Изобретение относится к управлению направлением оптического излучения и может быть использовано при обработке графической информации, автоматическом фотомет- рировании оптических изображений вводе и выводе графической информации в электронных цифровых вычислительных машинах, в системах стабилизации поля зрения при построении лазерных дисплеев и маркеров различного назначения, устройств контроля на их основе.
Целью изобретения является повышение точности и улучшение динамических характеристик.
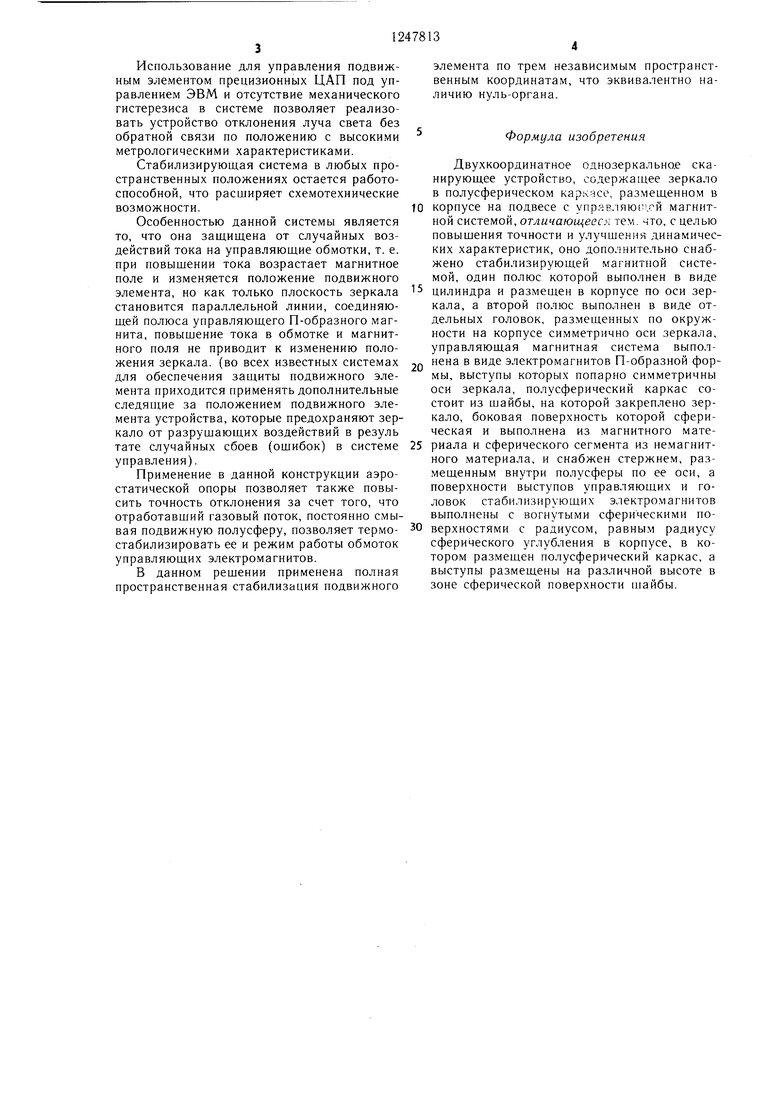
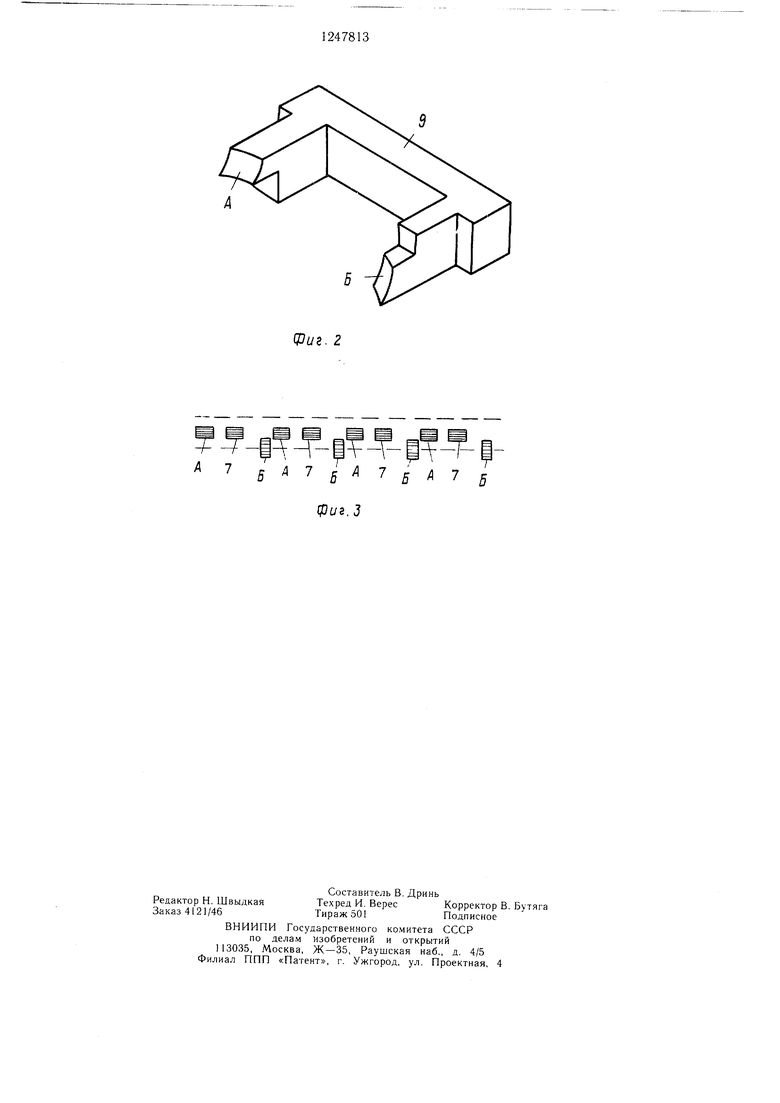
На фиг. 1 схематически изображено двух- координатное однозеркальное сканирующее устройство; на фиг. 2 - магнитопровод управляющего магнита; на фиг. 3 - положение полюсов управляющих магнитов на развертке экваториальной зоны подвижного маг- нитопровода.
Устройство состоит из зеркала 1, установленного в полусфере 2, в которой стержень 3 шайба 4 и экваториальная зона 5 полусферы 2 образуют подвижный магнитопровод, стабилизирующего электромагнита с первым полюсом 6, вторыми полюсами 7 и обмот10
15
20
При подаче напряжения в обмотку стабилизирующего электромагнита возникают усилия в направлении полюсов магнита, усилия на полюсах 7 (фиг. 3) взаимно компенсируются.
Усилие на другом полюсе обеспечивает силовое замыкание в шаровой опоре. При качении подвижной полусферы в пределах рабочего угла полюсы 7 (фиг. 3) не выходят за пределы экваториальной зоны подвижного магнитопровода и рабочее сечение магнитопровода на этой поверхности не меняется. Вместе с тем рабочее сечение в торце стержня 3 при любом наклоне уменьшается, что приводит к появлению момента (усилия), возвращающего полусферу в исходное положение.
При подаче напряжения на обмотку П- образного управляющего электромагнита появляется усилие, смещающее подвижную полусферу в сторону увеличения сечения магнитопровода в зазоре. Одновременно при наклоне подвижной полусферы появляется возвращающее усилие, вызванное стабилизирующим электромагнитом. При этом величина этого усилия зависи от двух параметров: угла наклона подвижной полусферы и
в виде 12 для
30
кой 8, П-образного управляющего электро- 25 величины тока в обмотке стабилизирующего электромагнита. Это возвращающее усилие всегда направлено к нормальному положению подвижного элемента, а значит, изменяя ток в обмотке стабилизирующего электромагнита, можно менять масштаб сканирования.
Полжение полусферы при этом определяется равновесием управляющего усилия и реакции стабилизирующего электромагнита.
Управляющие магниты могут включаться поодиночке и в комбинации.
В конструкции коаксиальная часть стабилизирующего электромагнита выполнена дискретным образом в виде четырех отдельных головок, а для предотвращения вращения подвижной полусферы относительно нор- .мальной оси в экваториальной части полусферы выполнены углубления симметрично относительно мест сопряжения второго полюса стабилизирующего электромагнита и полусферы.
магнита 9 с обмоткой 10, корпуса шарового сегмента 11 с отверстием подачи газа.
Толщин а шайбы 4L в месте сопряжения со стержнем должна удовлетворять условию
L, где D - диаметр стержня. Это необходимо для сохранения эффективного рабочего сечения магнитопровода полусферы.
При этом торце полюс стабилизирующего электромагнита, введенного в корпус, должен быть выполнен с диаметром, равным диаметру центральной части полусферы. В этом случае существует единственное положение, к которому стре.мится подвижная полусфера,и в котором сопротивление магнитному потоку минимальное.
Торцы-полюса П-образного управляющего электромагнита (на фиг. 2 обозначены А и Б) выполнены с разновысокими уступами для управления положением подвижной полусферы. Полюс А при наклоне полусферы не выходит за пределы экваториальной зоны и сопротивление магнитному потоку остается постоянным. Полюс Б в исходном положении подвижной полусферы находится почти полностью за пределами экваториальной зоны.
Устройство работает следующим образом.
Магнитопровод, включающий стержень 3, шайбу 4 и экваториальную зону 5 полусферы 2, выполненный из магнитопроводящего материала, обеспечивает взаимодействие подвижной полусферы с магнитным полем стабилизирующего б, 7 и управляюпдих магнитов 9, т. е. замыкает магнитный поток стабилизирующего и управляющего электромагнитов, чем обеспечивается взаимодействие.
35
40
Это приводит к устранению вращения полусферы относительно нормальной оси, что также повышает точность (в известном устройстве при отсутствии такой стабилизации возникает неоднозначность положеjg ния сканирующего пятна, вызванная неперпендикулярностью отражающей поверхности зеркала к нормальной оси сегмента).
Устранение вращения позволяет значительно снизить требования к сборке устройст
55 ва. При этом неперпендикулярность отражающей поверхности зеркала к оси стержня приводит лии1Ь к постоянно.му начальному смещению сканирующего пятна.
При подаче напряжения в обмотку стабилизирующего электромагнита возникают усилия в направлении полюсов магнита, усилия на полюсах 7 (фиг. 3) взаимно компенсируются.
Усилие на другом полюсе обеспечивает силовое замыкание в шаровой опоре. При качении подвижной полусферы в пределах рабочего угла полюсы 7 (фиг. 3) не выходят за пределы экваториальной зоны подвижного магнитопровода и рабочее сечение магнитопровода на этой поверхности не меняется. Вместе с тем рабочее сечение в торце стержня 3 при любом наклоне уменьшается, что приводит к появлению момента (усилия), возвращающего полусферу в исходное положение.
При подаче напряжения на обмотку П- образного управляющего электромагнита появляется усилие, смещающее подвижную полусферу в сторону увеличения сечения магнитопровода в зазоре. Одновременно при наклоне подвижной полусферы появляется возвращающее усилие, вызванное стабилизирующим электромагнитом. При этом величина этого усилия зависи от двух параметров: угла наклона подвижной полусферы и
величины тока в обмотке стабилизирующего электромагнита. Это возвращающее усилие всегда направлено к нормальному положению подвижного элемента, а значит, изменяя ток в обмотке стабилизирующего электромагнита, можно менять масштаб сканирования.
Это приводит к устранению вращения полусферы относительно нормальной оси, что также повышает точность (в известном устройстве при отсутствии такой стабилизации возникает неоднозначность положения сканирующего пятна, вызванная неперпендикулярностью отражающей поверхности зеркала к нормальной оси сегмента).
Устранение вращения позволяет значительно снизить требования к сборке устройст
ва. При этом неперпендикулярность отражающей поверхности зеркала к оси стержня приводит лии1Ь к постоянно.му начальному смещению сканирующего пятна.
Использование для управления подвижным элементом прецизионных ЦАП под управлением ЭВМ и отсутствие механического гистерезиса в системе позволяет реализовать устройство отклонения луча света без обратной связи по положению с высокими метрологическими характеристиками.
Стабилизирующая система в любых пространственных положениях остается работоспособной, что расширяет схемотехнические возможности.
Особенностью данной системы является то, что она защищена от случайных воздействий тока на управляющие обмотки, т. е. при повыщении тока возрастает магнитное поле и изменяется положение подвижного элемента, но как только плоскость зеркала становится параллельной линии, соединяющей полюса управляющего П-образного магнита, повыщение тока в обмотке и магнитного поля не приводит к изменению поло10
15
элемента по трем независимым пространственным координатам, что эквивалентно наличию нуль-органа.
Формула изобретения
Двухкоординатное однозеркально.е сканирующее устройство, содержащее зеркало в полусферическом каркасе, размещенном в корпусе на подвесе с упрявляю ой магнитной системой, отличающееся тем. что, с целью повышения точности и улучщения динамических характеристик, оно дополнительно снабжено стабилизирующей магнитной системой, один полюс которой выполнен в виде цилиндра и размещен в корпусе по оси зеркала, а второй полюс выполнен в виде отдельных головок, размещенных по окружности на корпусе симметрично оси зеркала, управляющая магнитная система выполжения зеркала, (во всех известных системах JQ ча в виде электромагнитов П-образной фордля обеспечения защиты подвижного элемента приходится применять дополнительные следящие за положением подвижного элемента устройства, которые предохраняют зеркало от разрущающих воздействий в резуль
мы, выступы которых попарно симметричны оси зеркала, полусферический каркас состоит из щайбы, на которой закреплено зеркало, боковая поверхность которой сферическая и выполнена из магнитного матетате случайных сбоев (ощибок) в системе 25 риала и сферического сегмента из немагнит- управления) .
Применение в данной конструкции аэростатической опоры позволяет также повысить точность отклонения за счет того, что отработавщий газовый поток, постоянно смыного материала, и снабжен стержнем, размещенным внутри полусферы по ее оси, а поверхности выступов управляющих и головок стабилизирующих электромагнитов выполнены с вогнутыми сферическими новая подвижную полусферу, позволяет термо- 0 верхностями с радиусом, равным радиусу стабилизировать ее и режим работы обмоток сферического углубления в корпусе, в ко- управляющих электромагнитов. В данном рещении применена
полная пространственная стабилизация подвижного
тором размещен полусферический каркас, а выступы размещены на различной высоте в зоне сферической поверхности шайбы.
элемента по трем независимым пространственным координатам, что эквивалентно наличию нуль-органа.
Формула изобретения
Двухкоординатное однозеркально.е сканирующее устройство, содержащее зеркало в полусферическом каркасе, размещенном в корпусе на подвесе с упрявляю ой магнитной системой, отличающееся тем. что, с целью повышения точности и улучщения динамических характеристик, оно дополнительно снабжено стабилизирующей магнитной системой, один полюс которой выполнен в виде цилиндра и размещен в корпусе по оси зеркала, а второй полюс выполнен в виде отельных головок, размещенных по окружности на корпусе симметрично оси зеркала, правляющая магнитная система выпол ча в виде электромагнитов П-образной в виде электромагнитов П-образной формы, выступы которых попарно симметричны оси зеркала, полусферический каркас состоит из щайбы, на которой закреплено зеркало, боковая поверхность которой сферическая и выполнена из магнитного материала и сферического сегмента из немагнит-
ного материала, и снабжен стержнем, размещенным внутри полусферы по ее оси, а поверхности выступов управляющих и головок стабилизирующих электромагнитов выполнены с вогнутыми сферическими новерхностями с радиусом, равным радиусу сферического углубления в корпусе, в ко-
верхностями с радиусом, равным радиусу сферического углубления в корпусе, в ко-
тором размещен полусферический каркас, а выступы размещены на различной высоте в зоне сферической поверхности шайбы.
Vus. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| КЛАПАН ВОЗДУХОЗАБОРНИКА | 2021 |
|
RU2775763C1 |
| Устройство для отклонения оптического луча | 1987 |
|
SU1569787A1 |
| ПОЛЯРИЗОВАННЫЙ ДВУСТАБИЛЬНЫЙ ДЛИННОХОДОВОЙ ЭЛЕКТРОМАГНИТ СО СДВОЕННОЙ ПОСЛЕДОВАТЕЛЬНОЙ МАГНИТНОЙ ЦЕПЬЮ | 2018 |
|
RU2683575C1 |
| ЭЛЕКТРОПРИВОД С ПЛАНЕТАРНЫМ ЦИКЛОИДАЛЬНЫМ РЕДУКТОРОМ | 2000 |
|
RU2206805C2 |
| Сканирующее устройство | 1987 |
|
SU1571533A1 |
| СФЕРИЧЕСКИЙ ЭЛЕКТРОДВИГАТЕЛЬ С ГАЗОСТАТИЧЕСКИМИ ПОДШИПНИКАМИ | 2020 |
|
RU2756523C1 |
| Поляризованный электромагнит | 2019 |
|
RU2713626C1 |
| Устройство для управления | 2020 |
|
RU2730081C1 |
| Магнитоупругий датчик | 1980 |
|
SU924526A1 |
| ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2021 |
|
RU2807211C2 |
Изобретение относится к области управления направлением оптического излучения и позволяет повысить точность, улучшить динамические характеристики устройства. Для этого в него введена стабилизирующая магнитная система, полюс 6 которой представляет собой цилиндр, размещенный по оси зеркала 1. Второй полюс 7 выполнен в виде отдельных головок, размещенных по окружности. Стабилизирующая магнитная система вызывает появление возвращающего усилия при наклоне полусферы 2, что позволяет менять масштаб сканирования изменением тока в обмотке 8. Торцы П-образного магнита 9 управляющей системы имеют разновысокие уступы для управления положением полусферы 2 с зеркалом 1, закрепленным на шайбе 4. 3 ил. гчэ 00 оо
фиг. 3
| Устройство для прецизионного отклонения оптического луча | 1982 |
|
SU1068872A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
