10
1363133
Изобретение относится к горнодобывающей технике и может найти широкое применение в следящих системах, например мощных карьерных экскаваторов и врубовых машин.
Целью изобретения является повышение помехозащиш;енности и быстродействия системы.
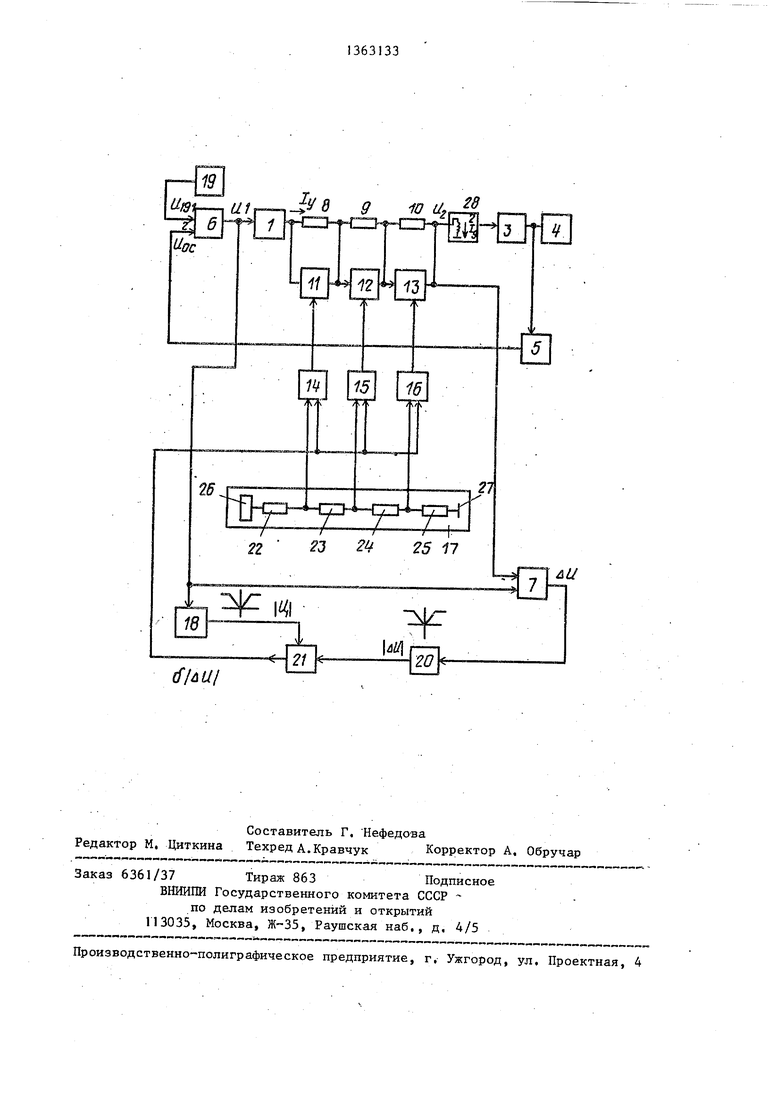
На чертеже представлена блок- схема системы.
Устройство содержит преобразова- тель 1 напряжение - ток, электромеханический преобразователь 2, гидродвигатель с гидроусилителем 3, нагрузка 4, датчик 5 обратной связи, измеритель 6 рассогласов ания, сумматор 7, первый, второй и третий резисторы 8 - 10, первый, второй и третий ключи П.- 13, первый, второй и третий компараторы 14 - 16, источник 17 постоянного напряжения, первый детектор 18, задатчик 19, второй детектор 20, блок 21 деления, резисторы 22 - 25 источника 17 постоянного Напряжения, источник 26 напряжения питания, общую шину 27 системы, обмотку 28 управления.
На чертеже UV - выходное напряже15
и
20
25
ние сумматора 7; IU ( - выходное
напряжение первого детектора 18; 1ди - выходное напряжение второго детектора 20; cCjdUf - выходное напряжение блока деления 21; U - выходное напряжение измерителя рассогласования 6; - выходное напряжение задатчика 19; U д. - выходное напряжение датчика 5 обратной связи; 1у - выходной ток преобразо- ват ел я 1 -напряжение - ток; U,I н пряжение и ток обмотки 28 управлени
Система работает следующим образом, При подаче сигнала U с задатчика 19 на выходе измерителя 6 рассогласования появляется напряжение U, которое поступает на вход преобразователя 1 напряжение - ток и преобразуется в нем в выходной ток управления Ij, который сохраняется неизменным при Ug const и при из менен,ии сопротивления обмотки 28 управления электромеханического преобразователя 2 при ее разогреве. Под воздействием тока управления 1 гидродвигатель 3 перемещает нагрузку 4, и с выхода датчика 5 поступает напряжение обратной связи , которое компенсирует задающее на
пряжение Ц . В процессе работы сис
темь происходит разогрев рабочей жидкости в.гидродвигателе 3 и, следовательно, изменение сопротивления цепи обмотки 28 управления электромеханического преобразователя 2, которое, как правило выполняется медным проводом. Сумма сопротивлений резисторов 8-10 совместно с сопротивлением , о обмотки 28 управления в начале работы системы составляет величину, близкую к сопротивлении) R .лт обмотки 28 управления в нагретом состоянии. Этим обеспечивается минимальная постоянная времени обмотки 28 управления. Одновременно сигнал U. с выхода измерителя 6 рассогласования поступает на первый вход сумматора 7, коэффициент передачи которого выбран равным отношению U к сигналу и , На второй вход сумматора 7 поступает напряжение U, величина которого изменяется пропорционально изменению сопротивления обмотки управления 28 при ее разогреве. Следовательно, на выходе сумматора 7 выделяется напряжение AU, пропорциональное изменению температуры рабочей жидкости в гидродвигателе 3 и, следовательно, изменению сопротивления обмотки 28 управления. Однако напряжение ЛИ зависит еще и от величины входного сигнала и и , так как ток управления 1 пропорционален входному сигналу преобразователя 1 напряжение - ток. Для обеспечения независимости напряжения ли от величины тока управления I .; напряжение JU детектируется вторым детектором 20 и поступает на вход Делимое блока 21 деления. На вход Делитель блока 21 деления поступает с выхода первого детектора 18 напряжение IU I , На выходе блока 21 деления появляется напряжение
Uul.
величина которого не зависит от уровня входных сигналов U U и которое пропорционально изменению сопротивления обмотки управления 28, Напряжение flu и i с выхода блока 2 1 деления поступает на информационные входы компараторов 14 - 16, на опорные
входы которых поступают напряжения 1 1т2 ,,3 П % П
и.1. .Uj. и, с резисторов 22 - 25 ис313631
точника 17 постоянного напряжения, подключенного к источнику 26 питания и общей шине 27, Напряжения U U,
и
пропорциональны величинам сопро
2R ,vrTp. лт 4R -апр. ат 4 4
npHc/l/jUl .иД, УЧли1 7 U;,, cTMUl и, последовательно срабатывает первый 14, второй 15, третий 16 компараторы и своими выходными напряжениями включают ключи 11 - 13. Срабатывая, клю- чи 11 - 13 шунтируют резисторы 8 - 10 таким образом, чтобы в процессе разогрева обмотки 28 управления электромеханического преобразователя 2 сопротивление нагрузки преобразовате ля 1 напряжение - ток оставалось практически неизмененным и равным сопротивлению обмотки 28 управления в нагретом состоянии. Следовательно, существенно возрастает помехозащи- щенность системы, так как информация об изменении сопротивления цепи обмотки управления содержится в самом рабочем сигнале управления, осцилли- РУЮ1ДИЙ сигнал в системе отсутствует и нет необходимости в частотном разделении рабочего и информационного (осциллирующего) сигналов. При изменении полярности сигнала задатчика система работает аналогично.
Техническое преимущество предлагаемой электрогидравлической следящей системы по сравнению с прототипо заключается в следующем: существен
НО повьппается помехозащищенность
системы из-за отсутствия необходимости частотного разделения рабочего и информационного (осциллирующего) сигналов. Это приводит к повышению надежных и точных систем, отсутствию ложных срабатываний.
g 5 о
5
П
334
Формула изобретения Электрогидравлическая следящая
система, содержащая первый детектор, задатчик, соединенный выходом с первым входом измерителя рассогласования, подключенного вторым входом к выходу датчика обратной связи, а выходом через преобразователь напряжение - ток соединенного с первым выводом первого резистора и с информационным входом первого ключа, подключенного выходом к второму выводу первого резистора, к первому выводу второго резистора и к информационному входу второго ключа, соединенного выходом с вторым выводом второго резистора, с первым выводом третьего резистора и информационным входом третьего ключа, подключенного выходом к второму выводу третьего резистора и к входу Электрогидравлического преобразо вателя, соединенного ВЫХОДОМ ерез гидродвигатель с гидроусилителем, подключенным выходом к нагрузке и к входу датчика обратной связи, источник постоянного напряжения, соединенный выходами с опорными входами соответственно первого, второго и третьего компараторов, соединенных информационными входами между собой, а выходами - с управляющими входами ключей, отличающаяся тем, что, с целью повышения помехозащищенности и быстродействия системы, в ней установлены второй детектор, блок деления и сумматор , подключенный первым входом к . выходу измерителя рассогласования и к входу первого детектора, вторым входом - к выходу третьего ключа, а выходом через второй детектор - к входу- Делимое блока деления, соединенного - входом Делитель с выходом первого детектора, а выходом - с информационным входом первого компаратора.
ai
y Q 9 10 (1,Uoc
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая следящая система | 1984 |
|
SU1244633A2 |
| Электрогидравлическая следящая система | 1986 |
|
SU1405024A1 |
| Электрогидравлическая следящая система | 1983 |
|
SU1149212A1 |
| Двухканальная следящая система | 1983 |
|
SU1200236A1 |
| ИМИТАТОР ВИДИМОСТИ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 1991 |
|
RU2056646C1 |
| Электрогидравлическая следящаяСиСТЕМА | 1979 |
|
SU849134A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Следящая система с ограниченным углом поворота выходного вала | 1989 |
|
SU1783469A1 |
| Система управления | 1986 |
|
SU1334104A1 |
| Устройство для контроля электрических параметров полупроводниковых диодов | 1983 |
|
SU1138768A1 |
Изобретение относится к горнб- добывающей технике и может найти широкое применение в следящих системах, например мощных карьерных элеваторов к -врубовых машин. Целью изобретения является повыщенне помехозащищенности и быстродействия системы. Поставленная цель достигается за счет того, что входной сигнал электрогидропреобразователя сравнивают с выходным сигналом измерителя рассогласования, детектируют, делят на модуль сигнала рассогласования и, в зависимости от результата деления, изменяют коэффициент передачи тракта между выхрдом измерителя рассогласования и входом электрогидропреобразователя. 1 ил. со 05 со со 00
22
23 214 25 17
™
U
1
INJ
Щ
(
Составитель Г, Нефедова Редактор М, Циткина Техред А.Кравчук Корректор А, Обручар
Заказ 6361/37 Тираж 863Подписное
ВНИИПй Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, , Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| СЛЕДЯЩАЯ СИСТЕМА | 0 |
|
SU292139A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Электрогидравлическая следящаяСиСТЕМА | 1979 |
|
SU849134A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Электрогидравлическая следящая система | 1983 |
|
SU1149212A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
