Изобретение относится к электротехнике и предназначено для использования при реализации вторичного электропитания радиоэлектронной аппаратуры в условиях жестких требований к массогабаритньм показателям.
Целью изобретения является повышение надежности управления.
На фиг. 1 представлена функциональная схема устройства, реализующего предлагаемьш способ управления выходным напряжением пьезополупровод- никового источника питания; на фиг, 2 - график, поясняющий спосбб.
Устройство содержит блок 1 регулирования, блок 2 опорного напряжения фазовый детектор 3, задающий генератор 4, формирователь 5 фазового сигнала, формирователь 6 строба и стро- бирующий узел 7 управления по ампли - туде. На схеме показаны также усилитель 8 мощности, пьезотрансформатор 9, блок 10 выпрямления и фильтрации, узел i 1 обратной связи,, входящие в состав управляемого источника. Один из входов блока 1 регулирования соединен с выходом блока 2 опорного напряжения, другой вход - с клеммами для подключения узла 11 обратной связи, а выход - с первым входом фазового детектора 3. Вход задающего генератора 4 соединен с первым выходом фазового детектора 3, один из выходов - с вторым входом фазового детектора 3, а другой выход - с клеммами для подключения первого управляющего входа усилителя 8 мощности. Вход формирователя 5 фазового сигнал соединен с клеммами для подключения вспомогательного выхода пьезотранс- форматора 9, а выход - с третьим входом фазового детектора 3, Вход формирователя 6 строба подключен к выходу блока 1 регулирования. Один из входо стробирующего узла 7 управления по амплитуде соединен с выходом формирователя 6 строба, другой вход - с вторым выходом фазового детектора 3, а выход - с клеммами для подключения второго управляющего входа усилителя 8 мощности, включенного последователно с пьезотрансформатором 9 и блоком . 10 выпрямления и фильтрации.
На входные электроды пьезотранс- форматора 9 поступает напряжение возбуждения и J с выхода регулируемого урилителя 8 мощности. Частота напря- возбуждения fg соответствует
249671
частоте, пырабгатываемой- управляемым задающим генератором 4, а амплитуда
U-g соответствует сигналу U с выхода стробируемого узла 7 управления. Выходное переменное напряжение пьезо- трансформатора 9, проходя через формирователь 5 фазового сигнала, посту-- пает в виде сигнала U на третий- вход фазового детектора 3. На второй
вход последнего подается сигнал с соответствующего выхода задающего генератора 4, а на первый вход поступает управляющий сигнал Up с выхода блока 1 регулирования. Этот же сигнал управляет работой форм1 рователя 6, ко торый, в свою очередь, вырабатьшает строб Uc, поступающий на стробирую- щий вход узла 7 управления. Блок 1 регулирования по пропорционально-интегрально-дифференциальному закону формирует управляющий сигнал Up в соответствии, с осйовным сигналом ошиб-
ки Un +(и„„ - .Uoc ). Сигнал U по25
дается на один из входов блока регулирования с,выхода блока 2
1
опорного напряжения, а сигнал Пос ,. пропорциональный выходному напряжению Ugbix выходе блока 10 выпрямления и фильтрации, с помощью узла..11 обратно
30 связи поступает на другой вход блока 1 регулирования. Фазовый детектор 3 имеет два в ькода. На первом выходе вырабатывается фазовый сигнал рассогласования Uy, поступающий на вход
35 задающего генератора 4, а на втором выходе формируется информационный фазовый сигнал ошибки U ,, управляющий работой узла 7.
Совокупность операций предлагаемого способа и работа устройства с данным способом управления заключаются в следующем. При включении устройства вькодное напряжение Ug, и соответственно сигнал UQC равны нулю. Вследствие этого блок 1 регу- лирования вырабатывает минимальный
по уровню сигнал U
Р (ин
Формирова50
тель 6 строба обладает пороговыми свойствами, т.е. формирует строб U только при превышении сигналом U некоторого порога Up,, U .В отРмин,
55
сутствии строба U. узел 7 вне зависимости от информационного фазового сигнала ошибки вырабатывает сигнал Uc, соответствующий номинальному значению U
в п чог-
Ввиду неопределенности исходного состояния рабочая точка, определяемая частотой f ,
может оказаться в любой области амплитудно-частотной характеристики (АЧХ) пьезотрансформатора 9. Однако установка границ изменения частоты задающего генератора 4 таковаi , что выходное переменное напряжение пьезотрансформатора 9 оказьшается достаточным для нормальной работы формирователя 5 фазового сигнала. Фазовый детектор 3 сравнивает по фазе .сигналы с выходов генератора 4 и формирователя 5. В соответствии с сигналом рассогласования ДЧ фазовый детектор 3 вырабатывает сигнал U, управляющий работой задающего гене- ратора 4 и вьюодящий рабочую точку пьезо рансформат.ора 9 на уровень резонансной частоты. Вследствие того, .что „ , рост напряжения УВЫХ происходит с максимальной ско- ростью. Фазовый детектор 3 построен таким образом, что при U Up сиг-. нал с выхода блока 1 регулирования не оказьшает влияния на работу частотного контура источника. Таким, об- разом, частотный контур стабилизации по цепи обратной связи оказьшается разомкнутым, ..а в работе участвует фат зовый контур, обеспечивающий фазочас- TqTHoe управление. РЬст выходного Напряжения 11;, источника .происходит до тех пор, пока оно неiстановится сравнимым с заданным значением (и.. х. oh ) Фиксируя этот моме.нт, блок 1 регулирования начинает изменять свре выходное напряжение Up . С момента, когда Up и,р (Uyp - сигнал U, , со- ответствзтощий положению рабочей точки на резонансной частоте пьезотрансфор- матора 9), фазрвый детектор 3, постоянно определяя лч и вырабатьгеая информационный сигнал фазовой ошибки , начинает формировать Uy в соответствии с сигналом Up. При зтом обеспечивается частотное управление с замкнутым контуром по цепи обратной связи и рабочая точка смещается вдоль рабочего (правого) склона АЧХ в сторо ну компенсации сигнала ошибки.
В известных источниках питания реальная нагрузка всегда ниже номинального значения, т.е. основное время пьезотрансформатор.нагружен током, равным, приблизительно половине номинального значения. Поэтому наиболее вероятным является положение рабочей точки на середине склона АЧХ (при .фиксированной величине U ). В этом
режиме КПД источника в целом являетс пониженным. Кроме того, несмотря на недогрузку пьезотрансформатора по мощности, его надежностные показател не улучшаются в связи с подачей на вход максимального значения напряжения возбуждения Ug. Недостатком является также схемотехническая избыточность, связанная с тем, что в процессе отработки слабых внешних возмзпцени фазовый детектор не участвует в работе. В предлагаемом техническом решении эти недостатки устраняются введением нелинейного многомерного взаимосвязанного управления по всем трем параметрам напряжения возбуждения U (амплитуде, частоте и фазе). Для этого в режиме отработки слабых возмущений осуществляется амплитудное управление напряжением Ug, которое включается в работу лишь при наличии стробирующего сигнала U.
В фазовом детекторе 3, как уже отмечалось, предусмотрен дополнительный выход, на котором вырабатывается информационный фазовый сигнал ошибки в виде последовательности импульсов , длительность которых и пропорциональна фазовому рассогласованию В соответствии с сигналом U,po при наличии строба Up (когда Up Up ). узел 7 управления формирует сигнал и, поступающий на усилитель 8 мощности и изменяющий амплитуду Ug напряжения возбуждения пьезотрансформатора 9 по пропорционально-интег - рально-дифференциальному закону. Таким образом, узел 7 управления является звеном переменной структуры, изменяющим свою структуру в зависимости от сигнала U. : в отсутствие U (UP Up, ), узел 7 через усилитель 8 обеспечивает Ug jiUe MftKc , а при наличии и (Up Up ) структура узла 7 соответствует пропорционально- интегрально-дифференциальному регулятору. Параметры настройки блока 1 регулирования таковы, что узел 7 по отношению .к блоку 1 обеспечивает менее форсированное изменение U, по с равBhn
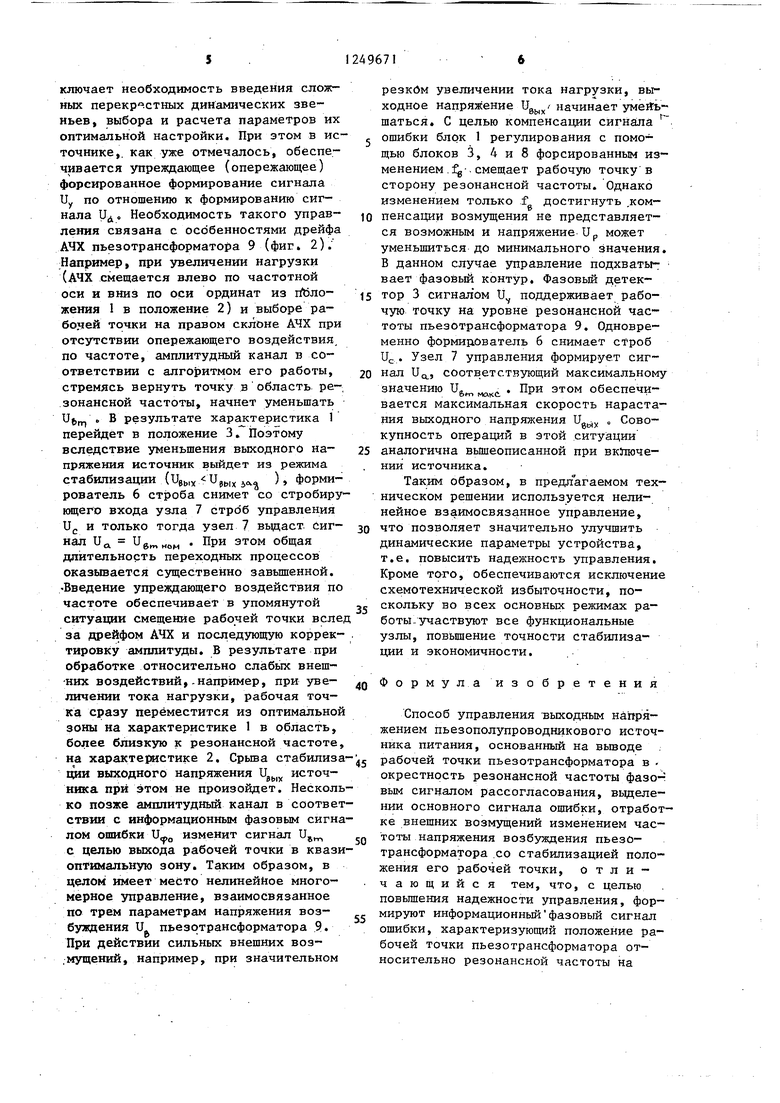
нению с изменением fgпо частотному каналу при их взаимосвязанной работе. При этом в целом осуществляется многомерное нелинейное взаимосвязанное управление и стабилизация U, в ква- зиоптимальном режиме. Нелинейная взаимосвязь амплитудного управления в зависимости от сигналов U, , U неключает необходимость введения сложных перекрестных динаю1ческих звеньев, выбора и расчета параметров их оптимальной настройки. При этом в ис- точнике,, как уже отмечалось, обеспечивается упреждающее (опережающее) форсированное формирование сигнала Uy по отношению к формированию сигнала Цд. Необходимость такого управ- ления связана с особенностями дрейфа АЧХ пьезотрансформатора 9 (фиг, 2). Например, при увеличении нагрузки (АЧХ смещается влево по частотной оси и вниз по оси ординат из гЛэло- жения 1 в положение 2) и выборе ра- бо.чей точки на правом склоне АЧХ при отсутствии опережающего воздействия, по частоте, амплитудный канал в соответствии с алгоритмом его работы, стремясь вернуть точку в область ре-- зонансной частоты, начнет уменьшать U{,rf, . В результате характеристика 1 перейдет в положение 3, Поэтому вследствие уменьшения выходного на- пряжения источник выйдет из режима стабилизации (Ujbix jo, ), формирователь 6 строба снимет со стробиру- ющего входа узла 7 строб управления Up и только тогда узел 7 вьщаст. сиг- нал и . При этом общая длительность переходных процессов оказывается существенно завьш1енной. Введение упреждающего воздействия по частоте обеспечивает в упомянутой ситуации смещение рабочей точки всле за дрейфом АЧХ и последующую корректировку амплитуды. В результате при обработке относительно слабых внеш- них воздействий,-например, при уве- личении тока нагрузки, рабочая точка сразу переместится из оптимальной зоны на характеристике 1 в область, более близкую к резонансной частоте, на характеристике 2, Срьша стабилиза 1ШИ выходного напряжения и,, источника при этом не произойдет. Несколько позже амплитудный канал в соответствии с информационным фазовым сигналом ошибки изменит сигнал U с целью выхода рабочей точки в квазиоптимальную зону. Таким образом, в целом имеет место нелинеййое многомерное управление, взаимосвязанное по трем параметрам напряжения воз
буждения и пьезотрансформатора 9. При действии сильных внешних воз- .мущений, например, при значительном
JQ 5 0 5 о Q r
5
резким увеличении тока нагрузки, выходное напряжение начинает умейь- шаться. С целью компенсации сигнала ошибки блок 1 регулирования с помощью блоков 3, 4 и 8 форсированным изменением .. смещает рабочую точку в сторону резонансной частоты. Однако изменением только f достигнуть .компенсации возмущения не представляется возможным и напряжение Up может уменьшиться до минимального значения. В данном случае управление подхваты- вает фазовый контур, Фазовьй детектор 3 сигнал ом и поддерживает рабочую точку на уровне резонансной частоты пьезотрансформатора 9. Одновременно формицователь 6 снимает строб Uc. Узел 7 управления формирует сигнал UCL, соответствзтощий максимальному значению U с, Р этом обеспечивается максимальная скорость нарастания выходного напряжения Ug,, . Совокупность операций в этой ситуации аналогична вьшеописанной при вк}1юче- нии источника.
Таким образом, в предл агаемом техническом решении используется нелинейное взаимосвязанное управление, что позволяет значительно улучшить динамические параметры устройства, т.е. повысить надежность управления. Кроме того, обеспечиваются исключение схемотехнической избыточности, поскольку во всех основных режимах работы- участвуют все функциональные узлы, повышение точности стабилизации и экономичности.
Формула изобретения
Способ управления выходным напряжением пьезополупроводникового источника питания, основанный на вьюоде рабочей точки пьезотрансформатора в окрестность резонансной частоты фазо-г вым сигналом рассогласования, вьщеле- НИИ основного сигнала ошибки, отработке внешних возмущений изменением частоты напряжения возбуждения пьезотрансформатора .со стабилизацией положения его рабочей точки, отличающийся тем, что, с целью повьшения надежности управления, формируют информационный фазовый сигнал ошибки, характеризующий положение рабочей точки пьезотрансформатора относительно резонансной частоты на
рабочем склоне амплитудно-частотной характеристики, и сигнал управления амплитудой напряжения возбуждения пьезотрансформатора в нелинейной функции основного сигнала ошибки и информационного фазового сигнала ошиб ки, в процессе вывода рабочей точки пьезотрансформатора на рабочий склон эмплитудно-частотной характеристики сигнал управления амплитудой напряжения возбзгасдения устанавливают соответ ствующим максимальному напряжению
возбуждения, при отработке внешних возмущений сигнал управления частотой напряжения возбуждения устанавливают
по основному сигналу ошибки, стабилизацию положения рабочей точки пьезотрансформатора осуществляют сигналом управления амплитудой напряжения возбуждения в соответствии с пропорционально-интегрально-дифференциальнымзаконом, причем обеспечивают форси- рованное опережающее изменение частоты по отношению к изменению амплитуды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляющее устройство стабилизированного пъезополупроводникового источника питания | 1984 |
|
SU1241373A1 |
| Способ управления преобразователемНА бАзЕ пьЕзОэлЕКТРичЕСКОгО ТРАНСфОРМА-TOPA | 1979 |
|
SU799052A1 |
| Стабилизатор постоянного напряжения | 1979 |
|
SU800974A1 |
| Способ управления выходным напряжением в пьезополупроводниковом преобразователе | 1977 |
|
SU720575A1 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
| Способ частотно-амплитудного управления напряжением в пьезополупроводниковых преобразователях | 1976 |
|
SU600640A1 |
| Стабилизированная система электропитанияНА бАзЕ пьЕзОТРАНСфОРМАТОРА | 1979 |
|
SU851687A1 |
| Пьезополупроводниковый преобразователь с регулировкой выходного напряжения | 1988 |
|
SU1606968A1 |
| Устройство для определения собственных параметров резонирующих тел | 1985 |
|
SU1319823A1 |
| Устройство для измерения коэффициента нелинейности пилообразного напряжения | 1981 |
|
SU978077A1 |
Изобретение относится к электротехнике и может быть использовано в частности, для питания радиоэлектронной аппаратуры в условиях жестких требований к массогабаритным показателям. Цель изобретения - повьшение надежности управления. Узел 7 управления изменяет свою структуру в зависимости от стробирующего сигнала. Обеспечивается опережающее форсированное формирование фазового сигнала рассогласования по отношению к выход-i ному сигналу узла 7. Это необходимо из-за особенностей дрейфа амплитудно- частотной характеристики пьезотранс- форматора 9. Имеет место нелинейное многомерное управление, взаимосвязанное по трем параметрам напряжения возбуждения пьезотрансформатора 9. : При сильных возмущениях-В управлении участвует фазовый детектор 3, который выходным сигналом поддерживает рабочую точку на уровне резонансной частоты пьезотрансформатора 9. Обеспечивается максимальная скорость восстановления .выходного напряжения. 2: ЙЛ. i (Л с to 4:3 со О) фиг.1
Sbix
§ЫЛ. 30ff.
Редактор В.Иванова Заказ 4337/57
Составитель Л. Морозов
Техред Л.Олейник Коррект.ор О. Луговая
Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
.по делам изобретений и открытий М3035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
(Duz.Z
| Способ управления преобразователемНА бАзЕ пьЕзОэлЕКТРичЕСКОгО ТРАНСфОРМА-TOPA | 1979 |
|
SU799052A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стабилизированная система электропитанияНА бАзЕ пьЕзОТРАНСфОРМАТОРА | 1979 |
|
SU851687A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
