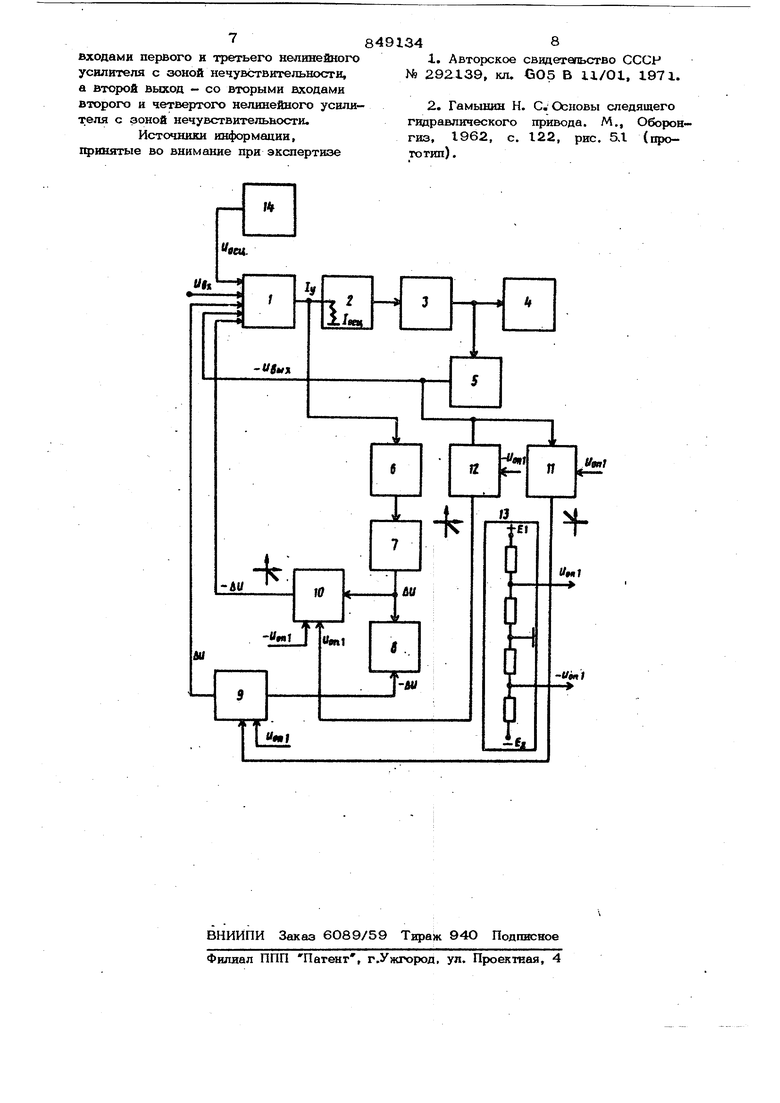
3846 Нодостатком этого устройства является температурная нестабильность характеристик (скорости отработки задающего сигнала, переходного процесса, частотных характеристик, быстродействия), вызванная зависимостью скоростной характеристи ки гидродвигателя при постоянном входном токе управления от температуры рабочей жидкости в гидродвигателе. В связи с тем, что рабочая жидкость в исполнительном гидродвигателе с гидроусилителем, как правило , циркулирует в замкнутом ограниченном объеме и гидродвигфтель подвергается воздействию высоких температур, например, при управлении рулями летательных аппаратов, его скоростная характеристика может изменяться в значительных пределах (в два и более раза). Кроме того, постоянная времени обмотки управления электромеханического преобразователя, величина которой зависит от внутреннего сопротивления усилителя в рассматриваемой следящей системе, значительно ухудшает ее быстродействие, так как она практически не компенсирует- ся из-за низкого выходного сопротивления усилителя. Все это ограничивает применение рассматриваемой следящей системы в высокочастотных быстродействующих системах автоматического управления машинами и аппаратами. Цель изобретения - повышение точности электрогидравлической следящей системы. Указанная цель достигается тем, что система содержит последовательно соединенные фильтр выделения высокой частоты, амплитудный детектор с усреднением, инвертор и первый нелинейный усилитель с зоной нечувствительности, а также источник опорного напряжения и второй, третий и четвертый нелинейные усилители с зоной нечувствительности, причем вход фильтра вьщеления высокой частоты сое динен с выходом преобразователя напряже ние-ток, выходы первого и второго нелинейного усилителя с зоной нечувствительности соединены, соответственно, с четвертым и пятым входами преобразователя нафяжение-ток, а ключевые входы - с выходами третьего и четвертого нелинейного усилителя с зоной нечувствительности, входы которых соединены с вькодом датчика обратной связи, вход второго нелинейного усилителя с зоной нечувс вительности соединен со входом HHBepnTop выход источника опорного нащзя- жения соединен со вторыми входами пер- вого И третьего нелинейного усилителя с зоной нечувствительности, а второй выход - со Вторыми входами второго и четвертого нелинейного усилителя с зоной нечувствительности. На чертеже представлена блок- хема предлагаемого устройства. Оно состоит из преобразователя 1 напряжение-ток, электромеханического преобразователя 2, гидрсдвигателя с гидроусилителем 3, нагрузки 4, датчика 5 обратной связи, фильтра 6 вьщеления высоких частот, амплитудного детектора 7. с усреднением инвертора 8, нелинейных , усилителей 9 - 12 с зоной нечувствительности, источника 13 опорного напряжения, генератора 14 осциллирующих колебаний. Предлагаемое устройство работает следующим образом. В исходном положении на вход щзеобразователя 1 напряжение-ток с генератора 14 осциллирующих колебаний поступает синусоидальный сигнал U частота которого значительно превышает частоту рабочего сигнала UBX а амплитуда тока осциллирующего сигнала 1осцВ обмотке управления электромеханического преобразователя 2. обычно составляет часть от максимального тока управления 1 -макс В процессе 0,1 I .макс работы устройства происходит разогрев рабочей жидкости и, следовательно, изменение сопротивления обмотки управления электромеханического преобразователя 2, которая, как правило, выполняется медным проводом. В связи с тем, что преобразователь 1 напряжение-ток поддерживает амплитуду тока1осцв обмотке управления электромеханического преобразователя 2 неизменной, то измененж напряжения осциллирующего сигнала пропфционально изменению температуры рабочей жидкости в гидродвигателе и, следовательно, изменение его скоростной характеристики. Изменение напряжения осциллирующего сигнала выделяется с помощью фильтра 6 вьщеления высоких частот и амплитудного детектора с усреднением 7, так что на его выходе образуется медленноменяющееся напряжение ДУ , пропорциональное зависимости скоростной характеристики гидродвигателя от температуры рабочей жидкости. Нелинейные усилители 9 - 12 с зоной нечувствительности пропускают сигналы одной полярности, приче м блоки 9 и 11 пропускают отрицательно сигналы, а блоки 1О и 12 - положительные сигналы. Опорные напряжения + Uon i поступающи с источника 13 опорных напряжений, подключены ко вторым входам блоков 9 - 12 и выбраны такой величины, чтобы при отсутствии входного эти блоки не реагировали на случайны флуктуирующие сигналы в зоне нечувствительности устройства. Кроме того, блоки 9 и Ю имеют ключевые входы, гфи подаче сигнала на которые эти блоки, запираются. Бло кн 9-12 инвертируют входной сигнал. При наличии входного сигнала положительной полярности + и вх и выходе дат чика обратной связи образуется сигнал отрицательной полярности -Uewx ходе блока 12 сигнал (Jon i закрывающий ключ Ю, отсутствует и с выхода детектора 7 компенсирующее напряжение ДО проходит через блок Ю на вход преобразователя 1 напряжение- гок, при этом изменяется его коэффициент передачи и уменьщается управления Х таким образом, что сохраняется скоростная характеристика гидродвигателя неизменной Следовательно, неизменным сохраняется и коэффициент добротности следящей сиотемы, что свидетельствует о температурной стабильности харак;теристик устройства. Кроме того, высокое выходное сопротйвление преобразователя 1 напряжение- ток резко снижает и стабилизирует постоя ную времени обмотки управления электро механического преобразователя 2, при этом повышается быстродействие устройст ва. На выходе ключа 11 присутствует который закрывает блок 9 сигнал и компенсирующее напряжение Л U с выхода инвертора 8 не проходит на вход преобразователя 1 напряжение- ок. При подачена взсод устройства сигнала огрица-. тельной полярности - UBX на выходе датчика обратной связи 5 образуется сигнал положительной полярности + Upt,iX который поступает на входы ключей 11 и 12. В этом случае на выходе блока 12 образуется сигнал - Ирп который закрывает блок Ю к компенсирующее напряжение не поступает на вход преобра зователя 1 напряжение-ток. В то же время сигнал с выхода ключа 11 не поступает на ключевой вход блока и компенсирующе напряжение - iU с инвертора 8 через блок 9 поступает на вход преобразователя 1 напряжение-ток, компенсируя изменение скоростной характеристики гидродвигателя Элементы предлагаемого устройства, также как преофазователь напряжени& ток, амплитудный детектор, нелинейные усилители с зоной нечувствительности, инвертор, фильтр выделения высокой частоты могут быть выполнены на единой микросхемной элементной базе, в частности, на интегральных операционных усилителях. По сравнению с известным устройством в предлагаемой электрогидравлической следящей системе повыщена температурная стабильность в связи с введением сигнала на вход преобразователя напряжение-ток, компенсирующего изменение скоростной характеристики гидродвигателя при разогреве рабочей жидкости, и быстродействие за счет высокого внутреш1его сощ)отивления преобразователя напряже- . Все это позволяет повысить точность устройства и использовать его в высокочастотных ароматических системах управления мащинами и аппаратами. Кроме ТОГО, применение единой микроэлектронной базы посволяет повысить .уровень микроминиатюризации устройства. Формула изобретения Электрогидравлическая следящая система, содержащая последовательно соединенные генератор осциллирующего сигнала, тфеобразователь напряжение-ток, электромеханический преобразователь, гидродви- гатель с гидроусилителем, датчик обратной свяизи, выход которого соединен со вторь{М входом преобразователя напряжение- гок, третий вход которого соединен со входом системы, отличающаяся тем, что, с целью повышения точности, система содержит последовательно соединенные фильтр вьщеления высокой частоты, амплитудный детектор с усреднением, инвертор и первый нелинейный усилитель с зоной нечувствительности, а также источник опорного на1фяжения и второй, треткй и четвертый нелинейные усилители с зоной нечувствительности, причем вход фильтра вьщеления высокой частоты соединен с выходом преобразсватегш напряжение- ок, выходы первого и второго нелинейного усилителя с зоной нечувствительности соединены, соответственно, с четвертым и пятым входами преобразователя напряжение-тчэк, а ключевые входы - с выходами третьего и четвертого нелинейного усилителя с зоной нечувствительности, выходы которых соединены с выходом датчика обратной связи, вход второго нелинейного усилителя зоной нечувствительности соединен со входом инвертора, первый выход источника опорного напр51жения соединен со вторыми входами первого и третьего нелинейного усилителя с зоной нечувствительности, а второй выход - со вторыми входами второго и четвертого нелинейного уснлит|еля с зоной нечувствительности. Источники информации, хфшигтые во внимание при экспертизе 34 1.Авторское свидетедьство СССР № 292139, кл. G05 В 11/01, 1971. 2.Гамынин Н. С. Основы следящего гидравлического привода. М., Оборонгиз, 1962, с. 122, рис. 5,1 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая следящая система | 1984 |
|
SU1244633A2 |
| Электрогидравлическая следящая система | 1986 |
|
SU1405024A1 |
| Электрогидравлическая следящая система | 1983 |
|
SU1149212A1 |
| Электрогидравлическая следящая система | 1988 |
|
SU1509827A1 |
| Электрогидравлическая следящая система | 1986 |
|
SU1363133A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРЛВЯИЧЕСКЛЯ СЛЕДЯЩАЯ СИСТЕМА | 1976 |
|
SU826100A1 |
| Регулятор | 1981 |
|
SU964576A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
