Изобрете-ше относится к устройствам автоматического контроля и поверки изделий измерите тьной техники и автоматики и может быть использовано для имитации выходных сигналов синусно-косинусного трансформаторного датчика угла на стендах, управляемых ЦВМ.
Известно устройство для моделирования синусно-косинусного трансформатор- ного датчика, содержащее формирователи текущего значения тригонометрической функ- ций источник эталонного напряжения переменного токэ, блоки задания начальных условий, дешифратор код квадранта, генератор тактовых импульсов, триггер, два коммутатора, реверсивный счетчик, управляемый делитель, переключатель полярности, дешифратор элемент ИЛИ.
Недостатком данного устройства явля ется появление динамических ошибок при имитации углопых перемещений, изменяющихся во времени по сложным законам и и широком диапазоне угловых скоростей. Это связано с тем, что процессы ввода кодов синуса, косинуса и знаков функций в устройстве не синхронизированы и могут происходить в случайной последовательности.
Наиболее близким по технической сущности к изобретению является устройство для моделирования синусно-косинусного вращающегося трансформатора, выбранное за прототип, содержащее управляющую ЦВМ, два регистра, буферный регистр, два кодоуправляемых делителя, два переключателя полярности, сумматор, генератор эталонного сигнала, коммутатор, два элемента задержки, одновибратор, причем шина данных управляющей ЦВМ подключена к информационному входу первого регистра, управляющий выход первого регистра соединен со входом первого переключателя полярности, генератор эталонного сигнала
сл
с
VJ
00 4
О Qv
подключен к сигнальным входам первого и второю кодоуправляемых делителей, выход второго кодоуправляемого делителя соединен со входом второго переключателя полярности, выход которого является выходом устройства 2.
В прототипе 2, по Сравнению с аналогом, устранена динамическая погрешность, появляющаяся при переходе от одного фиксированного значения угла к другому.
Недостатком прототипа 2 и аналога 1 является низкая точность формирования выходных сигналов в режиме установки фиксированных значений углов, то есть в статическом режиме.
Это вызвано наличием у кодоуправляемых делителей инструментальных погрешностей: интегральной и дифференциальной нелинейностей, прохождения сигнала на выход через паразитную емкость резистив- ной матрицы, температурного изменения коэффициента передачи и т.д. В результате этого в статическом режиме на выходах устройства вместо двух переменных напряжений
Ui Еэт sin a
U2 E3TCOS«(1)
формируются напряжения
Ui Еэт sin a ± АЕэт1
U21 Еэт cos а ± Д ЕЭт2(2)
В формулах (1) и (2) ЕЭт Еэтт sin (a t - выходное напряжение генератора эталонного сигнала частоты м а- заданное значение имитируемого угла; ДЕЭт1 АЕЭт1т sin «У t, А Еэт2 А Еэт2т sin со t - погрешности формирования сигналов в каналах синуса и косинуса, обусловленные инструментальными погрешностями кодоуправляемых делителей.
Значение угла, которому соответствуют формируемые устройством напряжения Dr и Ua , определяется по алгоритму
« arctg.
где F(Ui) и F(U2) - в общем случае функционалы от напряжения Ui и U2 - их амплитудное, среднее или действующее значения.
При подстановке (2) в (3) видно, что устройство имитирует угол с погрешностью Да а1 - а, где а1 - значение угла, получаемое при подстановке (2) в (3).
Цель изобретения - повышение точности моделирования синусно-косинусного трансформаторного датчика.
Указанная цель достигается тем, что в устройство для моделирования синусно-косинусного трансформаторного датчика угла, содержащее блок задания исходных параметров тригонометрических функций,
регистр кода синуса угла и регистр кода косинуса угла, б/ферный регистр, первый и второй кодоуправляемые делители, сумматор кода синуса угла, генератор эталонных
5 сигналов, первый и второй переключатели полярности, коммутатор кодов тригонометрических функций, первый и второй элементы задержки и одновибратор, выход первого кодоуправляемого делителя подключен к
10 информационному входу первого переключателя полярности, выход которого является выходом синусных значений моде- пируемых сигналов устройства, выход данных блока задания исходных параметров
15 тригонометрических функций подключен к информационному входу регистра кода синуса угла, выход которого соединен с управляющим входом первого переключателя полярности, выход генератора эталонных
20 сигналов подключен к управляющим входам первого кодоуправляемого делителя и второго кодоуправляемого делителя, выход которого соединен с информационным входом второго переключателя полярности,
25 выход буферного регистра подключен к управляющему входу второго переключателя полярности, выход которого является выходом косинусных значений моделируемых сигналов устройства, в отличие от прототи30 па введены регистр кода тангенса угла и регистр кода котангенса угла, второй и третий буферные регистры, дешифратор адреса, регистр выбора режимов задания значений угла, первый и второй ключи, пер35 вый и второй триггеры, однополярный амплитудный детектор, аналого-цифровой, преобразователь, счетчик тактов моделирования, первый и второй делители, первый и второй мультиплексоры, первый и второй
40 компараторы, первый и второй элементы ИЛИ, регистр памяти этапов моделирования, третий и четвертый элементы задержки, реверсивный счетчик и датчик кода единицы, выход синхронизации и выход ко45 дов адреса блока задания исходных параметров тригонометрических функций подключен к управляющему входу и информационным входам дешифратора адреса соответственно, выход данных блока задания
50 исходных параметров тригонометрических функций .соединен с информационными входами регистров кода косинуса угла, тангенса угла и котангенса угла, информационными входами регистра памяти этапов
55 моделирования и регистра выбора режимов задания значений угла, первый выход дешифратора адреса соединен с управляющими входами регистра кода синуса угла, первого ключа и регистра выбора режимов задэния значений угла, выход которого подключей к информационному входу первого ключа, выход которого соединен с установочным входом регистра памяти этапов моделирования и первым входом первого элемента ИЛИ, выход которого подключен к единичному входу первого триггера, прямой выход которого соединен с первым управляющим входом коммутатора кодов тригонометрических функций и первым входом второго элемента ИЛИ, выход которого через первый элемент задержки подключен к управляющему входу аналого-цифрового преобразователя, выход которого соединен с входом установки в ноль однополярного амплитудного детектора и с суммирующим входом счетчика тактов моделирования, первый выход которого соединен с входом разрешения записи второго буферного регистра, нулевым входом первого триггера и единичным входом второго триггера, прямой выход которого подключен к второму входу второго элемента ИЛИ и второму управляющему входу коммутатора кодов тригонометрических функций, выход которого соединен с входом амплитудного детектора, выход которого подключен к информационному входу аналого-цифрового преобразователя, группа выходов которого соединена с информационными входами второго и третьего буферных регистров, группа выходоэ второго буферного регистра подключена к первым группам входов первого и второго делителей, группа выходов третьего буферного регистра соединена с вторыми группами входов первого и второго делителей, второй, третий, четвертый и пятый выходы дешифратора адреса подключены соответственно к входам разрешения записи первого буферного регистра, регистра кода косинуса угла, регистра кода котангенса угла и регистра памяти этапов моделирования, шестой выход дешифратора адреса соединен с входом разрешения записи регистра кода тангенса угла и установочным входом реверсивного счетчика, выход которого подключен к первой группе входов сумматора кодов синуса угла, вторая группа входов которого соединена с группой выходов регистра кода синуса угла, а выход - подключен к группе информационных входов первого кодоуправляемого делителя, выход и группа выходов регистра кода косинуса угла соединены с соответствующими входами первого буферного регистра, группа выходов которого подключена к группе информационных входов второго кодоуправляемого делителя, выходы регистра кода тангенса угла и регистра кода котангенса угла соединены соответственно с первым и вторым информационными входами первого мультиплексора, выход которого подключен к первой группе входов первого компаратора, выходы Меньше и Больше которого соединены с вычитающим и суммирующим входами реверсивного счетчика соответственно, выход Равно первого компаратора подключен к единичному входу регистра памяти этапов моделирования и через одновибратор соединен с
0 первым входом второго ключа, выход которого соединен с вторым входом первого элемента ИЛИ, второй выход сметчика тактов моделирования подключен к входу разрешения записи третьего буферного регистра
5 и входу второго элемента задержки, выход которого соединен с входами установки в ноль второго и третьего буферных регистров, управляющим входом второго компаратора и входом третьего элемента задержки,
0 выход которого подключен к управляющему входу первого компаратора и входу четвертого элемента задержки, выход которого соединен со вторым входом второго ключа и нулевым входом второго триггера, выходы
5 первого и второго переключателей полярности подключены соответственно к первому и второму информационным входам коммутатора кодов тригонометрических функций, группа выходов первого делителя соедине0 на с первой группой входов второго мульти- плексора, группа выходов которого подключена к второй группе входов первого компаратора, группа выходов второго делителя соединена со второй группой входов
5 второго мультиплексора и первой группой входов второго компаратора, вторэя группа входов которого подключена к выходам датчика кода единицы, а выход - соединен с управляющими входами первого и второго
0 мультиплексоров.
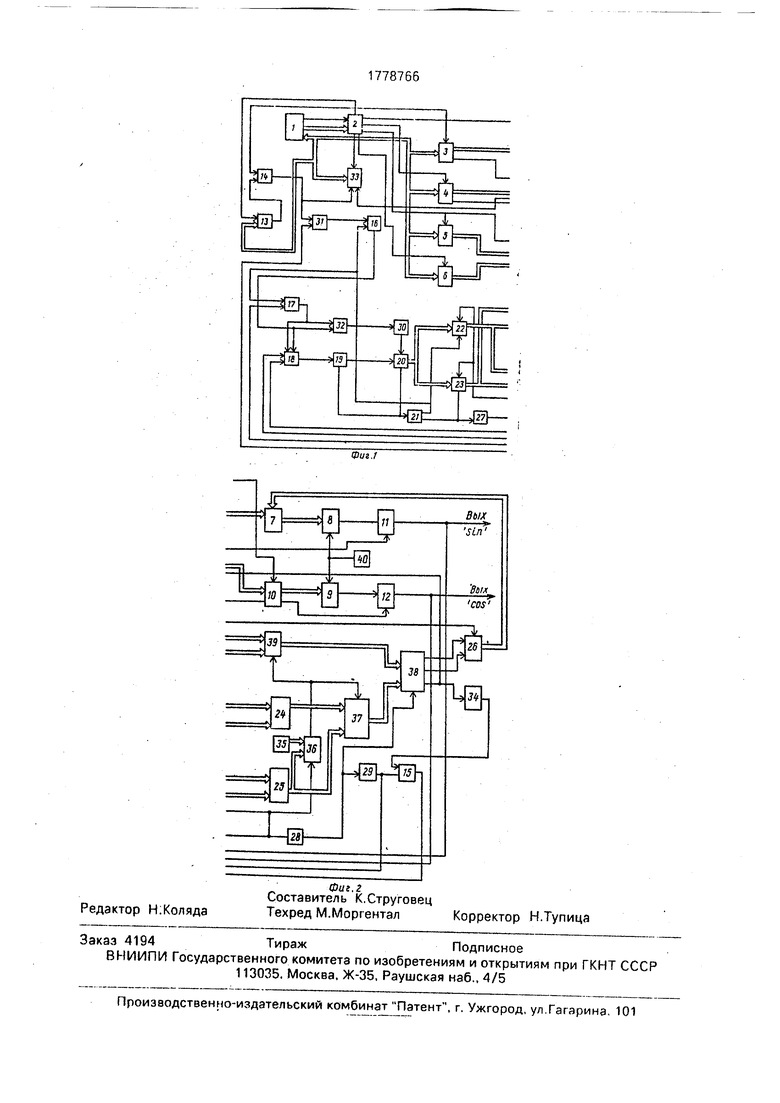
На фиг. 1 и 2 представлена структурная схема устройства для моделирования синус- но-косинусного трансформаторного датчика угла. Устройство содержит блок задания
5 исходных параметров тригонометрических функций 1, дешифратор адреса 2, регистр кода синуса угла 3, регистр кода косинуса угла 4, регистр кода тангенса угла 5, регистр кода котангенса угла 6. буферные регистры
0 10, 22, 23, сумматор кода синуса угла 7, кодоуправляемые делители 8 и 9, переключатели полярности 11, 12, регистр выбора режимов задания значений угла 13, ключи 14, 15, триггеры 16, 17, коммутатор кодов
5 тригонометрических функций 18, однопо- лярный амплитудный детектор 19, аналого- цифровой преобразователь 20, счетчик тактов моделирования 21, делители 24, 25, реверсивный счетчик 26, элементы задержки 27, 28, 29, 30, элементы ИЛИ 31, 32, рзгистр памяти этапов моделирования 33, од- новибратор 34, датчик кода единицы 35, компараторы 36, 38, мультиплексоры 37,39, генератор эталонного сигнала 40.
Устройство работает следующим образом.
В зависимости от выбора режима работы по команде с блока задания исходных параметров тригонометрических функций 1 производится установка регистра выбора режимов задания значений угла 13.
В режиме непрерывного изменения угла в регистре выбора режимов задания зна- ченийугла 13 по шине данных записывается О, в режиме фиксированных значений угла . Выходной сигнал регистра 13 управляет ключом 14: в состоянии регистра 1 ключ открыт, в состоянии О - закрыт.
Работа устройства в режиме фиксированных значений угла.
По шине данных с блока задания исходных параметров тригонометрических функций 1 в регистры 3,4,5,6 записываются тригонометрические функции угла в следующей последовательности: в регистр кода тангенса угла 5 записывается код тангенса угла, в регистр кода котангенса угла 6 записывается код котангенса угла, в регистр кода косинуса угла 4 - код косинуса угла, в регистр кода синуса угла 3 записывается код синуса угла. Запись кода в регистры 3-6 производится последовательно импульсами с дешифратора адреса 2. Импульсом, записывающим код тангенса угла в р.егистр кода тангенса угла 5, одновременно производится обнуление реверсивного счетчика 26, в результате с его выхода на вход сумматора кода синуса угла 7 поступает нулевой код. Одновременно с записью кода синуса в регистр кода синуса угла 3 записывающий импульс производит перезапись кода косинуса угла из регистра кода косинуса угла 4 в буферный регистр 10. Тем самым достигается одновременная смена кодов синуса и косинуса, поступающих на кодоуправляемые делители 8 и 9. Первые N разрядов кодов тригонометрических функций определяют их значения, a (N+1)-e разряды определяют знаки.
С выходов регистров 3 и 10 по N разрядов кодов синуса и косинуса угла соответственно подаются на управляющие входы кодоуправляемых делителей 8 и 9, а знаковые разряды - соответственно на управляющие входы переключателей полярности 11 и 12, В результате этого на выходах делителей 8 и 9 устанавливаются переменные напряжения, пропорциональные синусу и косинусу заданного угла. Источником переменного напряжения является генератор
эталонного сигнала 40, напряжение с выхода которого подается на аналоговые входы делителей 8 и 9.
С выходов кодоуправляемых делителей
8 и 9 сформированные напряжения поступают на входы переключателей полярности 11 и 12, которые либо пропускают входные сигналы на свои выходы без изменения фазы, либо изменяют ее на 180°. Управление пе0 реключателямиполярности 11 и осуществляется сигналами, поступающими с (N+1)-x разрядов регистров 3 и 10. В результате этого на выходах устройства sin и cos формируются два напряжения, описываемые
5 выражениями (2).
Одновременно с записью кода синуса в регистр кода синуса угла 3 записывающий импульс через открытый ключ 14 и логический элемент ИЛИ 31 устанавливает триггер
0 33 в О, а триггер 16 в 1. Единичный сигнал с выхода триггера 16 воздействует на первый управляющий вход коммутатора кодов тригонометрических функций 18 и через элемент ИЛИ 32 на вход первого элемента
5 задержки 30. В результате этого ко входу амплитудного детектора 19 коммутатор под- ключает выходной сигнал устройства, соответствующий каналу синуса.
В однополярном амплитудном детекто0 ре 19 фиксируется амплитудное значение напряжения канала синуса Ui (в положительный полупериод), которое подается на измерительный вход АЦП 20. После этого на запускающий вход АЦП 20 поступает им5 пульс с выхода элемента задержки 30. Результат преобразования АЦП поступает на входы буферных регистров 22 и 23 Импульс конца преобразования с выхода АЦП обнуляет амплитудный детектор 19, подготавли0 вая его к новому измерению, и одновременно поступает на счетный вход счетчика тактов моделирования 21. В результате этого на первом выходе счетчика появляется единичный импульс, который
5 производит запись результата преобразования АЦП в буферный регистр 22, одновременно сбрасывает триггер 16 в О и устанавливает триггер 17 в 1. Выходной единичный сигнал триггера 17 воздействует
0 на второй управляющий вход коммутатора кодов тригонометрических функций 18 и через элемент ИЛИ 32 на вход элемента задержки 30.
Коммутатор кодов тригонометрических
5 функций 18 подключает ко входу амплитудного детектора 19 выходной сигнал устройства, соответствующий каналу косинуса. В амплитудном детекторе 19 фиксируется амплитудное значение напряжения канала косинуса U2 (в положительный попупериод).
которое подается на измерительный вход АЦП 20. После этого на запускающий вход АЦП поступает импульс с выхода элемента задержки 30. После окончания преобразования сигнал конец преобразования с выхода АЦП 20 поступает на вход счетчика тактов моделирования 21. На втором выходе счетчика 21 появляется импульс, который записывает результат преобразования АЦП 20 в буферный регистр 23 и поступает на вход второго элемента задержки 27.
При поступлении кода из АЦП 20 в буферный регистр 23 в делителях 24 и 25 определяются соответственно котангенс
ctg
тангенс tg a
Ui
коды коUl 1)2
торых поступают на вход мультиплексора
37. Код тангенса tg о1 поступает одновременно на один из входов компаратора 36, на другой вход которого с помощью датчика кода единицы 35 подается код .
При tg и 1 выходной сигнал компаратора 36 управляет мультиплексорами 37 и 39
так, что на их выходы проходят коды tg а и tg «соответственно. Эти коды поступают на входы компаратора 38.
При поступлении импульса со второго элемента задержки 28 на управляющий вход компаратора 38 в нем происходит сравнение двух кодов, соответствующих абсолютным значениям tg а и tg a. При условии tg d: tg а импульс появляется на первом выходе компаратора 38, который соединен с суммирующим входом реверсивного счетчика 26. При условии tg и tg а импульс появляется на втором выходе компаратора 38, соединенном с вычитающим входом счетчика 26. Код с выхода счетчика 26 поступает на второй вход сумматора кода синуса угла 7, где суммируется или вычитается с кодом синуса угла. В результате этого код синуса угла уменьшается или увеличивается на единицу младшего разряда, что приводит соответственно к уменьшению или увеличению амплитуды сигнала на выходе канала синуса.
Задержанный в элементе задержки 29 на время, требуемое для работы компаратора 38, импульс поступает на второй вход ключа 15 и на обнуляющий вход триггера 17. Триггер 17 устанавливается в О, коммутатор отключает выход канала косинуса от входа амплитудного детектора. Этот же импульс через открытый ключ 15 и элемент ИЛИ 31 поступает на устанавливающий вход триггера 16.
После этого весь описанный процесс
определения tg а повторяется иопределя ется его новое значение, соответствующее изменившемуся напряжению в канале сину- са. Процесс повторяется до тех пор, пока
значение tg ok не станет равным tgcz В этом случае на третьем выходе компаратора 38 появляется импульс, запускающий одновибратор 34. Импульс, вырабатываемый од- новибратором 34, закрывает ключ 15 на время, превосходящее время задержки элемента 39. Импульс с его выхода через ключ не проходит, и триггер 16 остается в состоянии О. Импульс, появляющийся на третьем выходе компаратора 38, при условии tg
о} - tg а, также устанавливает регистр памяти этапоз моделирования 33 в состояние 1. Состояние регистра 33 анализирует управляющая микро-ЭВМ, и его единичное состояние указывает на то, что сигналы на выходах устройства соответствуют заданному значению угла.
Необходимо отметить, что реализованный в устройстве принцип предполагает коррекцию значения напряжения только в канале синуса. Это объясняется тем, что информативными параметрами датчика угла являются не абсолютные значения синуса и
косинуса измеряемого угла, а их отношения, то есть тангенс и котангенс измеряемого угла; а для обеспечения точного значения отношения двух сигналов достаточно корректировать один из них.
При поступлении на вход компаратора
36кода tg d 1 с выходов мультиплексоров
37и 39 на вход компаратора 38 поступают коды котангенса имитируемого угла ctg аи
ctg a.. Тем самым исключается возможность
работы устройства в областях неограниченно больших значений функций тангенса и котангенса. Процесс дальнейшей работы устройства аналогичен описанному для случая
tg« 1.
Работа устройства в режиме непрерывного изменения угла.
В этом режиме в регистр выбора режимов задания значений угла 13 записывается
1. в результате этого ключ 14 находится в закрытом состоянии. Работа устройства по формированию выходных сигналов по законам 2 происходит так же, как в режиме фиксированных значений угла. Так как ключ 14
закрыт, изменения состояний блоков 15...39, связанных с определением значения tg о1 (или ctg а1) и сравнением его с заданным значением tg а, (или ctg а) не происходит.
Заявляемое устройство, по сравнению с прототипом 2, позволяет получить следующий положительный эффект.
Повышается точность моделирования выходных сигналов синусно-косинусного трансформаторного датчика угла в режиме установки фиксированных значений углов, Это достигается за счет того, что в предлагаемом устройстве по выходным сигналам в соответствии с алгоритмом (3) определяются действительные значения тангенса (или
котангенса) имитируемого угла tg d (или ctg d}, которые затем сравниваются с заданным значением tg «(или ctg «), и при наличии отклонения код на входе кодоуправляемого делителя изменяется так, чтобы свести это отклонение к нулю.
Определение имитируемого угла о1 в устройстве обеспечивается за счет определения амплитудного значения напряжений Ui и U2 и преобразования его в код с помощью одного и того же амплитудного детектора и АЦП. К этим блокам предъявляется лишь требование высокой линейности функции преобразования и ее стабильности по крайней мере на время двух измерений. В этом случае в делителе определяется частное (например, при изменении тангенса угла)
tgo«-,(4)
где Zi k U 1m1, Z2 kU2m - код на выходе АЦП, k - общий коэффициент передачи измерительного канала амплитудный детектор - АЦП. При соблюдении условия линейности измерительного канала в пределах погрешности линейности можно считать k const, тогда при подстановке Zi и Zz в (4) получаем точное значение тангенса угла а:
tgo -Uiml/U2ml
Формула изобретения Устройство для моделирования синусно-косинусного трансформаторного датчика угла, содержащее блок задания исходных параметров тригонометрических функций. регистр кода синуса угла, регистр кода косинуса угла, буф ерный регистр, первый и второй кодоуправяяемые делители, сумматор кода синуса угла, генератор эталонных сигналов, первый и второй переключатели полярности, коммутатор кодов тригонометрических функций, первый и второй элементы задержки, одновибратор, выход первого кодоуправляемого делителя подключен к информационному входу первого переключателя полярности, выход которого является выходом синусных значений моделируемых сигналов устройства, выход данных блока задания исходных параметров тригонометрических функций подключен к информационному входу регистра кода синуса угла, выход которого соединен с управляющим входом первого переключателя полярности, выход генератора эталонных сигналов подключен к управляющим входам первого кодоуправляемого делителя и второго кодоуправляемого делителя, выход которого соединен с ин0 формационным входом второго переключателя полярности, выход буферного регистра подключен к управляющему входу второго переключателя полярности, выход которого является выходом косинусных значений мо5 делируемых сигналов устройства, отличающееся тем, что, с целью повышения точности моделирования, оно содержит регистр кода тангенса угла и регистр кода котангенса угла, второй и третий буферные
0 регистры, дешифратор адреса, регистр выбора режимов задания значений угла, первый и второй ключи, первый и второй триггеры, сднополярный амплитудный детектор, аналого-цифровой преобразова5 тель, счетчик тактов моделирования, первый и второй делители, первый и второй мультиплексоры, первый и второй компараторы, первый и второй элементы ИЛИ, третий и четвертый элементы задержки,
0 регистр памяти этапов моделирования, реверсивный счетчик и датчик кода единицы, выход синхронизации и выход кодов адреса блока задания исходных параметров тригонометрических функций подключен к управ5 ляющему входу и информационным входам дешифратора адреса соответственно, выход данных блока задания исходных параметров тригонометрических функций соединен с информационными входами ре0 гистров кода косинуса угла, тангенса угла и котангенса угла, информационными входами регистра памяти этапов моделирования и регистра выбора режимов задания значений угла, первый выход дешифратора адре5 са соединен с управляющими входами регистра кода синуса угла, первого ключа и регистра выбора режимов задания значений угла выход которого подключен к информационному входу первого ключа,
0 выход которого соединен с установочным входом регистра памяти этапов моделирования и первым входом первого элемента ИЛИ, выход которого подключен к единичному входу первого триггера, прямой выход
5 которого соединен с первым управляющим входом коммутатора кодов тригонометрических функций и первым входом второго элемента ИЛИ, выход которого через первый элемент задержки подключен к управляю- щему входу аналого-цифрового преобразователя, выход которого соединен с входом установки в О однополярного амплитудного детектора и с суммирующим входом счетчика тактов моделирования, первый выход которого соединен с входом разрешения записи второго буферного регистра, нулевым входом первого триггера и единичным входом второго триггера, прямой выход которого подключен к второму входу второго элемента ИЛИ и второму управляющему входу коммутатора кодов тригонометрических функций, выход которого соединен с входом однополярного амплитудного детектора, выход которого подключен к информа- ционному входу аналого-цифрового преобразователя, группа выходов которого соединена с информационными входами второго и третьего буферных регистров, группа выходов второго буферного регистра подключена к первым группам входов первого и второго делителей, группа выходов третьего буферного регистра соединена с вторыми группами входов первого и второго делителей, второй, третий, четвертый и пятый выходы дешифратора адреса подключены соответственно к входам разрешения записи первого буферного регистра, регистра кода косинуса угла, регистра кода котангенса угла и регистра памяти этапов моделирования, шестой выход дешифратора адреса соединен с входом разрешения записи регистра кода тангенса угла и установочным входом реверсивного счетчика, выход которого подключен к первой группе входов су мматора кодов синуса угла, вторая группа входов которого соединена с : груп- почй7выходов регистра кода синуса угла, а выход подключен к группе информационных входов первого кодоуправляемого делителя, выход и группа выходов регистра кода косинуса угла соединены соответственно с входами первого буферного регистра, группа выходов которого подключена к группе информационных входов второго ко-.
доуправляемого делителя, выходы регистра кода тангенса угла и регистра кода котангенса угла соединены соответственно с первым и вторым информационными входами первого мультиплексора, выход которого подключен к первой группе входов первого компаратора, выходы Больше и Меньше которого соединены с вычитающим и суммирующим входами реверсивного счетчика
соответственно, выход Равно первого компаратора подключен к единичному входу регистра памяти этапов моделирования и через одновибратор соединен с первым входом второго ключа, выход которого соединен с вторым входом первого элемента ИЛИ, второй выход счетчика тактов моделирования подключен к входу разрешения записи третьего буферного регистра и входу второго элемента задержки, выход которого
соединен с входами установки о О второго и третьего буферных регистров, управляющим входом второго компаратора и входом третьего элемента задержки, выход которого подключен к управляющему входу первого компаратора и входу четвертого элемента задержки, выход которого соединен с вторым входом второго ключа и нулевым входом второго триггера, выходы первого и второго переключателей полярности подключены соответственно к первому и второму информационным входам коммутатора кодов тригонометрических функций, группа выходов первого делителя соединена с первой группой входов второго мультиплексора, группа выходов которого подключена к второй группе входов первого компаратора, группа выходов второго делителя соединена с второй группой входов второго мультиплексора и первой группой входов второго
компаратора, вторая группа входов которого подключена к выходам датчика кода единицы, а выход соединен с управляющими входами первого и второго мультиплексоров.
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Функциональный преобразователь угла поворота вала в код | 1989 |
|
SU1697266A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ТРИГОНОМЕТРИЧЕСКИХ ФУНКЦИЙ | 1993 |
|
RU2060549C1 |
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |
| Преобразователь угла поворота вала с контролем выходного кода | 1986 |
|
SU1334373A2 |
| Способ измерения рассогласования между углами поворота,один из которых задан кодом | 1985 |
|
SU1285595A1 |
| Преобразователь сигналов синусно-косинусного датчика угла в код | 1982 |
|
SU1034059A1 |
| Устройство для определения положения подвижного элемента шагового двигателя | 1988 |
|
SU1577067A1 |
| Преобразователь код-частота гармонического сигнала | 1984 |
|
SU1195449A2 |
| Преобразователь угол-код | 1984 |
|
SU1175033A1 |
Изобретение относится к области измерительной техники и автоматики. Цель изобретения - повышение точности моделирования. Для этого в устройство дополнительно введены регистр кода тангенса угла и регистр кода котангенса угла, второй и третий буферные регистры, дешифратор адреса, регистр выбора режимов задания значений угла, первый и второй ключи, первый и второй трип еры, однополярный амплитудный детектор, аналого-цифровой преобразователь, счетчик тактов моделирования, первый и второй делители, первый и второй мупьтиплексоры, первый и второй компараторы, первый и второй элементы ИЛИ третий и четвертый элементы задержки, регистр памяти этапов моделирования, реверсивный счетчик и датчик кода единицы, 2 ил.
| Устройство для моделирования синусно- косинусного трансформаторного датчика | 1978 |
|
SU741288A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования синусно-косинусного вращающегося трансформатора | 1982 |
|
SU1029192A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
