следящая система по авт.св. № 1149212,
30
40
отличающаяся тем, что, с целью повышения быстродействия, в ней дополнительно установлены четвертый ключ, элемент НЕ, блок памяти сглаживаюЕ ий фильтр, сумматор и последовательно соединенные датчик тока, амплитудный детектор и четвертый компаратор, причем выход генератора осциллирующего напряжения соединен с третьим входом преобразова- ; теля напряжение - ток через четвертый ключ, выход амплитудного детектора с осреднением соединен с сиг- напьными входами первого, второго и третьего компараторов через блок
памяти;, выход третьего ключа соединен с входом фильтра выделения высоких частот через последовательно
соединенные сглаживающий фильтр и сумматор,, подключенный вторым входом к выходу третьего ключа, вход датчика тока соединен с электрическим выходом электромеханического преобразователя, опорный вход четвертого компаратора подключен к четвертому выходу источника постоянного напряжения,, а выход - к yпpaвляющe ry входу четвертого ключа и через элемент НЕ к управляющему входу блока памяти„ 

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая следящая система | 1986 |
|
SU1405024A1 |
| Электрогидравлическая следящая система | 1986 |
|
SU1363133A1 |
| Электрогидравлическая следящаяСиСТЕМА | 1979 |
|
SU849134A1 |
| Электрогидравлическая следящая система | 1983 |
|
SU1149212A1 |
| Устройство для каротажа скважин | 1979 |
|
SU851309A1 |
| Источник сейсмических сигналов | 1990 |
|
SU1817052A1 |
| Электрогидравлическая следящая система | 1988 |
|
SU1509827A1 |
| Устройство для контроля электрических параметров полупроводниковых диодов | 1983 |
|
SU1138768A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ В ЦИФРОВОЙ КОД ОТКЛОНЕНИЯ | 1992 |
|
RU2074396C1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1984 |
|
SU1240649A1 |
Система относится к области горнодобывающей промыпшенности,может найти широкое применение в приводах мощных экскаваторов и врубовых машин и является усовершенствованием известной системы по авт.св. № 1149212. В системе решается задача компенса- ции влияния изменения сопротивления обмотки управления электромеханического преобразователя, возникающего из-за изменения температуры рабочей жидкости в процессе работы системы. .-В процессе работы системы сигнал задания сравнивается с текущим поло,.жением вала гидроусилителя в преобразователе напряжение - ток, на выходе, которого формируется сигнал рассогласования в виде тока управления. Этот ток.через последовательно соединенные резисторы поступает на обмотку управления электромеханического преобразователя. Последний .воздействует на гидродвигатель с гидроусилителем, меняя положение нагрузки на валу гидродвигателя. Кроме того, на третий вход преобразователя напряжение - ток с выхода генератора осциллирующего напряжения через ключ поступает напряжение, частота которого значительно превышает частоту сигнала задания. На выходе преобразователя это напря- .жение вызывает появление осциллирующего тока, величина которого постоянна и не превышает десяти тгроцен- тов от максимальной величины тока управления. Изменение сопрот ивления обмотки управления вызывает изменение осциллирующего напряжения на входе электромеханического преобразователя . Осциллирующее напряжение суммируется со сглаженным осциллирующим напряжением, пропускается через фильтр высоких частот и амплитудный детектор с осреднением, на выходе.которого формируется напряжение, пропорциональное изменению сопротивления обмотки управления. Это напряжение запоминается в блоке памяти, выходной сигнал которого- поступает на сигнальные входы компараторов, на опорные входы которых .по- ст9 пают выходные напряжения источника постоянного напряжения. При срабатывании компараторы формируют сигналы управления ключами, шунти- .рующими последовательно соединенные резисторы. Ток, протекающий по обмотке управления, детектируется амплитудным детектором. Его выходной сигнал сравнивается в компараторе с опорным напряжением. Выходной сиг- нал этого компаратора управляет ключом, установленным на выходе генератора осциллирующего напряжения, а также инвертируется и поступает на управляющий вход блока памяти. 1 ил. i СО ю О) ее со N
281
-tП
35 У
36
30
6 I
Составитель 10.Г,падков Редактор Н.Слободяник Техред М.Ходанич
Заказ 3914/50
Тираж 836 . Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Л. Патаи
| Электрогидравлическая следящая система | 1983 |
|
SU1149212A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
