Изобретение относится к измери - тельной технике и может быть исполь- зовано в системах автоматического контроля и регулирования.
Целью изобретения является повышение точности путем уменьшения реактивного момента и ухода нулевых значений реактивного момента и выходного напряжения.
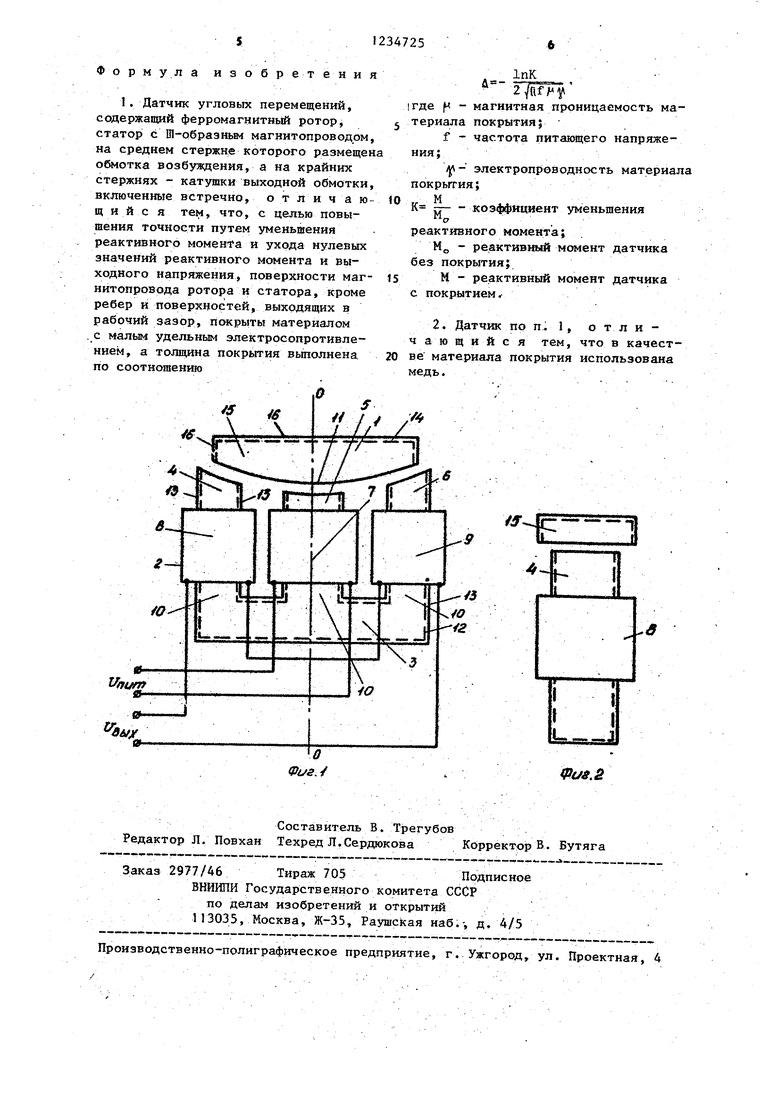
На фиг. 1 представлен датчик, . общий вид; на .фиг. 2 - то же, вид сбоку.
Датчик содержит ротор I, представляющий сш 1етричное относительно нейтральной оси 0-0 ферромагнитное тело и статор 2, рыполненный из Ш-об- раэного магнитопровода 3, на стержнях 4, 5 и 6 которого расположены катушки обмотки возбуждения 7 и выходной обмотки 8 и 9. Последняя представляет собой две встречно включенные катушки 8 и 9 крайних стержней 4 и 6 магнитопровода 3. Ш-образнмй магнитопровод 3 выполнен из ферромагнитного материала. Грани 10 магнитопровода 3, кроме выходящих в рабочий воздушный зазор 11, имеют покрытие 12 из материала с малым электросопротивлением, при этом покрытие 12 имеет разрьгоы на одном иди нескольких ребрах ГЗ. Ротор 1 выполнен также из ферромагнитного материала с покрытием 15 граней, кроме выходящих в воздушный зазор П. Покрытие 14 имеет разрывы на одном или нескольких ребрах 16,
Датчик работает следующим образом.
При подач-е напряжения на обмотку возбуясдения 7 статора 2 возникает магяитшай поток, наводящий ЭДС в катуижах выходной обмотки 8 и 9. Яри симметричном относительно нейтральной оси О-О положении ротора в катушках 8 и 9 крайних стержней 4 и 6 наводятся равные по величине ЭДС, фазы которых противоположны за счет.встречного включения катушек 8 и 9. Это положение ротора 1 соответствует минимальному выходному сигналу и является нулевым положением выходной характеристики. Нулевое положение выходной характеристики отличается от геометрической нейтрали за счет погрешностей изготовления магнитопровода и наличия потоков рассеяния, влияние которых усиливается в случае вьшолнения датчика в минимальных габаритах. Покрытие маг
нитопровода материалом с малым удельным электросопротивлением приводит к ослаблению потоков рассеяния, наличие разрывов покрытия на ребрах исключает ослабление рабочего потока, проходящего через воздушньй зазор. Это приводит к совпаденшо нулевого положения датчика с геометрической нейтралью.
В отличие от известных в предлагаемом устройстве осуществляется полное экранирование всех потоков, кроме рабочего, через воздушный зазор.
При смещении ротора 1 от симметричного относительно оси 0-0 положения равенство магнитных проводимостей под крайними стержнями магнитопровода 3 нарушается, магнитный поток перераспределяется и наводит в катушках 8 и 9 обмотки разные по величине ЭДС, в результате чего наблюдается- нарастание выходного сигнала. Выходное напряжение катушек 8 и 9 обмотки определяется в соответствии с выра- жением
и.
-и
W,
где
W,
G -G 1 W. G +G
-напряжение питания;
-числа витков обмоток
(1)
5
Vi
и W,
выходной и возбуждения соответственно;
G и G - магнитные проводимости, определяемые выражением G, G
G
(2)
-I(3)
где GO - магнитная проводимость через, средний стержень;
- магнитные проводимости через крайние стержни.
При этом
г .- и - 1 &
а, р.
I+uG. (х);
1+uG, (х),
(4)
(5)
S
где FO - магнитная проницаемость воздуха;
а - ширина крайнего стержня;
1 - размеры Ш-образного магни- топровода в поперечном направлении;
X - смещение ротора от нейтрального положения;
S - величина воздушного зазора. Линейность выходной характеристики определяется степенью линейности
зависимости изменения магнитной проводимости от смещения ротора.
Отклонение от линейного закона происходит вследствие дополнительных потоков рассеяния, которым соответст- вугот проводимсэсти AG (х) и4С(х), имеющие нелинейную зависимость от перемещения X.
В предлагаемом устройстве осуществляется экранирование всех потоков рассеяния, кроме рабочего потока воз- дущного эазора, в том:числе и экранирование потоков, которым соответству- :ют магнитные проводимости ДО,(х) и ЛО,(х), и таким образом обеспечивается высокая линейность выходной характеристики.
Уменьшение реактивного момента достигается за счет уменьшения зав-и- симости суммарной магнитной прово- д№юсти от положения якоря. « Величина реактивного момента определяется выражением
м- Ф ci(G,+G) - 2 (G +GJ аы
(6)
1 где - магнитный поток;
6i - угол поворота ротора; G иG - магнитные проводимости через
крайние стержни, выражения для кото1 ---..
рых приведены выше.
После подстановки выражен ий (4) и (5)в выражение (6) получают
,(x))
М
dx
, (x)+uGjx)J
(7)
В предлагаемом устройстве сводятся к минимуму члены &G, (х) и ), зависимые от перемещения х, что приводит к уменьшению производной
aG,(x)-HaG(x)
d dx
за счет чего достигается реактивного момента М.
уменьшение
Уменьшение реактивного момента и улучшение линейности выходного на- 50 пряжения приводят к уменьшению расхождения нулевых значений реактивного момента и выходной характеристики, что способствует повышению точности.
Степень ослабления реактивного мо-55 мента определяется толщиной экранируемого покрытия, его материалом И рабочей частотой питающего напряжения.
5 tot5
20
5
0
С достаточной степенью точности коэффициент К ослабления реактивного момента определяется выражением
М Н
М - реактивный момент датчика с покрытием;
Нд - реактивный момент датчика без покрытия
Н - напряженность магнитного поля на границе магнитопровода с покрытием;
Нд - напряженность магнитного поля на границе магнитопровода без покрытия.
Наличие экрана приводит к ослаблению магнитного поля, так что на расстоянии Z напряженность магнитного поля Н определяется соотношением
,
при этом на расстоянии, равном длине волны Л , т.е. при
7-А- 2
происходит практически полное эЛра- нирование.
При 2 U ослабление магнитного поля происходит в соответствии с соот- ношени м .,.
I f
--НР
гтт
40
45
35 (
Ослабление реактивного м «ента определяется выражением . .. М Н -2Wnff..v
-м:-н7
где л- толщина покрытия;
р- магнитная проницаемость материала ; покрытия ; f электропроводность материала
покрытия.
Отсюда толщина покрытия выбирается из соотношения 1пК
д 2j Tr:fpy
При использовании в качестве материала с малым удельным электросопротивлением меди т Гн
р 4П10- -- ;
,8 10 |-.
а толщина покрытия определяется выражением
-1пК 1пК
2 nf4Tr 10- 5,8- l6 9,6П|
Формула изобретения
1. Датчик угловых перемещений, содержащий ферромагнитньй ротор, статор с Ш-обраэнь м магнитопроводом, на среднем стержне которого размещен обмотка возбуждения, а на крайних стержнях - катушки выходной обмотки, включенные встречно, о т л и ч а ю- щ и и с я тем, что, с целью повышения точности путем уменьшения реактивного момента и ухода нулевых значений реактивного момента и выходного напряжения, поверхности маг- нитопровода ротора и статора, кроме ребер и поверхностей, выходящих з рабочий зазор, покрыты материалом с малым удельным электросопротивлением, а толщина покрытия выполнена по соотношению
2/Rf
|где р - магнитная проницаемость материала покрытия;
f - частота питающего напряжения;
электропроводность материала покрытия;
коэффициент уменьшения
у М
-
реактивного момента;
Mj, - реактивный момент датчика без покрытия;
М - реактивный момент датчика с покрытием f
2. Датчик по п. 1, о т л и - ч а 10 щ и и с я тем, что в качвст- ве материала покрытия использована
медь.
/
/4
в Фиг. /
Составитель в. Трегубов Редактор Л. Повхан Техред Л.Сердюкова Корректор В. Бутяга
Заказ 2977/46 Тираж 705Подписное
ВНЙИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб.-, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
/ff
fPus.B
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения реактивного момента трансформаторных датчиков угла | 1979 |
|
SU905668A1 |
| Датчик угловых перемещений | 1984 |
|
SU1245869A1 |
| Устройство для обнаружения короткозамкнутых витков в обмотках электрических машин | 1979 |
|
SU928258A1 |
| ЭЛЕКТРОМАШИННЫЙ ИМПУЛЬСНЫЙ ФАЗОВРАЩАТЕЛЬ | 2019 |
|
RU2720352C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2673587C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| ДАТЧИК УГЛА | 1971 |
|
SU309242A1 |
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
| МАШИННО-ТРАНСФОРМАТОРНЫЙ АГРЕГАТ | 1995 |
|
RU2096893C1 |
| РАДИАЛЬНЫЙ СИНХРОННЫЙ ГЕНЕРАТОР | 2013 |
|
RU2558661C2 |
Изобретение относится к области измерительной техники и может быть использовано в системах автоматического контроля и регулирования. Цель изобретения - повьппение точности контроля. Датчик (Д) содержит ферромагнитный ротор, статор с Ш-образным магнитопроводом, на среднем стержне которого размещена обмотка возбужде на крайних стержнях - катушки выходной обмотки, включенные встречно . Поверхности магнитопровода ротора и статора, кроме ребер и поверхностей, выходящих в рабочий зазор, покрыты материалом с малым удельным электросопротивлением, причем толщина покрытия Л выполнена по соотно- шёншо и -1пК/2 /1Г где f - частота питающего напряжения, f4- магнитная прочищаемрсть материала покрытия; V злектропроводность материала; К -коэффициент уменьшения реактивного момента. В изобретекии осуществляется экранирование всех потоков рассеяния, кроме рабочего потока, что обеспечивает высокую линейность выходной характеристики. Уменьшение реактивного момента и улучшение линейности выходного напряжения приводят к уменьшению расхождения нуле- В1ЛХ значений реактивного момента и выходной характеристики, что повышает точность. I з.п. ф-лы, 2 ил. W to оэ 4 Ю СД
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 0 |
|
SU389403A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ДАТЧИК УГЛА | 0 |
|
SU309242A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
