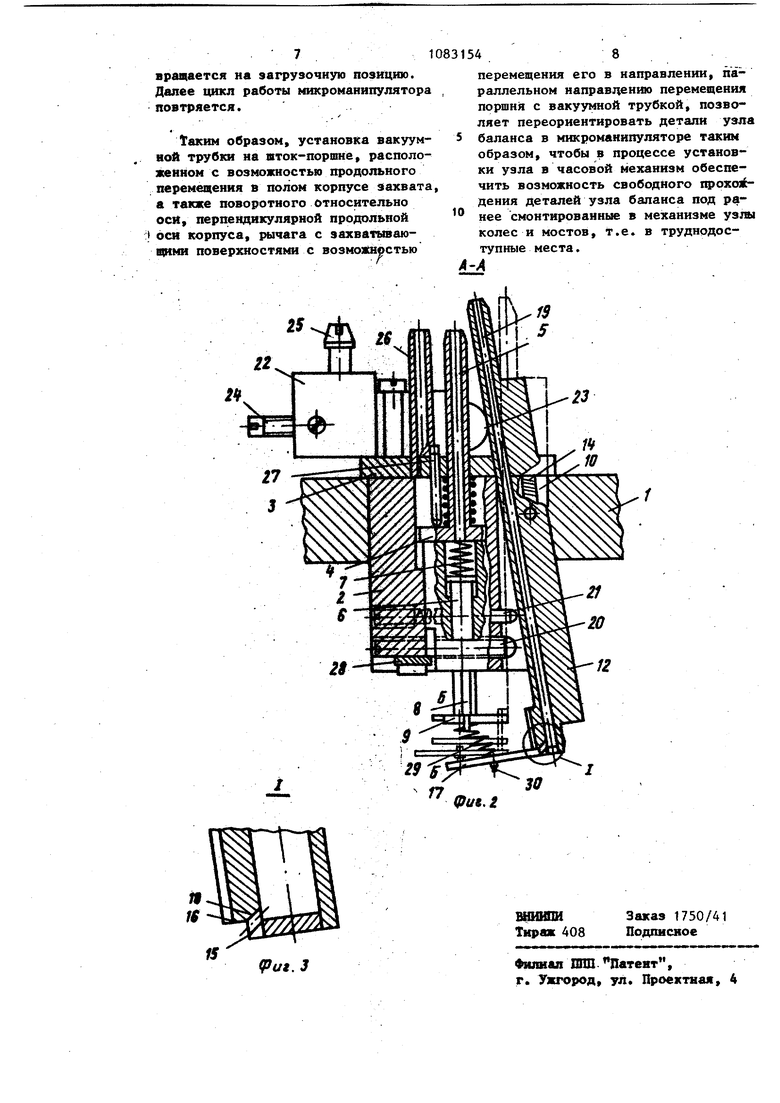
Изобретение относится к средствам автоматизации технологических процессов и может быть использовано например, в промышленных роботах, применяемых в приборостроении, в частностив часовой промьшшенности. Известен вакуумный захват, содер жащий закрепленный в держателе подвижный в осевом направлении, полый цилиндрический корпус с расположенным на его нижнем торце захватным органом, выполненным в виде присоски, служащей для захвата плоской заготовки LI. Недостатком известного вакуумного захйата является то, что он при годен для захвата и установки в при емный лоток транспортного устройства только одной плоской заготовки и не может быть использован для зах вата и переноса узлов деталей, Наиболее близким к предлагаемому по технической сущности является устройство для установки узлов механизма часов, содержащее захватную вакуумную трубку, размещенную в корпусе, в котором шарнирно закреплен с возможностью поворота и .связанный с приводом двуплечий рычаг, в котором выполнены каналы, связан.ные с вакуумной системой 23. Недостатком известного приспособ ления является то, что оно обеспечи вает перемещение захватываемых деталей относительно друг друга только в одной горизонтальной плоскости т.е. в плоскости, параллельной плос кости качания рычага относительно корпуса. Но это приспособление не пригодно в случае необходимости для пространственной переориентации удерживаемых деталей, оно не обеспе чивает -возможности установки удерживаеьб 1х деталей в .-труднодоступные места механизма, что ограйичивает его применение при ав оматизации узловой сборки часовых механизмов. Цель изобретения - повышение про изводительности при ,установке часовых узлов в труднодоступные места часового механизма. Поставленная цель достигается те что микроманипулятор для установки узлов механизма часов, содержащий захватную вакуумную трубку, размещенную в корпусе, в котором шарнирно закреплен с возможностью поворота и связанный с приводом двупле542чий рычаг, в котором выполнены каналы, связанные с вак.уумной системой, снабжен подщ)ужиненным шток-поршнем, установленным в корпусе, выполненным в виде полого цилиндра с крышкой, и ловителем, размещенным на захватывающей вакуумной трубке, при этом захватывающая вакуумная трубка смонтирована на нижнем торце штокпоршня, подпружинена в осевом направлении и связана с вакуумной системой через отверстие, выполненное в шток-поршне, причем привод поворота двуплечего рычага закреплен на крышке корпуса, а шток привода установлен с возможностью взаимодействия с Одним плечом двуплечего рычага, другое плечо которого также установлено с возможностью взаимодействия с размещенным в корпусе подпружиненйым упором. На фиг. 1 изображен микроманипулятор, вид сверху, на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел Iна фиг. 2 (увеличено). Микроманипулятор устанавливается в держатель 1 механической руки, обслуживающей сборочный автомат (не показано), и содержит полый цилиндрический корпус 2 с крышкой 3, внутри которого с возможностью осевого перемещения размещен подпружиненный шток-поршень 4. В шток поршня 4 выполнено центральное сквозное отверстие 5, сообщающееся с одной стороны с системой вакуумирования (не показана), ас другой стороны - с полостью вакуумной трубки 6, установленной на нижнем торце шток-поршня 4 с возможностью совместного с ним и относительно него перемещения. Во внутренней полости шток-поршня 4.над трубкой 6 размещена свободно расположенная пружина 7, амортизирующая давление шток-поршня 4 на трубку 6 в процессе их относительного перемещения. Параллельно трубке 6 на нижнем торце шток-поршня 4 смон- тирован также ловитель 8 для фиксации узла баланса по отверстию в мосту 9 в процессе его захвата. В корпусе 2 с крышкой 3 выполнен продольный паз 10, в котором на оси IIразмещен двуплечий качающийся рычаг 12. Ось 11 расположена в выполненных в корпусе 2 пазах 13 и подпружинена пружиной 14 относительно крышки 3. На торце нижнего плеча рычага 12 имеются базирукидие поверхности 15 и 16, центрирующие в процессе захвата обод 17 баланса соответственно по цилиндрической боковой и верхней торцовой поверхностям. В пересечение указанных .базирующих поверхностей 15 и 16 рычага 12 подведен канал 18, сообщающийся с вакуумируюцей системой через заглушенное снизу отверстие 19, .выполненное в рычаге 12. В корпусе 2 микроманипулятора в плоскости, .перпендикулярной продольной оси корпуса, вмонтированы один за другим регулируеьаШ жес-ткий упор 20 и подпружиненный упор 21, постоян но воздействующий на нижнее плечо .; рычага 12. На крышке 3 корпуса 2 установлен пневмоцилиндр 22, шток 23 которого взаимодействует с верхним плечом рычага 12. В корпусе пневмрцилиндра 22 закреплен регулируемый жесткий упор 24, ограничивающий перемещение штока 23 при его обратном ходе. Пневмоцилиндр 22 связан с пи-. тающей его пневмосистемой через пневмоклапан (не показан) посредством штуцера 25. Для подвода вакуума в надштоковую полость цилиндра 25 в крышке 3 запре сована втулка 26, связанная с вакуумирующей системой микроманипулятора. В крьшпсе 3 закреплен также регулируе мый жесткий упор 27, ограничивающий верхнее положение шток-поршня 4. Нижнее положение шток-поршня 4с захватывающей вакуумной трубкой 6 ограничивается упором 28, заки епленным в корпусе 2. Система вакуумирования захвата включает в себя вакуумный насос с . тремя клапанами (не показаны), управ ляющими в требуемой последовательности созданием вакуума в захваты-: . вгиощем рычаге 12, вакуумной трубке . бив надштоковой полости корпуса 2. Работа вакуумного насоса и пневмоцилиндра 22 осуществляется от общего привода, например, с электрон но-путевым управлением (не показано) .. №1кроманипулятор может быть использован при установке в механизм наручных часов узла баланса, включающего мост 9, спираль 29, обод 17 баланса с осью 30. Шкроманипулятор для установки . узлов механизма часов работает слеДующим образом. На позицию сборки узлы баланса поступают в многоместных кассетах в ориентированном положении, соответствующем установке узла баланса в часовом механизме. В исходном положении микроманипулятора рычаг 12 находится под воздействием подпружиненного упора 21 и занимает наклонное относительно корпуса 2 положение (фиг. 2 пока ано жирными линиями). Цикл работы микроманипулятора начинается с подачи воздуха в пневмоцилиндр 22 перед опусканием механической руки манипулятора на за:гру- зочную позицию, где расположена кассета с узлами баланса. Под действием подаваемого воздуха шток 23 пневмоцилиндра 22 перемещается вправо и, воздействуя на верхнее плечо рычага 12, преодолевая усилие подпружиненного упора 21, поворачивает рычаг 12 на оси 11 по часовой стрелке до касания нижнего плеча рычага 12 жесткого упора 20 (на фиг. 2 показано пунктирными лийиями). , Далее механическая рука (не показана) с находящимся в ее держателе 1 захватом опускается над кассетой, где находятся узлы баланса. При опускании захвата на узел баланса ловитель 8 залавливает мост 9 по базовому отверстию, а нижний торец вакуумной трубки 6 подходит к верхней поверхности моста .9, при этом рычаг 12 своими базовыми поверхностями ,15 и 16 подходит к ободу баланса 17, а нижний торец рычага 12 упирается в кассету. I Благодаря тому, что ось 14 установки рьгаага 12 подпружинена, не происходит жесткого удара рычага 12 о кассету. Перед началом захвата узла баланса.из кассеты между захватывающими поверхностями 15 и 16 рычага 12 и соответствующими, поверхностями обода 17 баланса образуется . зазор, который определяется установкой жесткого упора 20 в корпусе захвата. Нгшичие указанного зазора предотвращает возможность поломки или порчи обода 3 баланса в процессе опускания микроманипулятора. После опускания микроманнпулятора на узел баланса срабатьшают соответствующие клапаны вакуумирующей с системы и в отверстии 5 шток- поршня 4, в отверстии 19 и канале 18 рычага 12 создается вакуум, в результате чего мост 9 узла баланса присасывается к трубке 6, а обод 17 баланса - к захватывающим поверх ностям 15 и 16 рычага 12. В момент соприкосновения моста 9 с нижнем торцом вакуумной трубки 6 перекрывается отверстие последней,, и во .внутренней полости шток-поршня 4 увеличивается разряжение. Под действием указанного разряже ния вакуумная трубка с пружиной 7 поднимается вместе с захваченным мостом 9 до момента касания верхним витком пружины 7 нижнего торца штока. Затем осуществляют подъем механической, руки с микроманипулятором. В результате этого удерживае1« 1й в последнем узел баланса поднимается над кассетой. За счет клапана вакуумной системы, связанного с вту кой 26, в надштоковой полости корпуса 2 создается разряжение и штокпоршень 4 с вакуумной трубкой 6 и мостом 2 поднимаются относительно корпуса 2 захвата до тех пор пока верхний торец шток-поршня 4 не коснется упора 27. В результатеуказан ного перемещения мост 9 поднимается над ободом 17 баланса и спираль 29 растягивается на заданную величину, определяемую из условия свободного прохождения узла баланса под уже смонтированными в механизме часов узлами колес и мостов. После подъема моста 9 над ободом 17 баланса на требуемую величину отключают подачу сжатого воздуха в пневмоцилиндр 22. При зтом прекра щается давление штока 23 на верхнее плечо рычага 12 и под действием подпружиненного упора 21 на нижнее плечо рычага 12 последний начинает поворачиваться на оси 11 против часовой стрелки до тех пор, пока шток 23 пневмоцилиндра 22, перемещаясь под действием верхнего плеча рычага 12 влево, не коснется жесткого упора 24. В процессе поворота рычага 12 против часовой стрелки удерживаемый им обод 17 баланса отклоняется на . некоторый угол от вертикальной оси В-Б, проходящей через ось отверстия в мосту 9 под опору баланса. Величина указанного угла выбирается из ; условия свободного прохождения обода 17 баланса в процессе его установки в механизм часов под уже смонтированные в нем узлы колес и мостов. Необходимое отклонение рычага 12 устанавливается положением регулируемого упора 24 пневмоцилиндра 22. После переориентации узла баланса в микроманипуляторе механическая рука манипулятора перемещается на сборочную позицию, где расположена кассета с механизмами наручных часов, и микроманипулятор с узлом баланса останавливается над зоной расположения узла баланса в часовом механизме . Ловитель 8 микроманипулятора западает в соответствующее отверстие в платине, фиксируя тем самым, положение моста 9 в часовом механизме. Затем за счет отключения вакуума в рычаге 12 обод 17 баланса возвращается в свое первоначальное положение под действием сил упругости спирали 29 и собственного веса. При этом обод 17 баланса как бы подныривает под ранее установленные узлы в часовом механизме. После установки баланса в часо вом механизме отключается вакуум в захватьюающей трубке 6. Вследствие этого мост 9 отрывается от нижнего торца трубки 6 и опускается на базовые штифты платины .(не показаны) . При этом трубка 6 под действием собственного веса совместно с пружиной 7 опускается на мост 9 и предварительно прижимает его к платине. Затем отключается вакуум во втулке 26 и шток-поршень 4 под действием давящей на него сверху пружины опускается вниз до упора 28. Пружина 7 противодействует усилию пруткины, действующей на шток, в результате чего происходит плавное изменение давления на мост со стороны трубки 6, и балансовый мост плотно садится на платину. При зтом усилие пружины 7 исключает возможность порчи или поломки цапфы моста 9 и штифтов платины. После установки узла баланса в механизм часов механическая рука манипулятора поднимает микроманипулятор над часовым механизмом и воз


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ установки узла баланса в часовой механизм с анкерным преобразователем | 1983 |
|
SU1118957A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ЭЛЕКТРОННЫХ КОМПОНЕНТОВ НА ПЕЧАТНОЙ ПЛАТЕ | 1994 |
|
RU2082291C1 |
| Устройство для установки радиоэлементов на печатные платы | 1988 |
|
SU1631766A1 |
| УСТАНОВКА ДЛЯ СБОРКИ ПЕРЕХОДОВ | 1969 |
|
SU250320A1 |
| Устройство для ультразвукового контроля изделий типа колец | 1987 |
|
SU1490628A2 |
| Захват для съема бобин с бобинодержателей текстильных машин | 1980 |
|
SU910520A1 |
| УСТРОЙСТВО Для УСТАНОВКИ УЗЛА ВАЛАНС-СПИРАЛЬ НА БАЛАНСОВЫЙ МОСТ ЧАСОВ | 1973 |
|
SU386377A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Телескопическое захватное устройство | 1986 |
|
SU1390133A1 |
| Установка для сборки пакетов | 1982 |
|
SU1106792A1 |
МИКРОМАНИПУЛЯТОР ДЛЯ УСТАНОВКИ УЗЛОВ МЕХАНИЗМА ЧАСОВ, содержащий захватную вакуумную трубку, размещенную в корпусе, в котором шарнирно закреплен с возможностью поворота и связанный с приводом двуплечий рычаг, в котором вьтолнены каналы, связанные с вакуумной 7 J системой, отличающийся тем, 4TOj с целью повышения прйизводительности при установке часовых узлов в труднодоступные места часового механизма, он снабжен подпружиненным шток-поршнем, устанойтенпым в корпусе, выполненньм в вцде полого цилиндра с крьткой, и ловителем, размещенным на захватывающей вакуумной трубке, при зтом захватывающая трубка смонтирована на няжн&м торце шток-поршня, подпружинена в осевом направлении и связана с вакуумной системой через отверстие, выполненное в шток-поршне, причем г привод поворота двуплечего рычага закреплен на кршвке корпуса, а шток привода установлен с возможностью взаимодействия с одним плечом двуплечего рычага, другое плечо которого также установлено с возможностью взаимодействия с размещенным в ксфпусе подпружиненным упором. сх со сН и
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вакуумный захватный орган | 1977 |
|
SU644579A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
