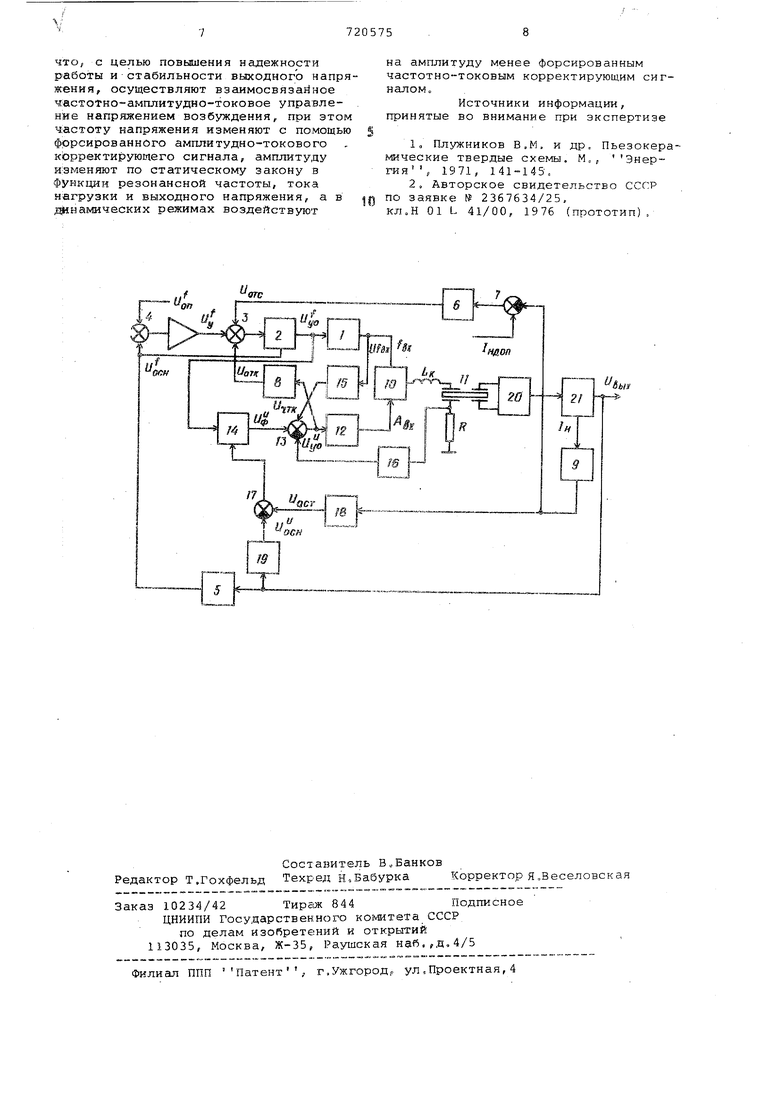
Пьеэополупроводниковый преобразов гель стабилизированного напряжения содержит регулятор частоты 1 (управляеьфай задающий генератор) , частотный формирователь-ограничитель 2 диапазона изменения частоты, схемы сравнения 3 и 4, Формирователь-ограничитель oi ecпечивает требуемые диапазоны из1иенения частоты (ограничение Осуществляется, например, посредством стабилитронов) и устраняет инверсию управле ния из-за возможности перехода рабочей точки на противоположный склон . пьезотрансформатора (ПТ) . На схему сравнения 4 поступает опорное напряжение, соответствующее выбранной рабочей точке на правом склоне АЧХ, и напряжение обратной :связи по выходному напряжению нагруз ;ки, снимаемое с датчика напряжения 5. ;Оно несет в себе информацию об изменении частоты напряжения на выходе ПТ при действии разнообразных возмущений-изменениях тока нагру ки, воздействии электромагнитных полейf механических воздействий, изменении температуры и др. На схему сравнения 3 поступает сигнал токовой отсечки с порогового формирователя 6 от cxeivbj сравнения 7 и амплитуднотоковый корректирующий сигнал с фор;мирователя 8, На схему сравнения 7 поступают сигналы допустимого тока нагрузки и текущего значения тока нагрузки от датчика тока 9. Сигнал с выхода схемы сравнения 7 поступает на формирователь б и схему сраннения 3 при превышении тока нагрузки допустимого значения. Регулятор ч:астот 1 управляет по частоте режимом работ выходного усилителя мощности 10,нагр женного через компенсирующую ик.дуктивность на электроды возбуждения ПТ 11. Изменение амплитуды входного напряжения возбуждения ПТ осуществля ется с помощью амплитудно-токового регулятора 12, На входе регулятора 12 установлены схема сравнения 13 и функциональный преобразователь 14 На схему сравнения 13 поступают частотно-токовый корректирующий сигнал с формирователя 15 и сигнал отрицательной обратной связи по входно му току ПТ с датчика входного тока 16. На один вход функционального пре обраэователя 14 поступает сигнал с выхода схемы сравнения 17, на которую в свою очередь поступают сигналы положительной обратной связи по току нагрузки с инвертора 18 и отрицательной обратной связи по выходному напряжению нагрузки с датчика напряжения 19, На другой вход Лункциональ но1Х преобразователя 14 поступает сигнал с выхода частотного фор(шрова теля-О1Тэаничителя 2, Функциональный преобразователь обеспечивает требуемое амплитудное соотношение, в котором в качестве исходного параметра преобразования принята резонансная частота ПТ. Закон преобразования определяется типом ПТ, его конструктивными данными и материалом, из которогО он выполнен. Пьезотрансформа-тор 11 через выпря14итель 20 (или схему умножения) соединен снагрузкой 21 (на входе нагрузки может быть установлен фильтр) Данный способ управления напряжением реализуется следующим образом. При действии сильных возмущений у ПТ происходит дрэйф его АЧХ, что сопровождается уменыиением резонансной частоты fp. и уменьшением напряжения Ug,,,,), на резонансной частоте. При этом АЧХ ПТ характеризуются при разных токах нагрузки Эц переменной эквивалентной добротности Оэие.., причем QjKs. падает по мере увеличения 3 и АЧХ ПТ из острорезонансных становятся более широкополосными. Изменение QJKB. происходит в несколько раз (порядка 4-5) при изменении тока нагрузки примерно от холостого хода до короткого замыкания. При требовании высокой точности стабилизации выходного напряжения при сильных изменениях тока нагрузки JH. система управления пьезополупроводникового преобразователя должна в определенных пределах осуществлять автоматическое изменение частоты на входе fg,,,так, чтобы при любом к fu-if. ПТ и изменять Ag,i (|р Э„, -йьч) так, чтобы обеспечивалось выполнение ХСЛОВИ я п-.аГ 1- где и соответствует положению рабочей точки на правом склоне АЧХ ПТ в согласованном режиме его работы ( 0,1-0,25). Задача стабилизации напряжения сводится к реализации в системе управления стабильного отношения 1р constили J const { ) « 0,9-0,75)„ ,Црей(Ь АЧХ ПТ осуществляется влево и вправо от согласованного режима работы ПТ при сильных изменениях тока нагрузки: при увеличении нагрузки дрейф АЧХ происходит влево, при уменьшении нагрузки - вправо. Изменения амплитуды ПТ вы.зывают также некоторые изменения {р. Следовательно,система управления должна также отслеживать и эти изменения fp соответствующим изменением { . Таким образом, при увеличении тока нагрузки система управления должна увеличивать Ag по сравнению с Agj., а при уменьшении Э -действовать обратным образом, т.е. уменьшать А. При увеличении тока нагрузки Jy., в ПТ одновременно происходит уменьшение мощности рассеивания. Значения допустимых napaN ETpOB ПТ определя:ются допустимыми значениями напряженности по перегреву и по разрушению ПТ, которые зависят от ц . Сигнал с выхода схемы 3 управляет работой генератора 1, компенсируя незначителные отклонения (Je,f. по АЧХ ПТ, связа ные с дрейфом рабочей точки, обусловленные воздействием слабых возмущений. Аналогично, слабые возмущения компенсируются регулятором 12 посредством отработки сигнала рассог лассования на его входе. При действи сильных возмущений стабилизацию выходного напряжения можно с достатоно высокой статической и динамической точностью осуществить введением частотно- и амллитудно- корректирующих сигналов, перекрестно воздействующих соответственно на каналы регулирования амплитуды и частоты. Эти сигналы,обеспечивают компенсацию отклонения выходного напряжения от заданного.. Использование дополнительного регулирования по току нагрузки, выходному току и взаимосвязанное частотно-амплитудно-токовое управленИе с воздействием амплитудно-токовы корректирующим сигналом на форсированное статическое и динамическое изменение частоты , г изменение амплитуды в функции f (fp, по статическому закону и воздействие на нее в динамических режимах менее форсированным частотно-токовым корректирующим сигналом позволяет, с одной стороны, обеспечить высокую статическую и динамическую точность стабилизации выходного напряжения при сильных возмущениях, а с другой стороны, увеличить надежность работы преобразователя за счет исключени предельно-допустимых режимов работы ПТ При этом выбор рабочей точки осуществляют на правом склоне АЧХ ПТ и задают режим работы частотного формирователя-ограничителя 2 так, чтобы он обеспечивал ограниченные пределы изменения ,, стабилизацию рабочей точки на правом склоне АЧХ ПТ выбором соотношения {е. различных значениях Оц. Информацию, на основе анализа которой формирователь-ограничитель 2 работает указанным выше образом, он получает с выхода схемы сравнения 3 и за счет воздействия на него непосредственно сигнала обратной связи по выходному напряжению. Нижний предел частоты 1 управляемого задающего генератора 1 ограничен и примерно соответствует
HQUQ верхний предел частоты примерно соответствует 3„ , где t-p имеет максимальное значение. Выбор и фиксация рабочей точки на правом склоне АЧХ ПТ является оптимальной с точки зрения организации управлени .напряжением стабилизированного преобразователя, так как при этом существенно уменьшается диапазон перенастройки ь,, при сильных возмущениях со стороны нагрузки по сравнению с выбором рабочей точки на левом склоне АЧХ ПТ и, кроме того, возникает однозначность управления как при дрейфе рабочей точк.и по склону АЧХ ПТ, так и при дрейфе АЧХ ПТ. Ограничение тока нагрузки допустимым его значением ц опосуществляется посредством задержанной (пороговым формирователем 6) отрицательной обратной связи, действующей также на схему 3. При этом при
задержанная обратная связь начинает работать и снимает действие амплитудно-токового корректирующего сигнала. Изменение амплитуды А обеспечивается посредством функционального преобразователя 14 действием сигнала отрицательной обратной связи по входному току ПТ и действием частотно-токового корректирующего сигнала . При этом функциональный преобразователь 14 осуществляет управление Ag. в функции fe.)..,, Воздействие осуществляет Динамическую коррекцию амплитуды Ац. в функции частоты fp ПТ при сильных возмущениях. При этом сигнал Ишк обеспечивает менее форсированное изменение амплитуды АО,. пО сравнению с более форсированным изменением входной частоты ПТ, что позволяет уменьшить диапазон изменения f так как определяю1цим параметром для
и.
преобразователя является в первую очередь изменение резонансной частоты {р. ПТ. Формирование требуемого сигнала Учтк осуществляет динамический преобразователь 15 соответствующим динамическим воздействием на входной сигнал.
Использование данного способа взаимосвязанного амплитудно-частотнотокового управления напряжением в пьезополупроводниковых преобразователях обеспечивает по сравнению с существующими способами высокую статическую и динамическую точность стабилизации выходного напряжения при сильных возмущениях, надежную работу и нормальное функционирование пьезотрансформатора; огг аничение режимов работы пьезотрансформатора предельно допустимыми при изменении нагрузки в широких пределах, устранение инверсии управления,хорошую помехозащищенность.
Формьла изобретения
Способ управления выходным напряжением в пьезополупроводниковом преобразователе, основанный на воздействии на частоту и амплитуду напряжения возбуждения частотнокорректирующих и амплитудно корректирующих сигналов, отличающийся тем.
4TOf с целью повьшения надежности работы и стабильности выходного напряжения, осуществляют взаимосвязайное частотно-амплитудно-токовое управление напряжением возбуждения, при этом Ч:астоту напряжения изменяют с помощью форсированного амплитудно-токового корректирующего сигнала, амплитуду изменяют по статическому закону в функции резонансной частоты, тока нагрузки и выходного напряжения, а в данамических режимах воздействуют
на амплитуду менее форсированным частотно-токовым корректирующим сигналом.
Источники информации, принятые во внимание при экспертизе
1а Плужников В.М, и др. Пьезокерамические твердые схемы. М„, Энергия, 1971, 141-145
2, Авторское свидетельство СССР по заявке № 2367634/25.
кЛоН 01 L 41/00, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ частотно-амплитудного управления напряжением в пьезополупроводниковых преобразователях | 1976 |
|
SU600640A1 |
| Способ управления выходным напряжением пьезополупроводникового источника питания | 1985 |
|
SU1249671A1 |
| Способ управления выходным напряжением в пьезополупроводниковом преобразователе | 1977 |
|
SU646392A1 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
| Пьезополупроводниковый стабилизатор напряжения | 1984 |
|
SU1241369A1 |
| Управляющее устройство стабилизированного пъезополупроводникового источника питания | 1984 |
|
SU1241373A1 |
| Стабилизированная система электропитанияНА бАзЕ пьЕзОТРАНСфОРМАТОРА | 1979 |
|
SU851687A1 |
| Стабилизатор постоянного напряжения | 1979 |
|
SU800974A1 |
| Способ управления преобразователемНА бАзЕ пьЕзОэлЕКТРичЕСКОгО ТРАНСфОРМА-TOPA | 1979 |
|
SU799052A1 |
| Пьезополупроводниковый стабилизатор постоянного напряжения | 1980 |
|
SU926636A1 |
