ОПИСАНИЕ ИЗОБРЕТЕНИЯ
к АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Подписная группа Л5 294 КРИВОШИПНЫЙ МЕХАНИЗМ С ИЗМЕНЯЕМЫМ РАДИУСОМ
Заявлено 9 июля 1958 г. за Ks 603559/25 в Комитет по делам } 3o6peTeniiii и открытий при Совете Министров СССР
Опубликовано в «Бюллетене изобретений Л 23 за 1959 г.
Кривошипные механизмы с изменяемым радиусом кривошипа, s которых используются винтовые пары и зубчатые колеса для изменения радиуса кривошииа, известны.
Однако такие механизмы не обеспечивают автоматической установки величины радиуса кривошипа в зависимости от положения управляющего органа.
Отличительной особенностью предложенного механизма является то, что гайка винтовой пары снабжена зубчатым коническим венцом, находящимся в зацеплении с двумя коническими колесами, установленными поворотно на валу с разных сторон гайки. Ступицы этих колес соединены постоянно шлицами с гайками, имеющилш противоположно направленные резьбы, сопрягаемые с соответствующими резьбами на валу.
На корпусе установлены на шлицах подвижно в осевом направлении две втулки, жестко соединенные между собой и являющиеся упразляющим органом. Эти втулки поочередно могут соединяться своими кулачками со щлицевыми гайками и фиксировать их угловое положение, что вызывает торможение одного из конических зубчатых колес и вращение гайки с коническим зубчатым венцом. Прп этом происходит изменение радиуса кривошииа и одновременно осевое перемещение шлицевой гайки до выхода ее из соединения с управляющей втулкой, после чего прекращается изменение радиуса кривошипа. Постоянство радиуса кривошипа сохраняется до тех пор, пока управляющие втулки не переместятся и одна из них не войдет в зацепление с шлицевой га11кой.
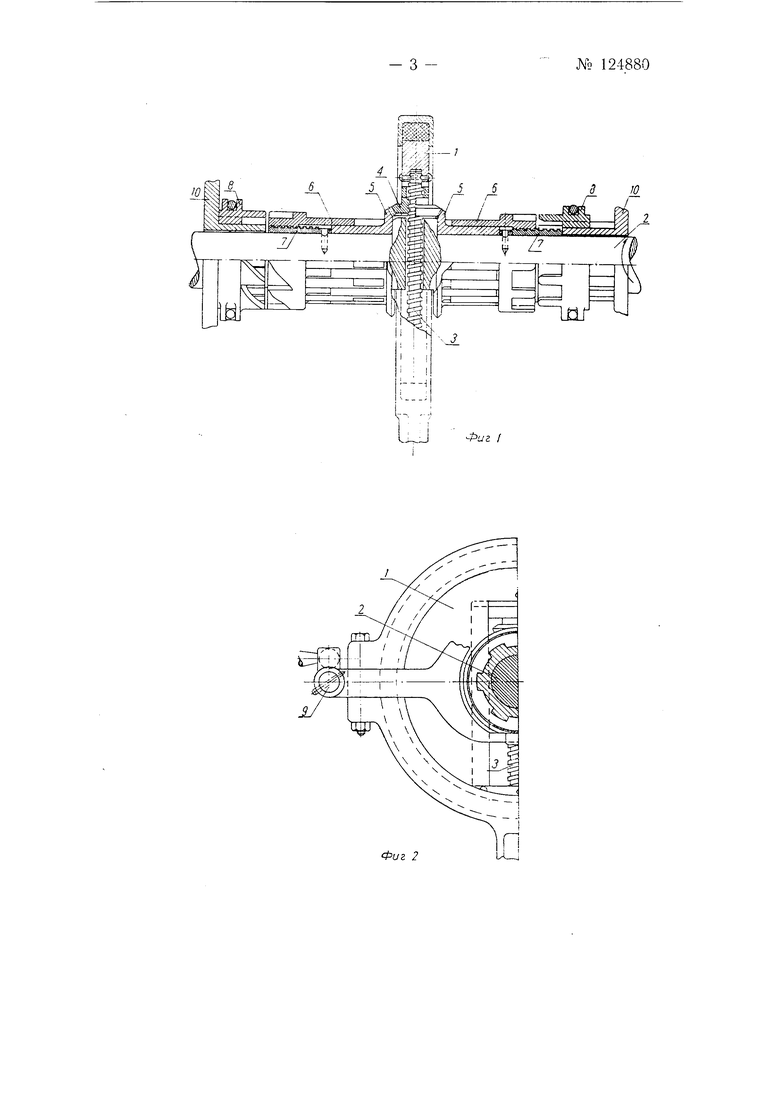
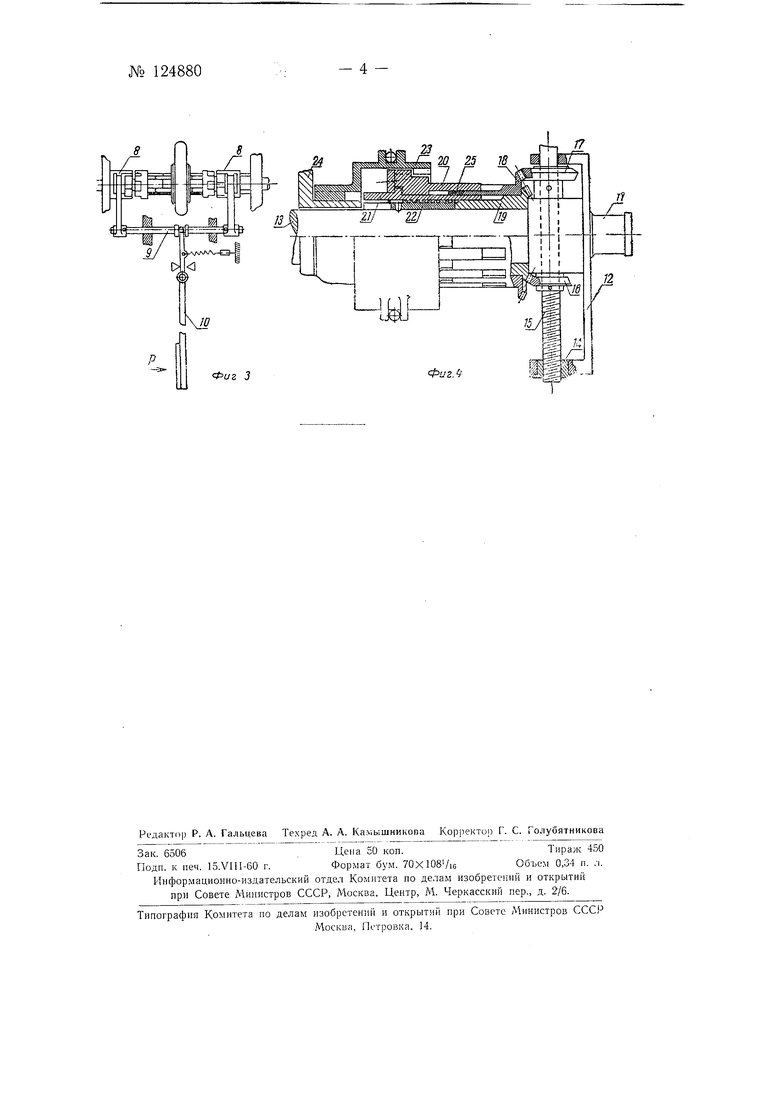
На фиг. 1 и 2 показан предложенный механизм в двух проекциях с частичными разрезами; на фиг. 3 - примерная схема автоматического управления механизмом; йа фиг. 4 - вариант предложенного механизма.
Эксцентрик / установлен на валу 2 подвижно в радиальном направлении. В эксцентрике жестко закреплен винт 3, а гайка 4 с коническим зубчатым венцом поворотно установлена на винте. Два конических колеса 5, находящихся в зацеплении с коническим венцом гайки 4, смонтированы на валу поворотно и соединены постоянно с гайками 6 шлицами. Гайки 6 имеют резьбы разного направления и взаимодействуют с резьбами 7 на валу. Две втулки 8, жестко соединенные между собой
К. И. Безик
№ 124880- 2 тягой 9, установлены на неподвижном корпусе W п могут перемещаться только вдоль оси.вала без враидення. Расстояние между втулками 8 выбирается с таким расчетом, чтобы в зацеплении с гайкой 6 лгогла находиться одновременно только одна втулка. Поскольку втулка 8 не имеет возможности поворачиваться около оси, то при зацеплении ее с гайкой 6, последняя тормозится и тормозит колесо 5, вследствие чего конический зубчатый венец гайки 4 обкатывается по колесу, и гайка, врандаясь, перемещает вннт 3, увлекающий за собой эксцентрик J, т. е. происходит изменение радиуса кривои1ипа. Каждая резьба 7 должна иметь такоз направление, чтобы при неподвижной гайке 6 и вращающемся валу 2 гайка 6 свинчивалась с резьбы на валу и выходила из зацепления со втулкой 8. Так как ход гайки 4 (т. е. величина изменения радиуса кривошипа) кинематически жестко связан с ходом гайки 6 при евинчивапии, а величина последнего определяется величиной перекрытия кулачков на гайке 6 и втулке 8, то, следовательно, величина изменения радиуса KpHBoujHna определяется положением втулки 8 и тяги 9. В нриведенном на фиг. 3 примере автоматического управления механизмом величина раднуса кривошипа является функцией силы Р, действующей на конец подпружиненного рычага 10.
На фиг. 4 показан вариант предложенного механизма, выполненный применительно к валу с кривошипом, расположенным на его конце. Кривошип // расположен на направляющей 12, установленной подвижно в радиальном направлении на валу 13 и несущей гайку М, взаимодействующую с винтом 15, поворотно установленным на валу и несущи.м два конических колеса 16, 17, находящихся в зацеплении е колесами 18, 19. Колесо 18 щлицами соединено со втулкой 20, поворотно соединенной с гайкой 21. Колесо 19 шлицами соединено с гайкой .2, которая резьбой сопрягается с винтом 22, жестко закрепленным на валу 13. Втулка 23, являющаяся управляющим органом, смонтирована подвижно в осевом направлении на корпусе 24 и может поочередно соединяться с втулкой 20 или гайкой 21, затормаживая при это.м колесо 18 или колесо 19. Остановка каждого из этих колес вызывает вращение винта 15, а следовательно, и изменение радиуса кривощипа. Кольцо 25 предохраняет колесо 18 от осевого сдвига и жестко крепится на внешней щлицевой гговерхности хвостовика колеса 19.
Предмет изобретен и я
1.Кривош1П1ный механнзм с изменяемым радиусом, состоящий из кр11вощипа (эксцентрика), смонтироваиного на валу подвнжно в радиальном направлении и соединенного с валом винтовой нарой, ось которой расположена в радиальном направлении к валу, отличающийся те.м, что, с целью обеспечения автоматического изменения радиуса кривошипа в зависимости от положения управляющего органа, гайка винтовой пары снабжена зубчатым коническим венцом, взаимодействующим с двумя коническими установленными поворотно па валу с разных сторон гайки лолосамп, ступицы которых на паружнрях поверхностях снабжены шлицами, взаимодействующими со шлицами гаек, имеющих противоположно направленную резьбу, сопряженную с резьбой вала, и снабженных пазами, взаимодействующими с выступами втулок поавижно в осевом направлении, установленных на корпусе и жестко связанных между собой стержнем, соединенным с управляющим оргапо.м.
2.Кривощииный механизм по п. 1, отличающийся те.м, что, с целью обеспечения консольного расположения кривошипа, винт винтовой пары снабжен двумя коническими колесами, взаимодействующими с двумя коническими, установленными поворотно на валу с одной стороны винта колесами, ступицы которых расположеиы внутри друг, друга, а щлицевая гайка одна, но состоит из двух частей, смонтированных поворотно относительно друг друга.
10
| название | год | авторы | номер документа |
|---|---|---|---|
| Переменная гидравлическая передача | 1933 |
|
SU38848A1 |
| КРИВОШИПНАЯ ПЕРЕМЕННАЯ ПЕРЕДАЧА | 1933 |
|
SU38878A1 |
| Устройство для регулировки закрытой высоты кривошипного пресса | 1983 |
|
SU1127782A1 |
| НАСОС ПОРШНЕВОЙ РЕГУЛИРУЕМЫЙ | 1999 |
|
RU2169860C2 |
| ЗУБЧАТАЯ МУФТА С ОТКЛЮЧЕНИЕМ ПРИВОДА | 2002 |
|
RU2230952C2 |
| Устройство поворота лопастей ветродвигателя | 1990 |
|
SU1728524A1 |
| Станок для холодного накатывания зубчатых профилей | 1988 |
|
SU1780910A1 |
| Коляска для инвалидов | 1978 |
|
SU862947A1 |
| Резцедержатель | 1974 |
|
SU513790A1 |
| Опорно-поворотное устройство грузоподъемных механизмов | 1972 |
|
SU554428A1 |
Фиг 2
