Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения угловых иеремещений объектов.
Цель изобретения - повышение точности измерений путем уменьшения влияния боковых потоков рассеяния в магнитной цепи, благодаря чему повышаются линейность и симметричность выходной характеристики датчика и уменьшается дестабилизирующее действие электромагнитного момента.
На чертеже представлена принципиальная схема датчика.
Датчик угловых перемещений содержит статор, выполненный в виде Ш-образ- ного магнитонровода 1, у которого средний стержень 2 превышает по ширине и высоте крайние стержни 3 и 4. Ротор 5 датчика установлен с воздушным зазором о симметрично относительно стержней 2-4 магик- топровода статора. Величина Ъ расчитывается заранее, исходя из требуемого уровня выходного сигнала и допустимой потребляемой мопшости, и численно равна среднему значению зазора между средним и крайним стержнями магнитопровода статора и ротором. На стержнях 2-4 магнитопровода I размещены первичная обмотка 6 и две дифференциально включенные вторичные обмотки 7 и 8. Стержень 2 превьппает по 1пи- рпне стержни 3 и 4 приблизительно в 2 раза, а по высоте оп превьинает их на величину 2т 2Ь а/а„, где b -- расчетная величина возду1пного зазора; а и QO -- njnpnna край- пих стержней 3 и 4 средпего стержня 2 магнитопровода 1.
Датчик уг.повых перемещений работает следуюн и.м образом.
Датчик крепится статором па неподвижное основание, а ротором 5 связывается с контроли.руемым объектом (не показан). В исходном положении ротор 5 располагается симметрично относите.льнс стержней 2 -4 магпитоировода 1. При подаче напряжении от источника питания пере.менного тока (не показан) iia первичную обмотку б датчика возникает магнитный поток, наводящий ЭДС во вторичных обмотках 7 и 8. В исходном положении эти ЭДС компенсируются.
5
0
а потому сигнал на выходе дифференциально вк.люченпых вторичных обмоток 7 и 8 оказывается равным нулю. Нри перемеш,е- нпи ротора 5 симметрия нарушается, и па выходе обмоток 7 и 8 появляется сигнал, пропорциональный перемен1ению ротора 5.
Вследствие того, что зазор между ротором 5 и крайпими стержнями 3 и 4 увеличен но сравнению с расчетной зазора в, ве.пичины боковых потоков рассеяния и их в;1ияние на форму выходной характеристики датчика уменьшаются, а ве:п1чина дестабилизирующего электромагнитиого момента также снижается.
В предложенном датчике достигнуто у.лучшение линейности и симметричности выходной характеристики на 30% и умень- П1епие электромагнитного момента на 20%, что нозволяет повысить T04HocTij измерений и(5 cpcBfiCHHio с извест; ым датчиком угловых перемещений, в котором стержни магпитопро- вода выполнепы одинаковыми но высоте при сохрапении того же уровня выходного сигнала ii потребляемой чощпости.
Формула изобретения
Датчик yi-ловых перемеикмшй, содержа- П1.ИЙ статор, вьп1о.лнеппьи1 в виде 111-образ- ного магнилюировода, у которого средний стержень нревышас г по пирине крайние стержни, первичную и вт(зричные об- отки. разменгенные соответственно на среднем и крайних стержнях статора, п установленный с возду1пным зазором симметрично относительно сл сржней статора безобмоточ- ферромагнитный ротор, отличающийся тем, что, с целью повьцпения точности, средний стержень выпо.лнен 11рев| п11ающим крайних сл ержней на величину
2ш . 2Ь ajuo,
де b
расчетная величина иоздуи ного зазора, численно равная среднему значению зазора между средним и крайним стержня- лся магнитопровода статора п ротором; а I- Ос - ширина краЙ1-;их и среднего стержней ма1 нитс;провода сл атора.
ВНИИПИ Заказ 3984/30 Тираж 670 Подписное Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4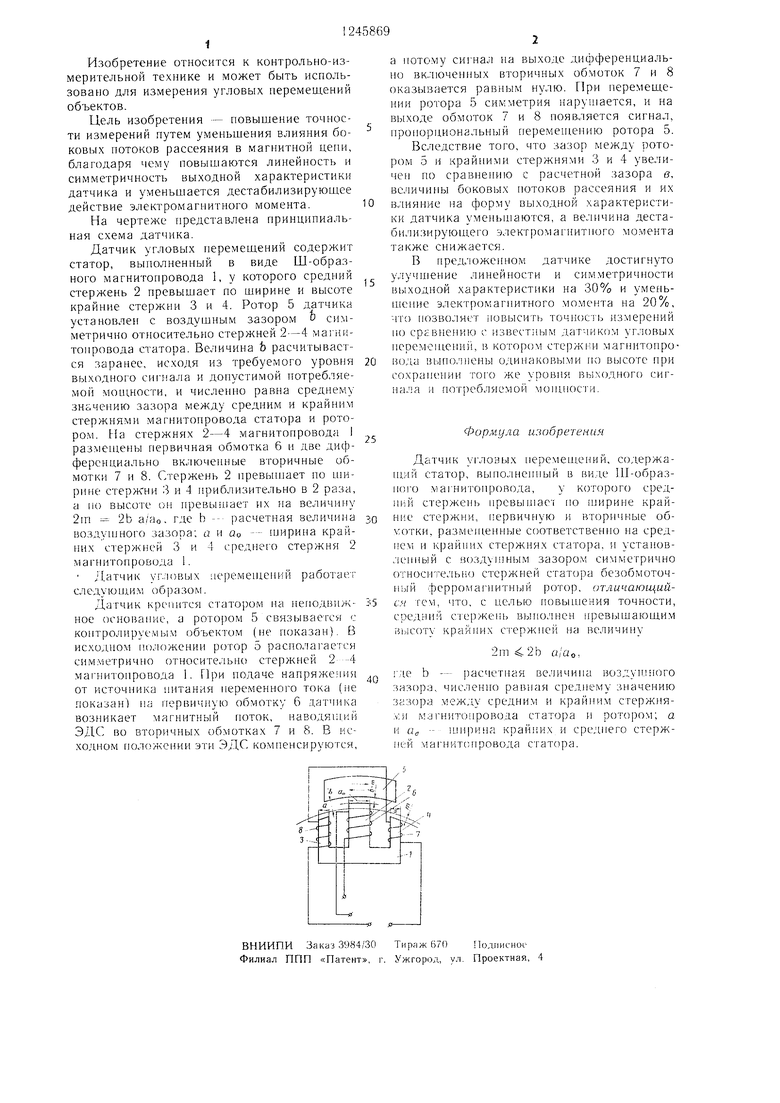
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения реактивного момента трансформаторных датчиков угла | 1979 |
|
SU905668A1 |
| Датчик угловых перемещений | 1984 |
|
SU1234725A1 |
| Устройство для обнаружения короткозамкнутых витков в обмотках электрических машин | 1979 |
|
SU928258A1 |
| Дифференциально-трансформаторный датчик перемещений | 1985 |
|
SU1270549A1 |
| ЭЛЕКТРОМАШИННЫЙ ИМПУЛЬСНЫЙ ФАЗОВРАЩАТЕЛЬ | 2019 |
|
RU2720352C1 |
| Индуктивно-трансформаторный датчик перемещений | 1988 |
|
SU1516747A1 |
| Бесконтактный преобразователь угла поворота | 1989 |
|
SU1690109A1 |
| Бесконтактный преобразователь угла поворота с сосредоточенными обмотками | 1985 |
|
SU1328887A1 |
| Многополюсный преобразователь угла поворота вала в фазу электрического сигнала | 1981 |
|
SU998863A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ БОЛЬШИХ УГЛОВЫХ И МАЛЫХ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2062975C1 |
Изобретение относится к контрольно- измерительной технике и может быть использовано для измерения угловых перемещений объектов с повышенной точностью за счет снижения уровня боковых потоков рассеяния в магнитной цепи датчика, вследствие чего повышается линейность и симметричность его выходной характеристики и уменьшается величина дестабилизирующего электромагнитного момента. Датчик угловых перемешений содержит статор, выполненный в виде Ш-образ- ного магнитопровода, и связываемый в процессе измерений с контролируемым объектом ротор, установленный относительно статора с воздушным зазором симметрично (в исходном положении) относительно стержней магнитопровода. На стержнях магнитопровода размешены первичная возбуждающая обмотка и дифференциально включенные вторичные выходные обмотки. Средний стержень магнитопровода выполнен с превышением по ширине и высоте относительно крайних стержней, что позволяет уменьшить величину боковых потоков рассеяния. Согласно экспериментальным данным выходная характеристика датчика имеет улучшенную на 30% линейность и симметричность, а величина электромагнитного момента в нем снижена на 30%. 1 ил. S (Л ю 4 сл 00 о: со
| Преобразователь перемещений длялОгОМЕТРичЕСКОй СХЕМы изМЕРЕНия | 1977 |
|
SU848982A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ПРЕОБРАЗОВАНИЯ МЕХАНИЧЕСКОГО ПЕРЕМЕЩЕНИЯ В ЭЛЕКТРИЧЕСКОЕ НАПРЯЖЕНИЕ ИЛИ ТОК | 0 |
|
SU170349A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
