Изобретение относится к автоматическому управлению и может быть исполь- .зовано в устройствах, координаты позиционирования которых задаются в виде двоичных кодов, например для автоматического выбора носителя информации в диапроекторе.
Целью изобретения является расширение области применения устройства. Это обеспечивается за счет устранения неопределенности между значением действительной координаты и положения перемещаемого объекта при каждом новом включении устройства.
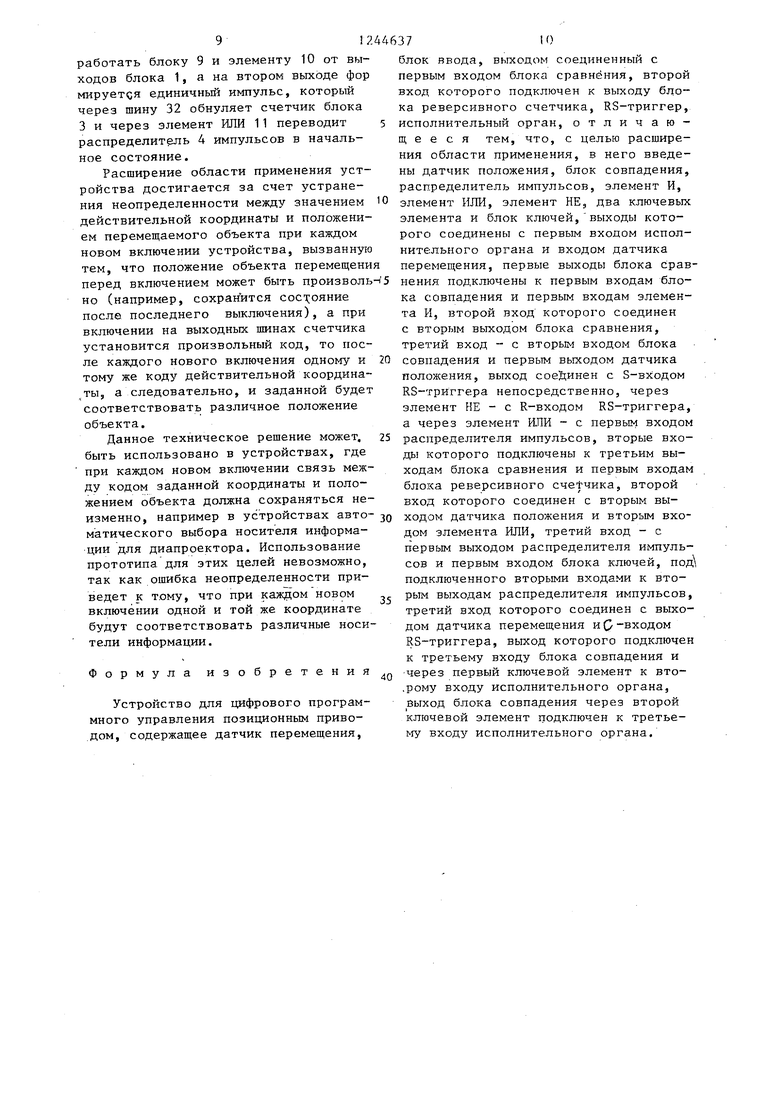
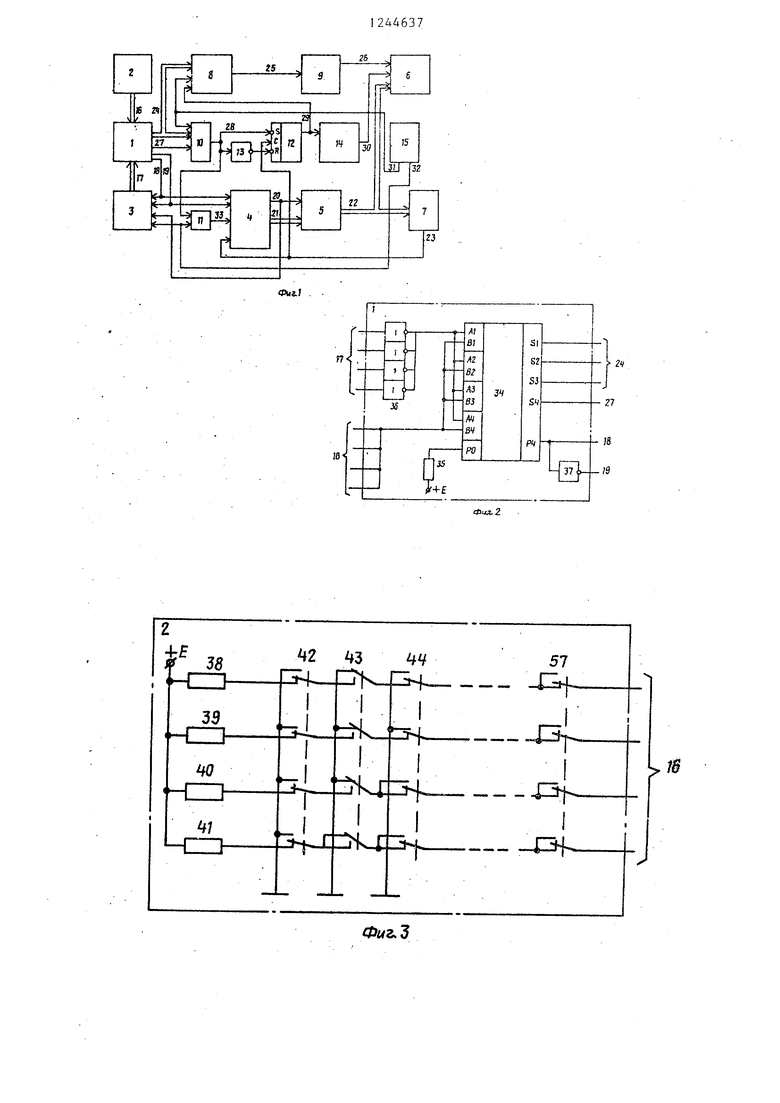
На фиг,1 приведена структурная схема устройства, на фиг.2 - блок сравнения, на фиг.З - блок ввода, на фиг.4 - блок реверсивного счетчика, на фиг.З - блок распределителя импульсов, на фиг.6 - блок ключей, нафиг,7- 70 разности. Блок 1 сравнения содержит датчик перемещения, на фиг,8 - блок двоичный сумматор 34, резистор 35,
элементы НЕ 36, элемент НЕ 37. По шине 16 на входы ®) двоичного сумматора 34 поступает двоичный код заданной }ния, блок 2 ввода, блок 3 реверсивно- 25 координаты, а по шине 17 на входы
совпадения, на фиг.9 - датчик положения .
Устройство содержит, блок 1 сравнего счетчика, блок 4 распределителя импульсов, блок 3 ключей, исполнитель ный орган 6, датчик 7 перемещения, блок 8 совпадения, ключ 9 торможения, элемент И 10, элемент ШШ 11, RS- триггер 12, элемент НЕ 13, ключевой элемент 14, датчик 13 положения. Входы 16 и 17 блока 1 сравнения подключены к выходам блока 2 ввода и блока 3 реверсивного счетчика, а знаковые выходы 18, 19 - к знаковым входам блока 3 реверсивного счетчика и распределителя 4 импульсов, первый выход 20 которого подключен к первому входу блока 3 ключей и к первом входу блока 3 реверсивного счетчика, а вторые выходы 21 - к вторым входам блока .3 ключей, выходы 22 которого подключены к первым входам исполнительного органа 6 и к входу датчика 7 перемещения выход 23 которого подсоединен к первому входу распределителя 4 импульсов, первые входы блока 8 совпадения подключены к выходам 24 старших раз- рядов блока 1 сравнения, а выход 23 - к входу ключа 9 торможения, выход 26 которого подключен к второму входу исполнительного органа 6, первые входы элемента И 10 подключены к выходам 24 старших разрядов блока 1 сравнения второй вход - к выходу 27 младшего разряда, а выход 28 поключен к первому входу элемента ИЛИ 11, к S- входу RS-триггера 12 и через элемент НЕ
35
40
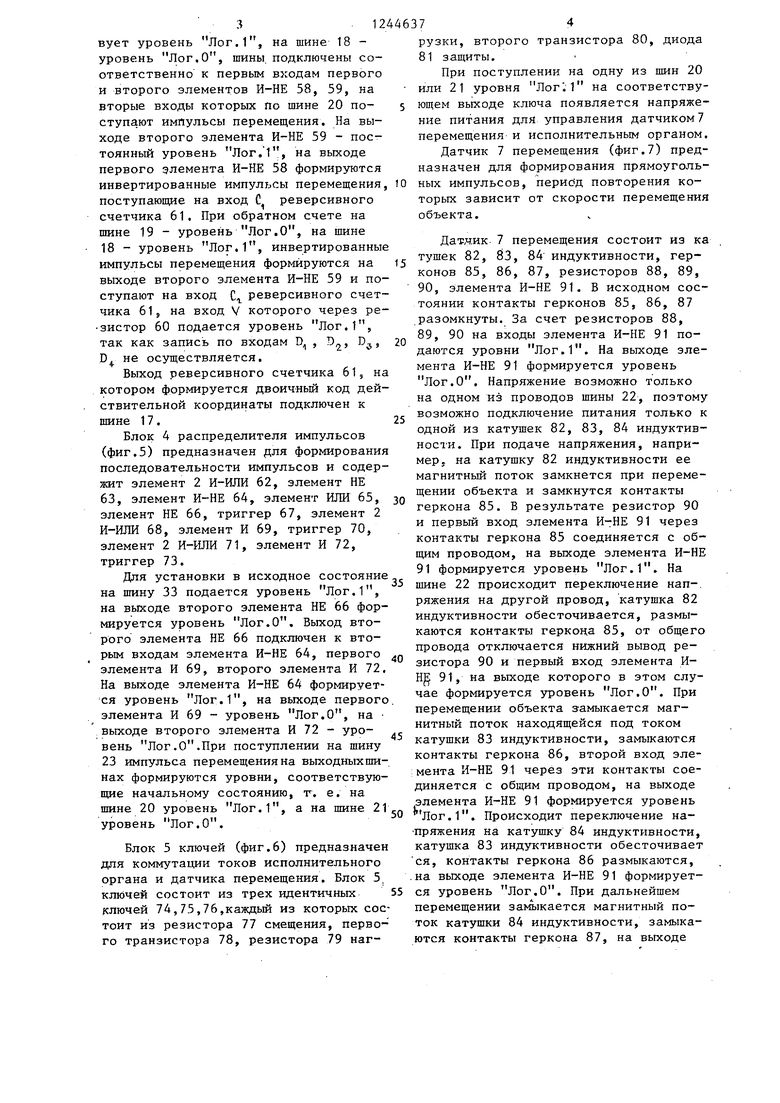
элементов НЕ 36 поступает двоичный код действительной координаты, инвертированный код действительной координаты с выходов элементов НЕ 36 посту30 пает на входы Д двоичного сумматора 34., для выполнения операции суммирования на вход РО двоичного сумматора 134 через резистор 35 подается уровень Лог. 1. Выходы старших разрядов двоичного сумматора 34 подключены к шине 24, выход младшего разряда - к шине 27, знак разности с выхода Р 4 - к шине 18 и на вход элемента НЕ 37, выход которого подключен к шине 19. Блок 2 ввода (фиг.З) служит для выбора нужной координаты и представления ее двоичным кодом. Содержит резисторы 38, 39, 40, 41 смещения и переключатели 42-37,
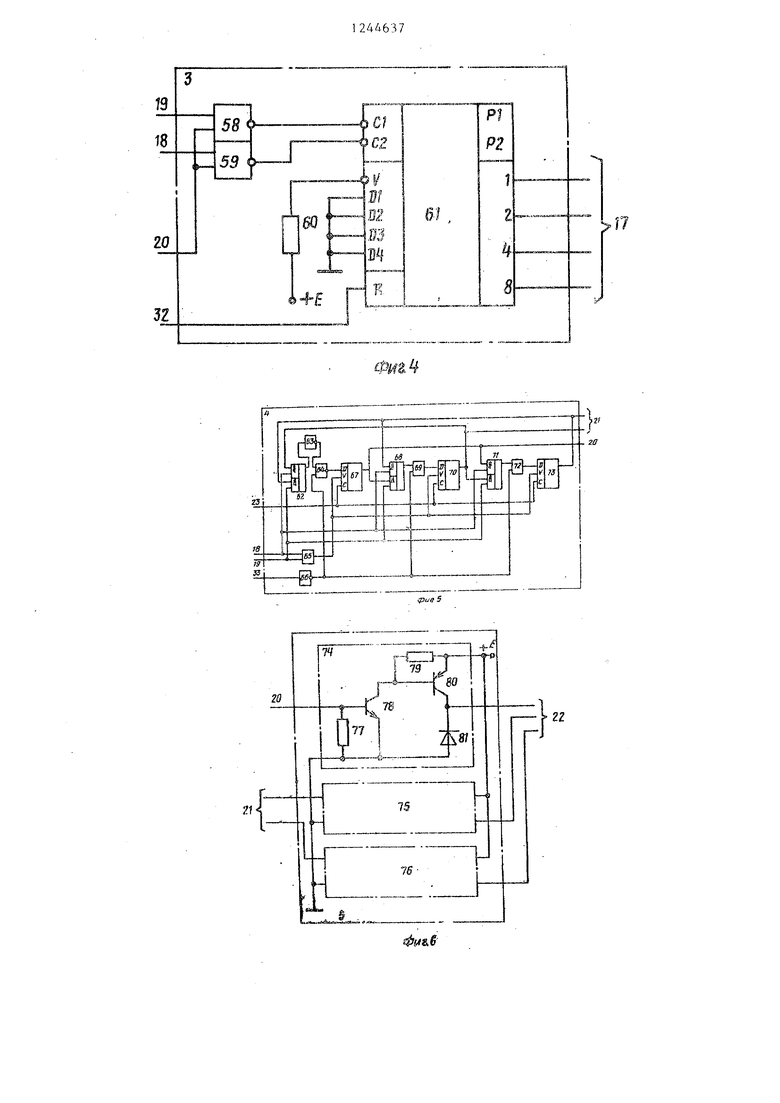
При нажатии одного из переключателей 42-37 на выходе блока формируется соответствующий нажатому переключателю двоичный код. Блок 3 реверсивного счетчика (фиг.4) предназначен для формирования двоичного кода соответствующего действительной координате перемещаемого объекта, Блок 3 реверсивного счетчика содержит первый элемент И-НЕ 38, второй элемент И-НЕ 39, резистор 60, реверсивный счетчик 61,
5 Для установки реверсивного счетчика 61 в начальное состояние, на вход по шине 32 подается уровень Лог.1 При прямом счете на шине 19 присутст45
50
13к R- входу RS-триггера 12, С-вход RS-триггера 12 подключен к выходу 23 датчика 7 перемещения, выход 29 триггера 12 подключен к второму входу
блока 8 совпадения, и к входу ключа
14фиксатора, выход 30 которого соединен с третьим.входом исполнительного органа 6, первый выход 31 датчика
15положения подключен к третьим вхо- дам блока 8 совпадения и элемента И
10, а второй выход 32 - к второму входу блока 3 реверсивного счетчика и к второму входу элемента ИЛИ 11, выход 33 которого соединен с вторым входом распределителя 4 импульсов.
Блок 1 сравнения (фиг,2) предназначен для определения разности между двоичными кодами заданной и действительной координат и определения знака
элементов НЕ 36 поступает двоичный код действительной координаты, инвертированный код действительной координаты с выходов элементов НЕ 36 поступает на входы Д двоичного сумматора 34., для выполнения операции суммирования на вход РО двоичного сумматора 134 через резистор 35 подается уровень Лог. 1. Выходы старших разрядов двоичного сумматора 34 подключены к шине 24, выход младшего разряда - к шине 27, знак разности с выхода Р 4 - к шине 18 и на вход элемента НЕ 37, выход которого подключен к шине 19. Блок 2 ввода (фиг.З) служит для выбора нужной координаты и представления ее двоичным кодом. Содержит резисторы 38, 39, 40, 41 смещения и переключатели 42-37,
При нажатии одного из переключателей 42-37 на выходе блока формируется соответствующий нажатому переключателю двоичный код. Блок 3 реверсивного счетчика (фиг.4) предназначен для формирования двоичного кода соответствующего действительной координате перемещаемого объекта, Блок 3 реверсивного счетчика содержит первый элемент И-НЕ 38, второй элемент И-НЕ 39, резистор 60, реверсивный счетчик 61,
Для установки реверсивного счетчика 61 в начальное состояние, на вход по шине 32 подается уровень Лог.1 При прямом счете на шине 19 присутст
3. 124
вует уровень Лог.1, на шине 18 - уровень Лог,О, шины, подключены соответственно к первым входам первого и второго элементов И-НЕ 58, 59, на вторые входы которых по шине 20 по- ступают импульсы перемещения. На выходе второго элемента И-НЕ 59 - постоянный уровень Лог,1, на выходе первого элемента И-НЕ 58 формируются инвертированные импульсы перемещения,
поступающие на вход С реверсивного счетчика 61, При обратном счете на шине 19 - уровень Лог.О, на шине 18 - уровень Лог,1, инвертированные импульсы перемещения формируются на выходе второго элемента И-НЕ 59 и поступают на вход Сг реверсивного счетчика 61, на вход V которого через ре- зистор 60 подается уровень Лог,1,
2
D
5
20
25
30
так как запись по входам D , D D не осуществляется.
Выход реверсивного счетчика 61, на котором формируется двоичный код действительной координаты подключен к шине 17,
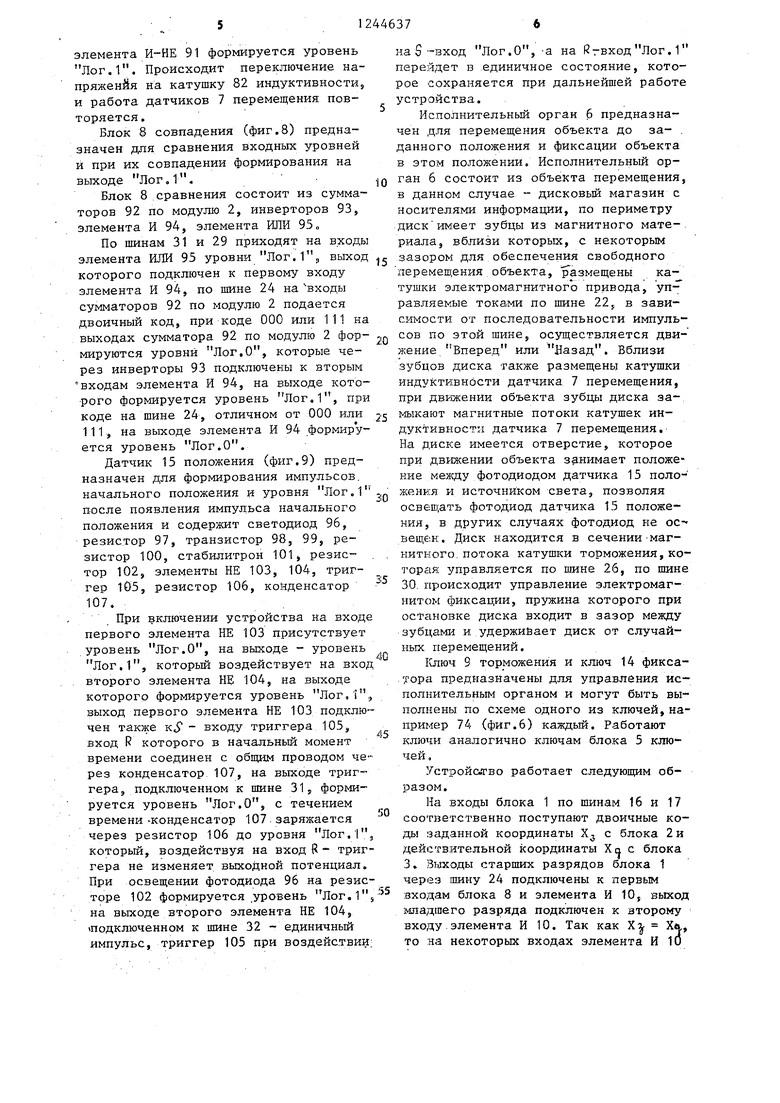
Блок 4 распределителя импульсов (фиг,5) предназначен для формирования последовательности импульсов и содержит элемент 2 И-ИЛИ 62, элемент НЕ 63, элемент И-НЕ 64, элемент ИЛИ 65, элемент НЕ 66, триггер 67, элемент 2 И-ШШ 68, элемент И 69, триггер 70, элемент 2 И-ИЛИ 71, элемент И 72, триггер 73,
Для установки в исходное состояние на шину 33 подается уровень Лог,1, на выходе второго элемента НЕ 66 формируется уровень Лог.О, Выход второго элемента НЕ 66 подключен к вторым входам элемента И-НЕ 64, первого Q элемента И 69, второго элемента И 72. На выходе элемента И-НЕ 64 формируется уровень Лог,1, на выходе первого, элемента И 69 - уровень Лог.О, на выходе второго элемента И 72 - уровень Лог.о.При постзгалении на шину 23 импульса перемещения на выходныхши- нах формируются уровни, соответствзпо- щие начальному состоянию, т. е, на
35
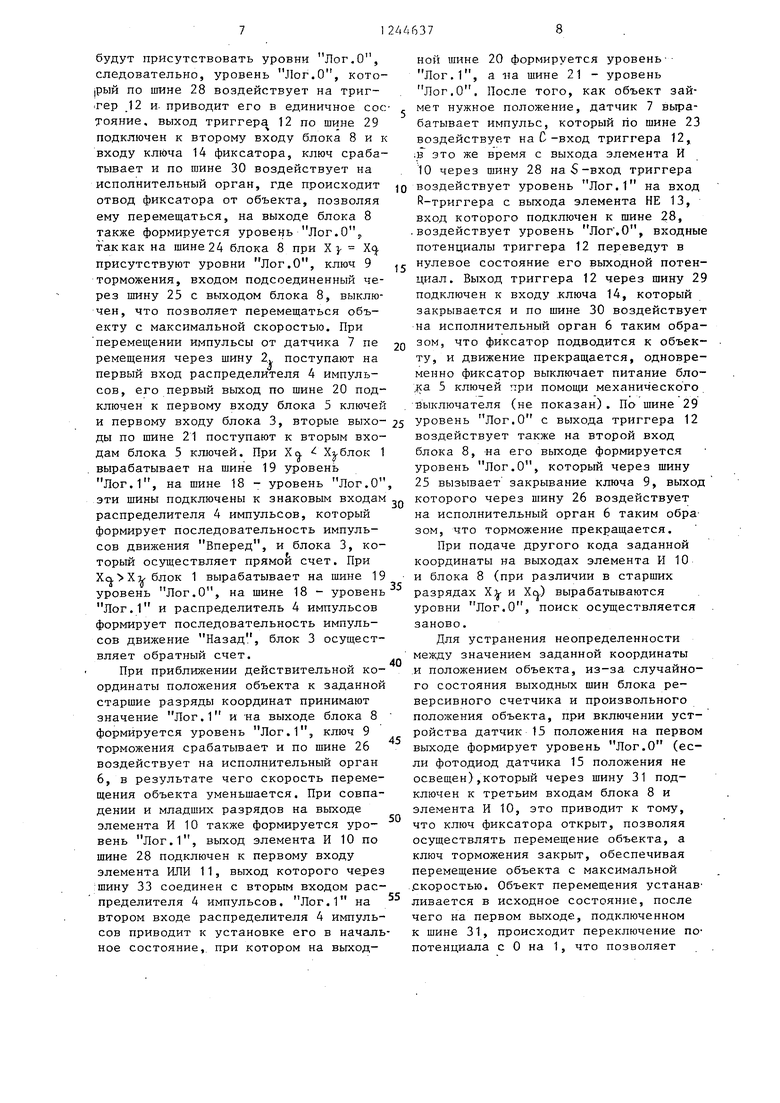
Датчик 7 перемещения состоит из тушек 82, 83, 84 индуктивности, гер конов 85, 86, 87, резисторов 88, 89 90, элемента И-НЕ 91. В исходном со тоянии контакты герконов 85, 86, 87 разомкнуты. За счет резисторов 88, 89, 90 на входы элемента И-НЕ 91 подаются уровни Лог.1. На выходе эле мента И-НЕ 91 формируется уровень Лог,О, Напряжение возможно только на одном из проводов шины 22, поэтом возможно подключение питания только одной из катушек 82, 83, 84 индуктив ности. При подаче напряжения, например, на катушку 82 индуктивности ее магнитный поток замкнется при переме щении объекта и замкнутся контакты геркона 85, Б результате резистор 90 и первый вход элемента И-НЕ 91 через контакты геркона 85 соединяется с об щим проводом, на выходе элемента И-Н 91 формируется уровень Лог.1. На шине 22 происходит переключение напряжения на другой провод, катушка 82 индуктивности обесточивается, размыкаются контакты геркона 85, от общег провода отключается нижний вывод резистора 90 и первый вход элемента И- Hg 91, на выходе которого в этом слу чае формируется уровень Лог.О. При перемещении объекта замыкается магнитный поток находящейся под током катушки 83 индуктивности, замыкаются контакты геркона 86, второй вход эле мента И-НЕ 91 через эти контакты сое диняется с общим проводом, на выходе
шине 20 уровень Лог.1, а на шине 21 .элемента И-НЕ 91 формируется уровень
уровень Лог.О.
Блок 5 ключей (фиг.6) предназначен для коммутации токов исполнительного органа и датчика перемещения. Блок 5, ключей состоит из трех идентичных ключей 74,75,76,каждый из которых состоит из резистора 77 смещения, перво го транзистора 78, резистора 79 нагЛог.1. Происходит переключение на- пряжения на катушку 84 индуктивности катушка 83 индуктивности обесточивае ся, контакты геркона 86 размыкаются, .на выходе элемента И-НЕ 91 формирует- 55 ся уровень Лог.О. При дальнейшем перемещении зам 1кается магнитный поток катушки 84 индуктивности, замыкаются контакты геркона 87, на выходе
рузки, второго транзистора 80, диода 81 защиты.
При поступлении на одну из шин 20 или 21 уровня Лог. 1 на соответствующем выходе ключа появляется напряжение питания для управления датчиком 7 перемещения и исполнительным органом.
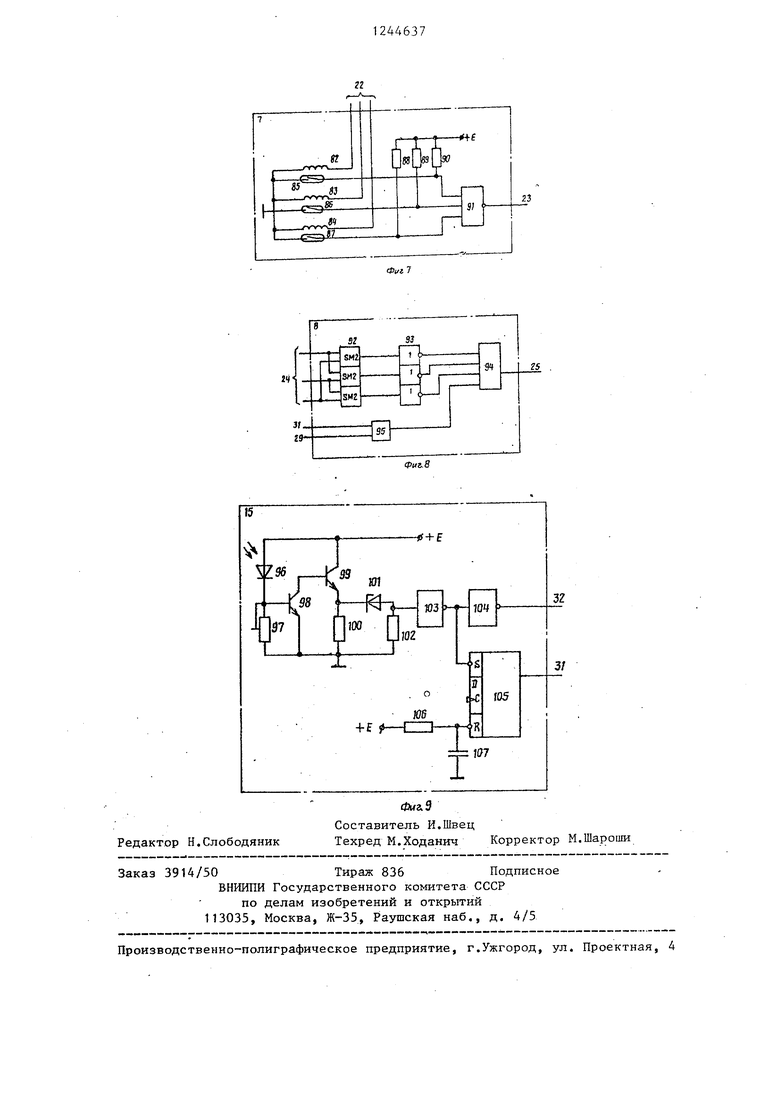
Датчик 7 перемещения (фиг.7) предназначен для формирования прямоугольных импульсов, период повторения которых зависит от скорости перемещения объекта.
20
25
30
Q ,
35
15
Датчик 7 перемещения состоит из ка тушек 82, 83, 84 индуктивности, гер- конов 85, 86, 87, резисторов 88, 89, 90, элемента И-НЕ 91. В исходном состоянии контакты герконов 85, 86, 87 разомкнуты. За счет резисторов 88, 89, 90 на входы элемента И-НЕ 91 подаются уровни Лог.1. На выходе элемента И-НЕ 91 формируется уровень Лог,О, Напряжение возможно только на одном из проводов шины 22, поэтому возможно подключение питания только к одной из катушек 82, 83, 84 индуктивности. При подаче напряжения, например, на катушку 82 индуктивности ее магнитный поток замкнется при перемещении объекта и замкнутся контакты геркона 85, Б результате резистор 90 и первый вход элемента И-НЕ 91 через контакты геркона 85 соединяется с общим проводом, на выходе элемента И-НЕ 91 формируется уровень Лог.1. На шине 22 происходит переключение нап. ряжения на другой провод, катушка 82 индуктивности обесточивается, размыкаются контакты геркона 85, от общего провода отключается нижний вывод резистора 90 и первый вход элемента И- Hg 91, на выходе которого в этом случае формируется уровень Лог.О. При перемещении объекта замыкается магнитный поток находящейся под током катушки 83 индуктивности, замыкаются контакты геркона 86, второй вход элемента И-НЕ 91 через эти контакты соединяется с общим проводом, на выходе
.элемента И-НЕ 91 формируется уровень
Лог.1. Происходит переключение на- пряжения на катушку 84 индуктивности, катушка 83 индуктивности обесточивает ся, контакты геркона 86 размыкаются, на выходе элемента И-НЕ 91 формирует- ся уровень Лог.О. При дальнейшем перемещении зам 1кается магнитный поток катушки 84 индуктивности, замыкаются контакты геркона 87, на выходе
элемента И-НЕ 91 формируется уровень Лог И. Происходит переключение напряжения на катушку 82 индуктивности и работа датчиков 7 перемещения: повторяется.
Блок 8 совпадения (фиг.8) предназначен для сравнения входных уровней и при их совпадении формирования на выходе Лог.1.
Блок 8 сравнения состоит из сумматоров 92 по модулю 2, инверторов 93, элемента И 94, элемента ИЛИ 95„
По шинам 31 и 29 приходят на входы элемента ИЛИ 95 уровни Лог. 1,, выход которого подключен к первому входу элемента И 94, по шине 24 на входы сумматоров 92 по модулю 2 подается двоичный код, при коде 000 или 1 11 на выходах сумматора 92 по модулю 2 формируются уровни Лог.О, которые через инверторы 93 подключены к вторым входам элемента И 94, на выходе которого формируется уровень Лог,1, при коде на шине 24, отличном от 000 или 111, на выходе элемента И 94 формируется уровень Лог.О.
Датчик 15 положения (фиг.9) предназначен для формирования импульсов, начального положения и уровня Лог.1 после появления импульса начального положения и содержит светодиод 96, резистор 97, транзистор 98, 99, резистор 100, стабилитрон 101, резис- тор 102, элементы НЕ 103, 104, триггер 105, резистор 106, конденсатор 107.
При включении устройства на входе первого элемента НЕ 103 присутствует уровень Лог.О, на выходе - уровень Лог.1, который воздействует на вход второго элемента Щ 104, на выходе которого формируется уровень ЛогЛ, выход первого элемента НЕ 103 подключен также к,5 - входу триггера 105, вход R которого в начальный момент времени соединен с общим проводом через конденсатор 107, на выходе триггера, подключенном к шине 31, формируется уровень Лог.О, с течением времени -конденсатор 107 - заряжается через резистор 106 до уровня Лог.1, который, воздействуя на вход R- триггера не изменяет выходной потенциал При освещении фотодиода 96 на резисторе 102 формируется .уровень Лог. на выходе второго элемента НЕ 104, «подключенном к шине 32 - единичный импульс, триггер 105 при воздействии;
0
5
5
0
С
5
0
наS-вход Лог.О, -а на РГВХОД Лог. 1 перейдет в .единичное состояние, которое сохраняется при дальнейшей работе устройства.
Исполнительньш орган 6 предназначен для перемещения объекта до за- . данного положения и фиксации объекта в этом положении. Исполнительный орган 6 состоит из объекта перемещения, в данном случае - дисковый магазин с Носителями информации, по периметру диск имеет зубцы из магнитного мате-, риала, вблизи которых, с некоторым зазором для обеспечения свободного перемеш;ения . объекта, размещены катушки электромагнитного привода, уп- равляемые токами по шине 22, в зависимости от последовательности импульсов по этой шине, осуществляется движение Вперед или Назад. Вблизи зубцов диска также размещены катушки индуктивности датчика 7 перемещения, при движении объекта зубцы диска замыкают магнитные потоки катушек индуктивности датчика 7 перемещения. На диске имеется отверстие, которое при движении объекта занимает положение мелсду фотодиодом датчика 15 положения и источником света, позволяя освеш;ать фотодиод датчика 15 положения, в других случаях фотодиод не ос-- веш,ен. Диск находится в сечении-магнитного, потока катушки торможения, которая управляется по шине 26, по шине 30. происходит управление электромагнитом фиксации, пружина которого при остановке диска входит в зазор между зyбцaмIi и удерживает диск от случайных перемещений.
1Слюч 9 торможения и ключ 14 фикса- .уора предназначены для управления исполнительным органом и могут быть выполнены по схеме одного из ключей, например 74 (фиг.6) каждый. Работают ключи аналогично ключам блока 5 ключей „
Устройолгво работает следующим образом.
На входы блока 1 по шинам 16 и 17 соответственно поступают двоичные коды заданной координаты Х с блока 2 и действительной координаты Ха с блока 3« Выходы старших разрядов блока 1 через 1пину 24 подключены к первым входам блока 8 и элемента И 10, выход младшего разряда подключен к второму входу. элемента И 10. Так как Хг Хл,, то на некоторых входах элемента И 10
будут присутствовать уровни Лог.О, следовательно, уровень Лог.О, кото- |РЫЙ по шине 28 воздействует на триг- .гер 12 и. приводит его в единичное состояние, выход триггера 12 по шине 29 подключен к второму входу блока 8 и к входу ключа 14 фиксатора, ключ срабатывает и по шине 30 воздействует на исполнительный орган, где происходит отвод фиксатора от объекта, позволяя ему перемещаться, на выходе блока 8 также формируется уровень Лог.О так как на шине 2 4 блока 8 при X }- Хс присутствуют уровни Лог.О, ключ 9 торможения, входом подсоединенный через шину 25 с выходом блока 8, выключен, что позволяет перемещаться объекту с максимальной скоростью. При перемещении импульсы от датчика 7 пе ремещения через шину 2. поступают на первый вход распределителя 4 импульсов, его первый выход по шине 20 подключен к первому входу блока 5 ключей и первому входу блока 3, вторые выхо- ды по шине 21 поступают к вторым входам блока 5 ключей. При Хо. - Хг-блок 1
dV
вырабатывает на шине 19 уровень Лог.1, на шине 18 - уровень Лог.О эти шины подключены к знаковым входам распределителя 4 импульсов, который формирует последовательность импульсов движения Вперед, и блока 3, который осуществляет прямой счет. При Ха.Хг- блок 1 вырабатывает на шине 19 уровень Лог.О, на шине 18 - уровень Лог.1 и распределитель 4 импульсов формирует последовательность импульсов движение Назад, блок 3 осуществляет обратный счет.
При приближении действительной координаты положения объекта к заданной старшие разряды координат принимают значение Лог. 1 и -на выходе блока 8 формируется уровень Лог.1, ключ 9 торможения срабатывает и по шине 26 воздействует на исполнительный орган 6, в результате чего скорость перемещения объекта уменьшается. При совпадении и младших разрядов на выходе элемента И 10 также формируется уровень Лог.1, выход элемента И 10 по шине 28 подключен к первому входу элемента ИЛИ 11, выход которого через :шину 33 соединен с вторым входом распределителя 4 импульсов. Лог.1 на втором входе распределителя 4 импульсов приводит к установке его в начальное состояние, при котором на выход-
д5 2о 5
0
5
0
ной шине 20 формируется уровень- Лог,1, а на шине 21 - уровень Лог.О, После того, как объект займет нужное положение, датчик 7 вырабатывает импульс, который по шине 23 воздействует на С-вход триггера 12, это же время с выхода элемента И 10 через шину 28 на S-вход триггера воздействует уровень Лог.1 на вход R-триггера с выхода элемента НЕ 13, вход которого подключен к шине , .воздействует уровень Лог ,О, входные потенциалы триггера 12 переведут в нулевое состояние его выходной потенциал. Выход триггера 12 через шину 29 подключен к входу .ключа 14, который закрывается и по шине 30 воздействует на исполнительный орган 6 таким образом, что фиксатор подводится к объекту, и движение прекращается, одновременно фиксатор выключает питание блока 5 ключей при помощи механического йыключателя (не показан). Па шине 29 уровень Лог.О с выхода триггера 12 воздействует также на второй вход блока 8, «а его выходе формируется уровень Лог.О, который через шину 25 вызывает закрывание ключа 9, выход которого через шину 26 воздействует на исполнительный орган 6 таким образом, что торможение прекращается.
При подаче другого кода заданной координаты на выходах элемента И 10 и блока 8 (при различии в старших разрядах Х; и Х() вырабатываются уровни Лог.О, поиск осуществляется заново.
Для устранения неопределенности между значением заданной координаты и положением объекта, из-за случайного состояния выходных шин блока реверсивного счетчика и произвольного положения объекта, при включении устройства датчик 15 положения на первом выходе формирует уровень Лог.О (если фотодиод датчика 15 положения не освещен),который через шину 31 подключен к третьим входам блока 8 и элемента И 10, это приводит к тому, что ключ фиксатора открыт, позволяя осуществлять перемещение объекта, а ключ торможения закрыт, обеспечивая перемещение объекта с максимальной .скоростью. Объект перемещения устанав ливается в исходное состояние, после чего на первом выходе, подключенном к шине 31, происходит переключение по- потенциала с О на 1, что позволяет
работать блоку 9 и элементу 10 от выходов блока 1, а на втором выходе фор мируется единичньш импульс, который через шину 32 обнуляет счетчик блока 3 и через элемент РШИ 11 переводит распределитель 4 импульсов в начальное состояние.
Расширение области применения устройства достигается за счет устранения неопределенности между значением действительной координаты и положением перемещаемого объекта при каждом новом включении устройства, вызванную тем, что положение объекта перемещени перед включением может быть произволь но (например, сохранится сос : ;ояние после последнего выключения), а при включении на выходных шинах счетчика установится произвольный код, то после каждого нового включения одному и тому же КОДУ действительной координаты, а следовательно, и заданной будет соответствовать различное положение объекта.
Данное техническое решение может, быть использовано в устройствах, где при каждом новом включении связь между кодом заданной координаты и положением объекта должна сохраняться неизменно, например в устройствах авто- матического выбора носителя информации для диапроектора. Использование прототипа для этих целей невозможно, так как ошибка неопределенности приведет к тому, что при каждом новом включении одной и той же координате будут соответствовать различные носители информации.
Формула изобретения
Устройство для цифрового программного управления позиционным приводом, содержащее датчик перемещения.
блок ввода,, выходом соединенный с первым входом блока сравнения, второй вход которого подключен к выходу блока реверсивного счетчика, RS-триггер, исполнительный орган, отличающееся тем, что, с целью расширения области применения, в него введены датчик положения, блок совпадения, распределитель импульсов, элемент И, элемент ИЛИ, элемент НЕ, два ключевых элемента и блок ключей,выходы которого соединены с первьм входом исполнительного органа и входом датчика перемещения, первые выходы блока сравнения подключены к первым входам блока совпадения и первым входам элемента И, второй вход которого соединен с вторым выходом блока сравнения, третий вход - с вторым входом блока совпадения и первым выходом датчика положения, выход соединен с S-входом RS-триггера непосредственно, через элемент НЕ - с R-входом RS-триггера, а через элемент И.11И - с первым входом распределителя импульсов, вторые входы которого подключены к третьим выходам блока сравнения и первым входам блока реверсивного счефчика, второй вход которого соединен с вторым выходом датчика положения и вторым входом элемента ИЛИ, третий вход - с первьм выходом распределителя импульсов и первым входом блока ключей, под подключенного вторыми входами к вторым выходам распределителя импульсов, третий вход которого соединен с выходом датчика перемещения иQ-входом RS-TpHTrepa, выход которого подключен к третьему входу блока совпадения и через первый ключевой элемент к вто- .рому входу исполнительного органа, выход блока совпадения через второй ключевой элемент подключен к третьему входу исполнительного органа.
25
П
27
28
;3
г
аг.
13,
Ж
зг
гз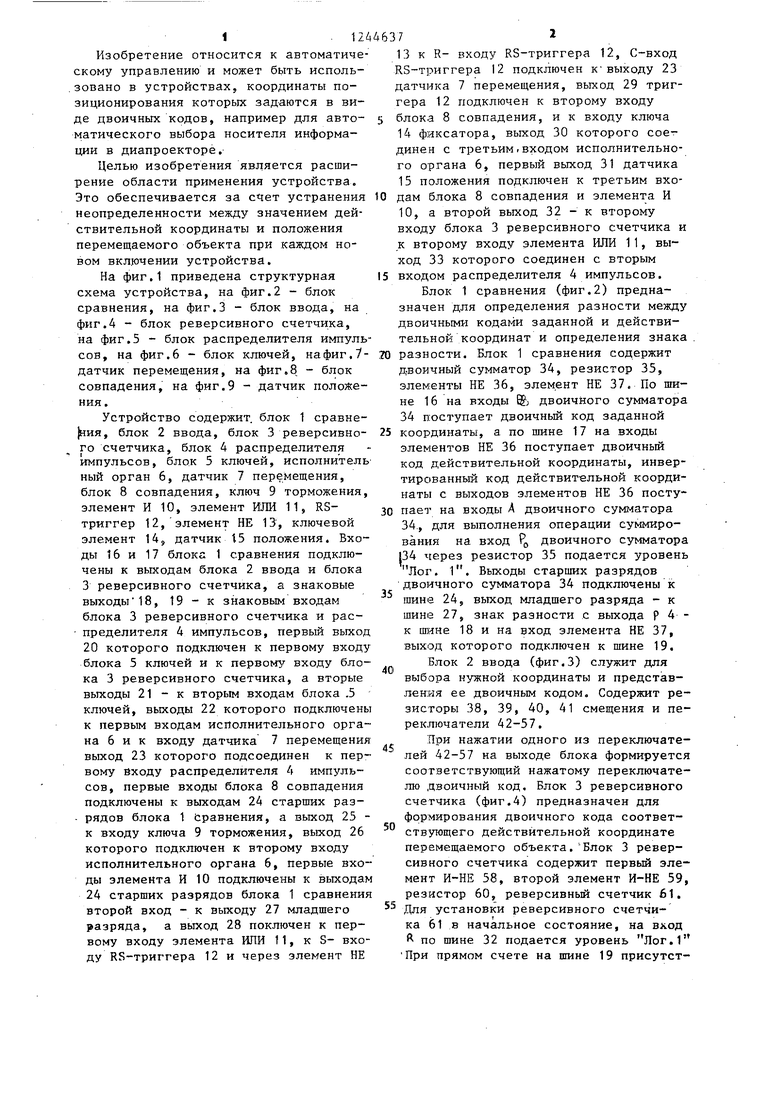
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ввертывания сердечников в катушки | 1987 |
|
SU1642531A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1474704A1 |
| Генератор пилообразного тока электромагнитной развертки | 1986 |
|
SU1398071A1 |
| Электропривод постоянного тока | 1990 |
|
SU1741247A1 |
| Устройство измерения временных интервалов | 1984 |
|
SU1144062A1 |
| Устройство фазоимпульсной модуляции | 1985 |
|
SU1411958A1 |
| Устройство для входного контроля | 1985 |
|
SU1298769A1 |
| Устройство для измерения глубины скважины | 1986 |
|
SU1406354A1 |
| Устройство для входного контроля изделий | 1990 |
|
SU1746388A2 |
| Селектор импульсов по длительности | 1990 |
|
SU1824669A1 |
Изобретение относится к области автоматического управления и может быть использовано в устройствах, координаты позиционирования которых задаются в.виде двоичных кодов, например для автоматического выбора носителя информации в диапроекторе. Целью изобретения является расширение области применения устройства, что обес- печивается за счет устранения неопределенности между значениями действительной координаты и положения перемещаемого объекта при каждом новом включении устройства. Устройство содержит блок ввода, блок совпадения, распределитель импульсов, датчики положения и перемещения, блок сравнения блок реверсивного счетчика, исполнительный орган, ключ торможения, элементы И, ИЛИ, НЕ, RS-триггера, ключевой элемент. Данное техническое решение может быть использовано в устройствах, где при каждом новом включении связь между кодом заданной координаты и положением объекта должна сохраняться неизменно. 9 ил. § W tsa 4 4 Од СО 
Фиг,Ъ
W
20
г-СЦ}
73
l
4so
f
SI
:}
22
15
94
5
+ f
-CZ3--H Г
Редактор Н.Слободяник
ФкаЭ
Составитель И.Швец
Техред М.Ходанич Корректор М.Шароши
Заказ 3914/50Тираж 836 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
