оо
О
оо ел со
Изобретение относится к механизмам шагового перемещения груза по направляющей и может быть использовано при доставке оборудования в условиях горных выработок по неподвижной направляющей или перемещением направляющей с грузом (например, каната) относительно неподвижно закрепленного механизма.
Целью изобретения является повышение надёжности работы механизма.
На фиг. 1 изображен общий вид механизма в продольном разрезе со схемой распределения .сжатого воздуха; на фиг. 2 - сечение А-А на фиг. 1,
Механизм содержит рабочий цилиндр 1 с установленными в нем поршнем 2 и пустотелым штоком 3 с ограничителем хода 4, нажимные цилиндры 5,6 с поршнями 7,8, взаимодействующими с подпружиненными клиновыми зажимами 9,10, расположенными в зажимных головках 11,12.
Зажимная головка 12 жестко связана со штоком 3, проходящим через крышку 13 рабочего цилиндра 1. В клиновых зажимах 9,10 установлены пружинные кольца 14,15, отжимающие их от направляющей 16. В цилиндрических расточках крышки размещены поворотный трехходовой кран 17, золотник 18 нажимного распределителя с толкателями 19,20, с пазами 2-1,22 и кольцевыми проточками 23,24, золотник 25 дополнительного распределителя с толкателями 26,27, золотник 28 рабочего распределителя и регулятор скорости опускания груза 29. Золотник 25 с толкателями 26,27 подпружинен пружиной 30, золотник 18 фиксируется от проворота фиксатором 31. Система распределения рабочей среды включает трубопроводы 32, 33, 34 и каналы 35...50, выполненные в крышке 13, и каналы 51,52, выполненные в золотнике 25. Поворотный трехходовой кран 17 содержит два Г-образ- ных канала 53,54 и один Т-образный канал 55. На рабочем цилиндре 1 закреплены проушины 56.
Механизм шагового перемещения работает следующим образом.
При транспортировании, подъеме и опускании груза механизм шагового перемещения закрепляют в точке доставки груза за проушины 56 посредством сцепного устройства, а груз закрепляют к направляющей 16 (например, к канату).
При положении крана 17, показанном на чертеже, будет осуществляться опускание груза. По каналу 35 сжатый воздух подводится к крану 17, при этом сжатый воздух по Т-образному каналу 55 и каналу 43 подводится к золотникам 25 и 28 , а по каналу 44 - в камеру регулятора скорости 29 и удерживает его в крайнем левом положении. Нажимной цилиндр 6 соединен трубопроводом 32, Г-образным каналом 53, каналом 37, кольцевой проточкой 23 и каналом 41 с этмосферой. Клиновые зажимы 10 под воздействием пружины и опускаемого груза заклинены в зажимной головке 12 и прижаты к направляющей 16. В нажимной цилиндр 5 по трубопроводу 33, Г-образному
0 каналу 54, каналам 42,46,48,43, Т-образному каналу 55 и каналу 35 подается сжатый воздух, под воздействием которого поршень 7 смещен вправо, а клиновые зажимы . 9 отжаты от направляющей 1.6 за счет пру5 жинного кольца 14. Под воздействием груза, закрепленного к направляющей 16, шток 3 с поршнем 2 будет перемещаться влево (опускание груза). Из штоковой полости рабочего цилиндра 1 под воздействием груза
0 будет вытесняться воздух по каналу 36 в атмосферу. Скорость опускания груза будет зависеть от величины перекрытия золотником 28 выхлопного канала посредством регулятора скорости 29. В поршневую полость
5 рабочего цилиндра 1 сжатый воздух подается по трубопроводу 34 каналам 48,43, Т-образному каналу 55 и каналу 35 в ограниченном количестве, так как подводящий канал перекрыт средней шейкой золот0 пика 28. При завершении рабочего хода (при опускании груза) поршень 2 упирается в толкатель 19, который толкает золотник 18 и он начнет перемещаться влево, при этом каналы 41 и 42 соединяются между собой по5 средством паза 21, а каналы 46 и 37 соединяются между собой посредством паза 22. Из нажимного цилиндра 5 сжатый воздух по трубопроводу 33, Г-образному каналу 54 и каналам 42 и 41 пойдет на выхлоп,
0 а нажимной цилиндр 6 соединится с источником сжатого воздуха по трубопроводу 32, Г-образному каналу 53, каналам 37, 46, 48, 43, Т-образному каналу 55 и каналу 35, при этом клиновые зажимы 9, прижмутся к на5 правляющей 16 за счет усилия от сжатой пружины, а за счет сил трения между направляющей 16 и клиновыми зажимами 9 произойдет заклинивание их в зажимной головке 11. Опускание груза прекратится, а
0 клиновые зажимы 10 переместятся вправо от воздействия поршня 8 и отожмутся от направляющей 16 за счет усилия от пружинного кольца 15. В этот момент поршень 2 начнет перемещать и толкатель 26 и золот5 ники 18 и 25 переключатся в крайнее левое положение, при этом по каналам 47,48,43, Т-образному каналу 55 и каналу 35 сжатый воздух подается в правую торцевую полость золотника 28, а левая торцевая полость золотника 28 по каналу 49 соединяется с выхлопом. Золотник 28 переключится в левое крайнее положение. Правые торцевые полости золотников 18 и 25, связанные каналом 50, соединятся с источником сжатого воздуха по каналам 52,48,43, Т-образному каналу 55 и каналу 35, а левые торцевые полости золотников 18 и 25, связанные каналом 45, соединятся с выхлопом по каналу 51. За счет сил, действующих от сжатого воздуха в правых торцевых полостях, золотники 18,25 и 28 будут удерживаться в крайнем левом положении. В штоковую полость рабочего цилиндра 1 по каналу 35, Т-образному каналу 55, каналам 43, 48 и 36 подается сжатый воздух, а поршневая полость по трубопроводу 34 соединяется с выхлопом. Поршень 2 со штоком 3 начнет двигаться вправо (холостой ход при опускании груза). При завершении холостого хода шток 3 упирается в толкатель 20 и золотник 18 начнет перемещаться вправо, при этом каналы 41 и 42 соединяются между собой посредством паза 21, а каналы 46 и 37 соединяются между собой посредством паза 22. Из нажимного цилиндра 6 сжатый воздух по трубопроводу 32, Г-образному каналу 53 и каналам 37 и 46 пойдет на выхлоп, а нажимной цилиндр 5 соединится с источником сжатого воздуха по трубопроводу 33, Г-образному каналу 54, каналам 42, 41, 48, 43, Т-образному каналу 55 и каналу 35, при этом клиновые зажимы 10 за счет силы от пружины прижимаются к направляющей 16, а клиновые зажимы 9 пока не перемещаются, так как сила от поршня 7 меньше, чем силы трения между направляющей 16 и клиновыми зажимами 9 (равная весу груза). Пока шток 3 перемещается до касания с толкателем 27, клиновые зажимы 1.0 заклиниваются в зажимной головке 12 и сила от массы груза, действующая на направляющую 16, передается на зажимную головку 12 и шток 3.
В процессе заклинивания направляющей 16 в зажимной головке 12 происходит переключение золотника 25 и уменьшение силы от массы груза, действующей на направляющую 16 правее зажимной головки 12. После того, как сила от массы груза не будет действовать на направляющую 16 правее зажимной головки 12, поршень .7 сместит клиновые зажимы 9 вправо и направляющая 16 в зажимной головке 11 освободится, а золотник 28 переместится в правое крайнее положение за счет силы, действующей на золотник 28 от сжатого воздуха, подводимого по каналу 49. Штоковая полость рабочего цилиндра 1 по канату 36 соединится с атмосферой, а в поршневую полость по трубопроводу 34 будет подаваться сжатый воздух. Цикл повторится.
При повороте крана 17 против часовой стрелки на угол 90° от положения, показанного на чертеже, будет осуществляться подъем или транспортирование груза.
При рабочем ходе поршня 2 (перемеще- 5 ние поршня 2 вправо) в процессе подъема или транспортирования груза золотники 18,25 и 28 находятся в крайнем левом положении, а регулятор скорости 29 - в крайнем правом положении. При этом полость на0 жимного цилиндра 6 соединена трубопроводом 32 каналом 38, Г-образным каналом 5, каналом 42, кольцевой проточкой 24 и каналом 46 с атмосферой. Клиновые зажимы 10 под воздействием пружины и переме5 щаемого груза заклинены в зажимной головке 12 и прижаты к направляющей 16. В полость нажимного цилиндра 5 по трубопроводу 33, каналу 39, Г-образному каналу 53, каналу 37, правой торцевой полости зо0 лотника 18, каналам 41, 48, 43, Т-образному каналу 55 и каналу 35 подается сжатый воздух, под воздействием которого поршень 7 смещен вправо, а клиновые зажимы 9 отжаты от направляющей 16 за счет пружинного
5 кольца 14. Под воздействием сжатого воздуха, подводимого в штоковую полость рабочего цилиндра 1 по каналам 36,48 и 43, Т-образному каналу 55 и каналу 35, поршень 2 со штоком 3 и зажимной головкой
0 12, в которой зажата направляющая 16, перемещается вправо. Из поршневой полости рабочего цилиндра 1 по трубопроводу 34 осуществляется выхлоп. При завершении рабочего хода вначале начнет
5 переключаться золотник 18, при этом полость нажимного цилиндра 5 по трубопроводу 33, каналу 39, Г-образному каналу 53 и каналу 37, через паз 22 и канал 46 соединится с атмосферой, а полость нажимного
0 цилиндра 6 по трубопроводу 32, каналу 38, Г-образному каналу 54 через паз 21, по каналам 41, 48и 43, Т-образному каналу 54 и каналу 35 соединится с источником сжатого воздуха. Так как сила, действующая
5 на клиновые зажимы 10, больше, чем сила от сжатого воздуха, действующая на поршень 8, то клиновые зажимы 10 не отключатся и груз с направляющей 16 будет продолжать подниматься. За время, пока шток 3 будет
0 перемещаться до касания с толкателем 27, из
полости нажимного цилиндра 5 будет происходить выхлоп и клиновые зажимы 9 будут поджаты к направляющей 16. В это же время произойдет переключение золотника 25 и ле5 вая торцевая полость золотника 28 соединится с источником сжатого воздуха, а правая полость - с атмосферой. Золотник 28 переключится в правое крайнее положение и штоковая полость рабочего цилиндра 1 соединится с
атмосферой, а поршневая - с источником сжатого воздуха. Произойдет холостой ход.
Для возврата направляющей 16 вручную и при вводе ее в механизм кран 17 поворачивают в направлении против часовой стрелки на угол 180° от положения, показанного на чертеже. При этом канал 40 соединяется с Т-образным каналом 55 и Г- образными каналами 53 и 54 и сжатый воздух будет подводиться к нажимным цилиндрам- 5 и б одновременно, клиновые зажимы 9 и 10 отожмутся и направляющая 16 освободится.
При повороте крана 17 по часовой стрелке на угол 90° от положения, показанного на чертеже, работа механизма прекратится, при этом золотник 25 за счет силы от сжатой пружины 30 переключится в правое крайнее положение и левая торцевая полость золотника 28 соединится с каналом 48, по которому при работе механизма подводится сжатый воздух, а правая торцевая полость - с выхлопом.
При запуске механизма, как на подъем, так и на опускание груза, золотник 28 переключится в крайнее правое положение, так как золотник 25 за счет пружины 30 переключен в правое крайнее положение. В поршневую полость рабочего цилиндра 1 будет подаваться сжатый воздух и поршень 2 со штоком 3 будет совершать вначале холостой ход, что обеспечивает возможность запуска механизма на опускание груза, превышающего грузоподъемность механизма.
Предлагаемый механизм шагового перемещения груза по направляющей по сравнению с прототипом повышает надежность работы механизма за счет улучшения переключения золотника рабочего распре
делителя при намерзании льда в полости распределителя и исключения одновременного переключения пневмоуправляемых золотников, а также за счет появившейся возможности опустить груз при перегрузке механизма.
Формула изобретения Механизм шагового перемещения по
направляющей, содержащий рабочий пневмоцилиндр, к торцу которого прикреплен силовой цилиндр привода одного из клиновых зажимов для взаимодействия направляющей, а к концу его штока - ограничитель хода поршня и силовой цилиндр другого клинового зажима и систему управления, состоящую из рабочего золотникового распределителя, попеременно связывающего рабочий пневмоцилиндр с
источником сжатого воздуха и атмосферой нажимного золотникового распределителя, попеременно связывающего через поворотный трехходовой кран силовые цилиндры с источником сжатого воздуха и
атмосферой, и регулятора скорости опускания груза, установленного на торце золотника рабочего распределителя, отличающийся тем, что, с целью повышения надежности в работе, система управления
снабжена дополнительным золотниковым распределителем попеременно связываю щим торцовые полости рабочего распределителя и силовых цилиндров с источником сжатого воздуха и атмосферой, а на торцах
золотников дополнительного и нажимного распределителей выполнены толкатели, попеременно взаимодействующие с поршнем рабочего пневмоцилиндра и с ограничителем его хода.
A-A
| название | год | авторы | номер документа |
|---|---|---|---|
| Газораспределительный механизм и впускной клапан поршневого привода | 2016 |
|
RU2629343C1 |
| Устройство для намотки плоских проволочных тензодатчиков | 1980 |
|
SU900334A1 |
| Автомат для изготовления седлообразных катушек | 1977 |
|
SU736190A1 |
| Автоматическая роторная установка для формования полых полимерных изделий | 1988 |
|
SU1537562A1 |
| Токарный автомат | 1978 |
|
SU768570A1 |
| Дисковый станок для резки круглых заготовок | 1970 |
|
SU410608A1 |
| Устройство для разрушения горных пород | 1969 |
|
SU485220A1 |
| Пневматическое зажимное приспособление к фрезерным станкам для закрепления тонких листов в процессе обработки | 1951 |
|
SU94604A1 |
| СТАНОК ДЛЯ СБОРКИ ТРУБЧАТЫХ СЕКЦИТ! ТЕПЛООБМЕННИКОВ | 1972 |
|
SU327985A1 |
| Лебедка | 1982 |
|
SU1301770A1 |
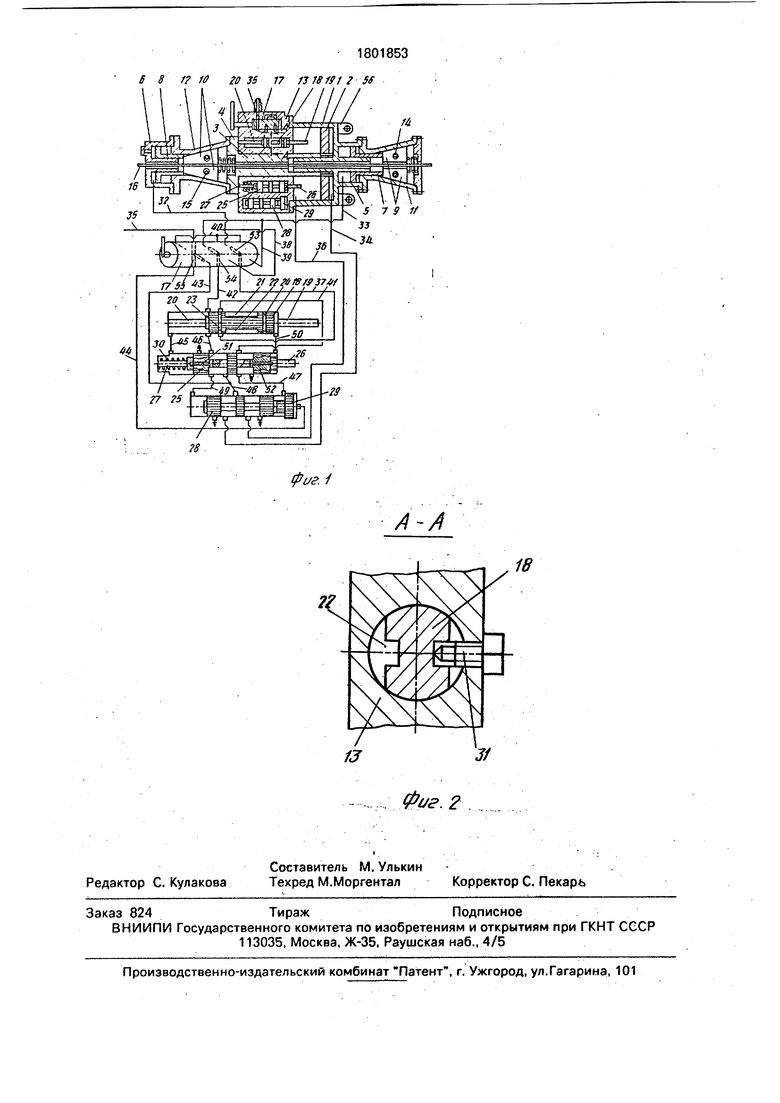
Изобретение предназначено для использования при подъеме, опускании и транспортировке грузов и может быть использовано во всех областях народного хозяйства. Цель изобретения - повышение надежности работы.. Механизм шагового перемещения содержит рабочий пневмоцилиндр 1 с установленным в нем поршнем 2 и пустотелым штоком 3 с ограничителем 4 хода, силовые цилиндры 5 и 6 с поршнями 7 и 8, взаимодействующими с подпружиненными клиновыми зажимами 9 и 10, расположенными в зажимных головках 11 и 12. Зажимная головка 12 жестко связана со штоком 3, проходящим через крышку 13 рабочего цилиндра 1. В клиновых зажимах 9 и 10 установлены пружинные кольца 14 и 15, отжимающие их от направляющей 16. В цилиндрических расточках крышки 13 размещены поворотный трехходовой кран 17, нажимной распределитель с золотником 18 и рабочий распределитель с золотником 28, на торце которого установлен регулятор 29 скорости опускания груза. Новым является наличие дополнительного распределителя с золотником 25, а также то, что на золотниках 18 и 25 нажимного и дополнительного распределителей выполнены толкатели 19,20 и 26,27 которые попеременно взаимодействуют с поршнем 2 и ограничителем 4 его хода. 2 ил. (Л С
| Авторское свидетельство СССР Ne1610992, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
