Изобретение относится к подъемным устройствам, а именно к гидравлическим лебедкам.
Цель изобретения - снижение массы лебедки.
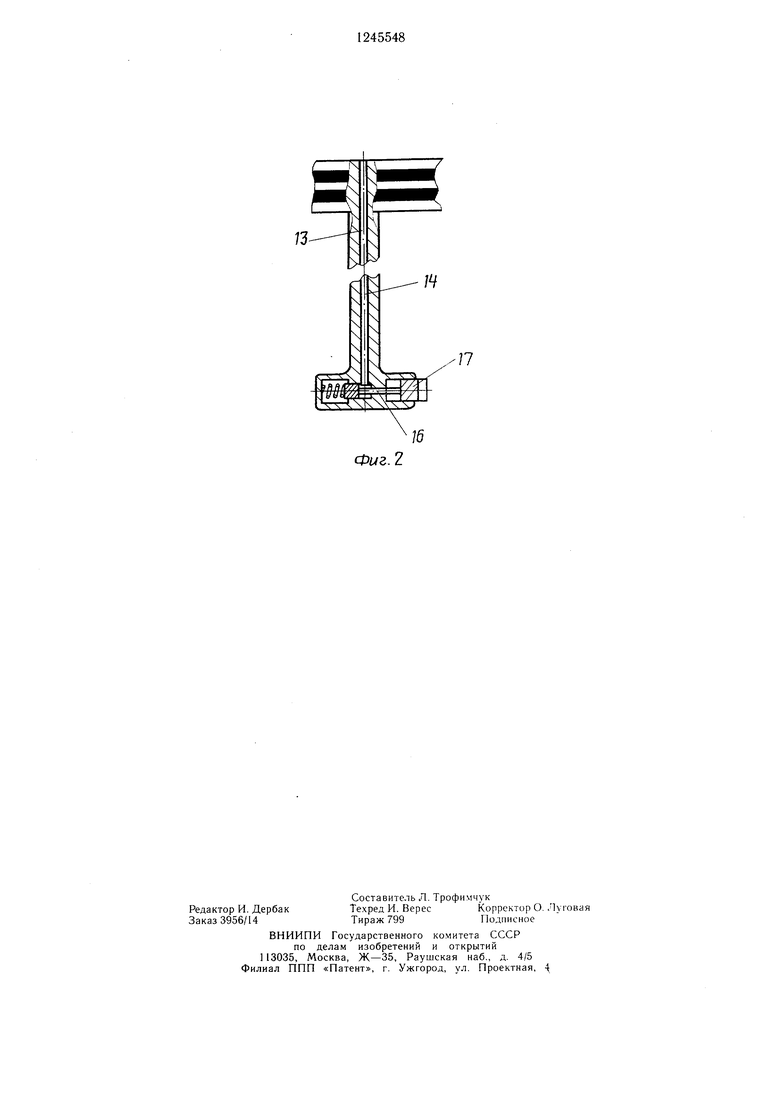
На фиг. 1 изображена такелажная лебедка, общий вид; на фиг. 2 - поперечный цилиндр с захватным элементом.
Такелажная лебедка содержит корпус 1, несущий приводной захватный механизм,
Выдвижение подпружиненной тяги 16 из поперечных цилиндров 15 происходит посредством рабочей жидкости, поступающей по каналам 13 и 14 поршней 6 и штоков 12 гндроцнлиндров 4 и 5.
Управление гидроцилиндрами производится при замыкании поршнями контактов 22 обмоток электромагнитного управления золотникового распределителя 7, золотник которого подключает к рабочим полостям гидвзаимодействующий с упорами 2 рабочего ю роцилиндров соответствующие рабочие трубоканата 3.
Привод захватного механизма выполнен в виде спаренных гидроцилиндров 4 и 5, рабочие полости которых над поршнями 6 через золотниковый распределитель 7 с обмотпроводы слива или напора.
Опускание груза.
Груз подвешен на захвате 17 цилиндра, например 4, в него подается рабочее давление, поршень опускается и подходит
ками 8 электромагнитным управлением свя- 5 к нижней точке, захват удерживается в кон- заны между собой посредством трубопроводов 9 и 10 и полости под поршнями 6 трубопроводом 11.
Поршни 6 со штоками 12 выполнены соответственно с каналами 13 и 14.
Захватный механизм выполнен в виде смонтированных на концах штоков 12 поперечных цилиндров 15, полости которых сообщены с каналами 13 этих штоков и снабжены подпружиненными тягами 16 с захвата20
такте с упором каната под воздействием массы .подвешенного груза.
Одновременно с опусканием поршня цилиндра 4 поршень цилиндра 5 поднимается, его захват 17 выдвигается под воздействием пружины, рабочая жидкость из него сливается. В момент подхода поршня цилиндра к нижней точке упор 2 каната входит в контакт с захватом цилиндра 5 и в дальнейшем удерживает его в выдвинутом
ми 17, выполненными в виде пластин с выре- 25 положении под воздействием массы подвезами.
Внутри корпуса закреплены направляющие 18 для поперечных цилиндров 15 и на одном конце корпуса выполнен кольцевой упор 19 с окном 20 для прохода рабочего
пленного груза.
Поршень цилиндра 4 продо.тжает опускаться под воздействием рабочего давления, его захват отходит от упора каната на незначительное расстояние и под воздейстканата, а на другом конце закреплена ручка 30 вием рабочего давления убирается.
21.
Пад поршнями 6 внутри гидроцилиндров 4 и 5 установлены электроконтакты 22 обмотки В электромагнитного управления золотникового распределителя 7.
Одновременно поршень цилиндра 5 продолжает подниматься и замыкает электроконтакты 22, в цилиндр 5 подается жидкость под рабочим давлением, поршень начинает опускаться, одновременно поршень циЛебедка оборудуется механизмом безо- 35 линдра 4 начинает подниматься, а рапасности (не изображен) известной конструкции, обеспечивающей в случае падения рабочего давления в системе захват рабочего каната.
Принцип действия такелажной лебедки следующий.
Подъем груза.
При включении насоса (не изображен) жидкость по напорному трубопроводу 9 и через золотниковый распределитель 7 поочередно поступает в соответствующие полости 45 гидроцилиндров 4 и 5. При этом штоки 12 подводят под упоры 2 рабочего каната 3 поперечные цилиндры 15 с захватными элементами в виде захватов 17 с вырезами.
Захваты 17 посредством вырезов входят в зацепление с упорами 2 и перемещают рабочий канат с грузом.
При перемещении штоков 12 поперечные цилиндры 15 перемещаются вдоль направляющих 18 корпуса.
бочая жидкость из него поступает на слив, при этом давление падает, но остается достаточным для удержания захвата в убранном положении.
Поршень цилиндра 5 опускается и подходит к средней точке цилиндра, его захват удерживается в выдвинутом положении под воздействием груза, одновременно поршень цилиндра 4 поднимается и подходит к средней точке, остаточное давление в цилиндре 4 снижается и его захват выдвигается под воздействием пружины.
В дальнейшем упор каната входит в контакт с захватом цилиндра 4 и описан- 50 ные операции повторяются.
Лебедка посредством кольцевого упора 19 устанавливается на рабочей площадке и с помощью ручки 21 удерживается в рабочем положении.
Выдвижение подпружиненной тяги 16 из поперечных цилиндров 15 происходит посредством рабочей жидкости, поступающей по каналам 13 и 14 поршней 6 и штоков 12 гндроцнлиндров 4 и 5.
Управление гидроцилиндрами производится при замыкании поршнями контактов 22 обмоток электромагнитного управления золотникового распределителя 7, золотник которого подключает к рабочим полостям гид роцилиндров соответствующие рабочие трубопроводы слива или напора.
Опускание груза.
Груз подвешен на захвате 17 цилиндра, например 4, в него подается рабочее давление, поршень опускается и подходит
к нижней точке, захват удерживается в кон-
5 к нижней точке, захват удерживается в кон-
20
такте с упором каната под воздействием массы .подвешенного груза.
Одновременно с опусканием поршня цилиндра 4 поршень цилиндра 5 поднимается, его захват 17 выдвигается под воздействием пружины, рабочая жидкость из него сливается. В момент подхода поршня цилиндра к нижней точке упор 2 каната входит в контакт с захватом цилиндра 5 и в дальнейшем удерживает его в выдвинутом
25 положении под воздействием массы подвепленного груза.
Поршень цилиндра 4 продо.тжает опускаться под воздействием рабочего давления, его захват отходит от упора каната на незначительное расстояние и под воздействием рабочего давления убирается.
вием рабочего давления убирается.
Одновременно поршень цилиндра 5 продолжает подниматься и замыкает электроконтакты 22, в цилиндр 5 подается жидкость под рабочим давлением, поршень начинает опускаться, одновременно поршень цилиндра 4 начинает подниматься, а ралиндра 4 начинает подниматься, а рабочая жидкость из него поступает на слив, при этом давление падает, но остается достаточным для удержания захвата в убранном положении.
Поршень цилиндра 5 опускается и подходит к средней точке цилиндра, его захват удерживается в выдвинутом положении под воздействием груза, одновременно поршень цилиндра 4 поднимается и подходит к средней точке, остаточное давление в цилиндре 4 снижается и его захват выдвигается под воздействием пружины.
В дальнейшем упор каната входит в контакт с захватом цилиндра 4 и описан- ные операции повторяются.
Лебедка посредством кольцевого упора 19 устанавливается на рабочей площадке и с помощью ручки 21 удерживается в рабочем положении.
Редактор И. Дербак Заказ 3956/14
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб,, д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная,
Фиг. 2
Составитель Л. Трофимчук
Техред И. ВересКорректор О. Луговая
Тираж 799Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод штанговой глубиннонасосной установки | 1983 |
|
SU1103011A2 |
| ПРИЖИМНОЙ РЫЧАГ СКВАЖИННЫХ ГЕОФИЗИЧЕСКИХПРИБОРОВ | 1970 |
|
SU258991A1 |
| ШАГАЮЩАЯ УСТАНОВКА ДЛЯ ВЗЯТИЯ ПРОБ СО ДНА МОРЕЙ И ОКЕАНОВ | 1994 |
|
RU2087718C1 |
| Механизм шагового перемещения по направляющей | 1990 |
|
SU1801853A1 |
| Виброплощадка | 1985 |
|
SU1288389A1 |
| Устройство для внесения жидких веществ в почву | 1978 |
|
SU753381A1 |
| Двигатель внутреннего сгорания с регулируемым объемом цилиндров | 1989 |
|
SU1765479A1 |
| Захватный орган для заготовок | 1986 |
|
SU1355333A1 |
| Микроманипулятор для установки узлов механизма часов | 1982 |
|
SU1083154A1 |
| Гидропривод погружного поршневого насоса | 1987 |
|
SU1555531A1 |

| Патент ФРГ № 1921328, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
