СП
N5 4
114
Изобретение относится к горной технике и авиационной технике и может найти применение в приводах мощных карьерных экскаваторов и врубовых машин и в автопилотах самоле- тов.
Целью изобретения является повышение точности системы. ; На чертеже приведена функциональ- ;ная схема системы,
I На схеме приняты следующие обозна- |чения: преобразователь 1 напряжение - |ток, электромеханический преобразо
I ватель 2, гидродвигатель с гидроусилиМЗ да на их выходах сигналы U, U, , UH Iтелем 3, нагрузка 4, датчик 5 обрат- отсутствуют. Следовательно, коэффици- ной связи, фильтр 6 выделения высоких частот, амплитудный детектор 7 с усреднением, суммирующий усилитель 8, первый, второй и третий компараторы 20 9-11, генератор 12 осциллирующего напряжения, задатчик 13, источник
14постоянного напряжения, источник
15питания,резисторы 16 - 19, обмотка 20 управления, общая шина 21 сие- 25 U, , U ь Uj , последо- темы, U;-сигнал на выходе блока, вательно срабатывают первый 9, второй 10, третий 11 компараторы и своими выходными напряжениями Uq, U ,
ент передачи суммирующего усилителя 8 остается неизменным и равным своему номинальному значению. При разогреве рабочей жидкости появляется напряжение UT, свидетельствующее об изменении характеристик следящей системы, которое поступает на сигнальные
входы компараторов 9
При
.- J - - . ,
и;-сигнал на j-м выходе 1-го блока.
1а - ТОК управления, loji. осциллирующий ток.
Система работает следующим образом.
В исходном положении на вход пре- I образователя напряжение - ток 1 с Ге- I нератора 12 ocциллиpyюp eгo напряже- 1ния поступает синусоидальный сигнал , частота которого значительно превышает частоту рабочего сигнала и,, задатчика 13, а амплитуда тока I осциллирующего сигнала 1о(-ц в обмотке 20 управления электромеханического преобразователя 2 обычно составляет часть максимального тока управления
U|, изменяют коэффициент передачи 30 суммирующего усилителя 8 таким образом, что сохраняется скоростная характеристика гидродвигателя 3 неизменной, так как при наличии входного сигнала U, выходной сигнал Ug 35 суммирующего усилителя 8 изменяется, а, следовательно, изменяется ток уп- р.авления Тц, поступающий с выхода преобразователя напряжение - ток 1 на вход электромеханического преоб- 40 разователя 2 гидродвигателя 3, поддерживая скоростную характеристику гидродвигателя 3 неизменной. Таким образом, неизменным сохраняется коэффициент добротности следящей сис - .мак.с
Т.е.
-осц
:& 0,Ы
М01Х.С
В
процессе работы системы происходит
ла выделяется с помошью фильтра 6 выделения высоких частот и амплитудного детектора 7 с усреднением, так что
на его выходе образуется медленно меняющееся напряжение U, пропорциональное зависимости скоростной характеристики гидродвигателя 3 от температуры рабочей жидкости. Опорные напряжения и, , f , и, поступают с выходов источника 14 напряжения на опорные входы компараторов 9 - 11 и
при отсутствии сигнала U удерживают компаратора 9 - 11 в положении, когда на их выходах сигналы U, U, , UH отсутствуют. Следовательно, коэффици-
ент передачи суммирующего усилителя 8 остается неизменным и равным своему номинальному значению. При разогреве рабочей жидкости появляется напряжение UT, свидетельствующее об изменении характеристик следящей системы, которое поступает на сигнальные
U, , U ь Uj , после вательно срабатывают первый 9, в рой 10, третий 11 компараторы и ими выходными напряжениями Uq, U
входы компараторов 9
При
U|, изменяют коэффициент передачи суммирующего усилителя 8 таким образом, что сохраняется скоростная характеристика гидродвигателя 3 неизменной, так как при наличии входного сигнала U, выходной сигнал Ug суммирующего усилителя 8 изменяется, а, следовательно, изменяется ток уп- р.авления Тц, поступающий с выхода преобразователя напряжение - ток 1 на вход электромеханического преоб- разователя 2 гидродвигателя 3, поддерживая скоростную характеристику гидродвигателя 3 неизменной. Таким образом, неизменным сохраняется коэффициент добротности следящей сис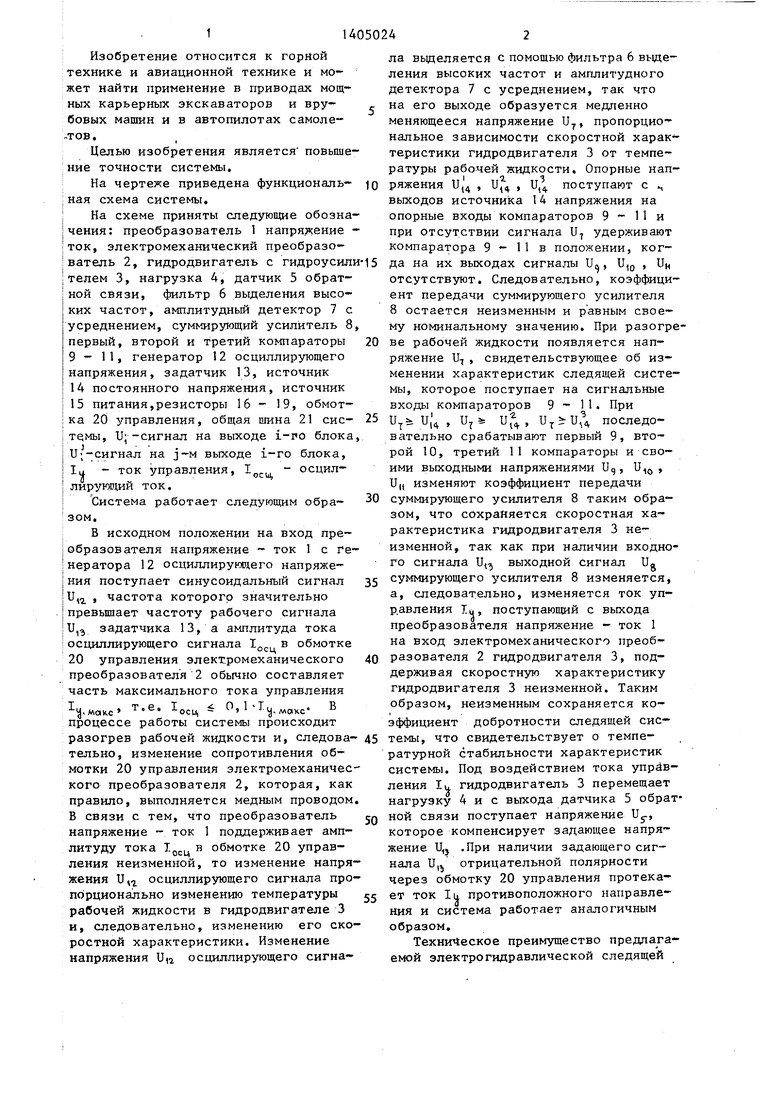
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая следящаяСиСТЕМА | 1979 |
|
SU849134A1 |
| Электрогидравлическая следящая система | 1986 |
|
SU1363133A1 |
| Электрогидравлическая следящая система | 1984 |
|
SU1244633A2 |
| Электрогидравлическая следящая система | 1983 |
|
SU1149212A1 |
| Электрогидравлическая следящая система | 1988 |
|
SU1509827A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ДВУХКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361123C2 |
| ГИДРАВЛИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 1990 |
|
RU2005924C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Электрогидравлическая следящая система | 1987 |
|
SU1476207A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
Изобретение относится к электрогидравлическим следящим системам автоматического управления и может най ти применение, например, в приводах мощных карьерных экскаваторов и врубовых машин. Целью изобретения является повьшение точности системы. Поставленная цель достигается за счет того, что сигнал задания сравнивается с сигн.тлом обратной, связи.Сигнал рассогласования усиливается и суммируется осциллирующим напряжением. Суммарный сигнал через электромехани- чecкиi преобразователь и гидродвигатель с гидроусилителем воздействует на нагрузку. Кроме того, суммарный сигнал детектируется и осредняется. Из него выделяется высокочастотная составляющая, которая сравнивается по уровню с заданными пороговыми значениями, и в зависимости от результатов сравнения меняется коэффициент усиления сигнала рассогласования. 1 ил. i СЛ
разогрев рабочей жидкости и, следова- 45 темы, что свидетельствует о темпетельно, изменение сопротивления обмотки 20 управления электромеханического преобразователя 2, которая, как правило, выполняется медным проводом, В связи с тем, что преобразователь напряжение - ток 1 поддерживает амплитуду тока в обмотке 20 управления неизменной, то изменение напряжения осциллирующего сигнала пропорционально изменению температуры рабочей жидкости в гидродвигателе 3 и, следовательно, изменению его скоростной характеристики. Изменение напряжения и, осциллирующего сигнаратурной стабильности характеристик системы. Под воздействием тока упрйв- ления lu гидродвигатель 3 перемещает нагрузку 4 и с выхода датчика 5 обратной связи поступает напряжение U., которое компенсирует задающее напряжение U,j .При наличии задающего сигнала и,, отрицательной полярности через обмотку 20 управления протекает ток lu противоположного направления и система работает аналогичным образом.
Техническое преимущество предлагаемой электрогидравлической следящей
системы по сравнению с известнор злючается в следующем: существенно повьппена температурная стабильност в связи с введением сигнала на вхо преобразователя напряжение - ток, компенсирующего изменение скоростн характеристики гидродвигателя при разогреве рабочей жидкости. Это поволяет повысить точность устройств и использовать его в высокоточных автоматических системах управления машинами и аппаратами.
Формула изобретения
Электрогидравлическая следящая система, содержащая генератор осциллирующего напряжения, выходом соединенный с первым входом преобразователя напряжение - ток, задатчик, выходом подключенный к первому информационному входу суммирующего усилителя, первым, вторым и третьим управляющими входами соединенный с выходами первого, второго и третьего компараторов, а вторым информационным входом - с выходом датчика обратной связи, входом подключенного к входу нагрузки и к выходу гидродвигателя с гидроусилителем, входом соединенного с выходом электромеханического преобразователя, входом подключенного к входу фильтра выделения высоких частот, выходом соединенного с входом амплитудного де- тектора с усреднением, выходом подключенного к информационным входам первол го, второго и третьего компараторов опориь1ми входами соединенных с пер- вым, вторым и третьим выходами источника постоянного напряжения, отличающаяся тем, что, с целью повышения точности системы, в ней второй вход преобразователя напряжение - ток соединен с выходом суммирующего усилителя, а выход - с входом электромеханического преобразователя.
«7
| Электрогидравлическая следящая система | 1984 |
|
SU1244633A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Электрогидравлическая следящая система | 1986 |
|
SU1363133A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Электрогидравлическая следящая система | 1983 |
|
SU1149212A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
