Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения периода технического обслуживания изделия | 1988 |
|
SU1536415A1 |
| Устройство для определения оптимального периода контроля и технического обслуживания системы | 1991 |
|
SU1837338A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ СИСТЕМЫ | 2006 |
|
RU2310913C1 |
| Устройство для определения оптимального периода технического обслуживания системы | 1981 |
|
SU976461A1 |
| Устройство для определения оптимального периода контроля и технического обслуживания изделия | 1988 |
|
SU1587555A2 |
| Устройство для определения ресурса системы | 1985 |
|
SU1256062A1 |
| Устройство для определения оптимального периода технического обслуживания системы | 1987 |
|
SU1437888A1 |
| Устройство для определения оптимального периода технического обслуживания изделия | 1987 |
|
SU1509964A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТРЕБУЕМОГО ВРЕМЕНИ ВОССТАНОВЛЕНИЯ ГОТОВНОСТИ ИЗДЕЛИЯ К ПРИМЕНЕНИЮ | 2008 |
|
RU2393542C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДОПУСТИМОГО ВРЕМЕНИ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ СИСТЕМЫ | 2008 |
|
RU2380755C1 |
Изобретение относится к устройствам для контроля и может быть использовано в научных исследованиях и технике, где требуется находить оптимальные периоды контроля и технического обслуживания, доставляющие максимум коэффициента готовности систем, время полезного функционирования системы на заданном ограниченном ресурсе и коэффициент готовности системы. Цель - повышение информативности устройства. Устройство содержит анализатор 1, элемент задержки 2, элемент сравнения 3, датчик 4 времени, блок 5 умножения, первый 6, второй 7 и третий 8 ключи, m вычислителей коэффициента готовности подсистем 9i9m, каждый из которых содержит сумматор 10, блок 11 умножения, функциональный преобразователь 12, блок 13 деления и интегратор 14. 1 з. п. ф-лы, 1 ил.
Изобретение относится к устройствам контроля и может быть использовано в научных исследованиях и технике, где требуется находить оптимальные периоды контроля и технического обслуживания (ТО), доставляющие максимум коэффициента готовности систем, время полезного функцио- нирования системы на заданном ограниченном ресурсе и коэффициент готовности системы.
Целью изобретения является повышение информативности устройства за счет определения времени полезного функционирования системы на заданном ограниченном ресурсе, коэффициента готовности системы, а также выполнения операции сравнения величин коэффициентов готовности подсистем одновременно (параллельно).
Многие средства автоматизированного управления используются в дежурном режиме. Перевод этих средств в режим целевого функционирования производится в общем случае в случайный момент времени, наличие отказа на момент включения приводит к невыполнению целевой задачи. Для поддержания таких средств автоматизированного управления в исправном состоянии они подвергаются периодически через время ттехническому обслуживанию, заключающемуся в контроле состояния и ремонте при обнаружении отказа. Важной характеристикой системы, работающей в дежурном режиме, является коэффициент готовности, который определяется следующим образом:
О VI Ю
сл
ю
г - Тф (г-f.
где Тф - среднее время полезного функционирования системы, т. е. время, в течение которого она выполняет целевую задачу либо готова выполнять целевую задачу;
Т - заданное время функционирования (ограниченный ресурс), в течение которого система полезно функционирует или находится в состоянии отказа или технического обслуживания.
Если не проводить технического обслуживания системы, то время, в течение которого оно может полезно функционировать, соответствует времени полезного функционирования системы до первого отказа в любой из ее подсистем. Повышение числа сеансов контроля сложной системы увеличивает время ее полезного функционирования за счет устранения отказов, но при этом повышается расход ресурса на техническое обслуживание, что сокращает ресурс на полезное функционирование. Поэтому существует некоторый целесообразный период между сеансами контроля и технического обслуживания, доставляющий наибольшее время полезного функционирования сложной системы, а значит, и наибольшее значение Кг.
Поскольку реальная система в общем случае состоит из множества разнонадеж- ных подсистем, то для каждой подсистемы будет свой оптимальный период контроля и технического обслуживания, доставляющий максимум Кг этой подсистемы. В то же вре- кя, в практике эксплуатации многих сложных систем оказывается целесообразным проводить контроль и техническое обслуживание системы одновременно. Возникает задача - найти тот рациональный период контроля и технического обслуживания, который обеспечил бы наибольший Кг всей системы.
Пусть в составе сложной системы находится m подсистем, 0 Tjn). На каждый сеанс контроля и технического обслуживания jTOflcncTeM в среднем расходуется время }/),а на восстановление подсистемы при возникновении в ней отказа - в среднем время Gj.
Контроль и техническое обслуживание всех подсистем осуществляются с одинаковой периодичностью через время г.Отказы, возникающие на этом периоде, обнаруживаются только в результате контроля. Считают, что в случае отказа любой из подсистем сложная система не может выполнять целевого назначения. Если известны также время функционирования подсистем Tj, причем Tt Т2 ... Т и вероятность безотказной работы Pj(t) каждой подсистемы (j 1, m),
тогда уравнение баланса на ресурсе Т для j-й подсистемы можно записать в виде
0
5
0
5
5
1
0
NJ | Гф + roj -f К + Ц 1 - Pj (r)j.
где NJ - число сеансов контроля и ТО J-й подсистемы на ресурсе Т; .
ТФ- среднее время полезного функционирования j-й подсистемы на периоде т
Pj(t)dt;
TOJ- среднее время нахождения j-й подсистемы в состоянии отказа на периоде г,
Го - Т - Гф .
Среднее время полезного функционирования J-й подсистемы за время Т будет Тф| NJ гф|. Тогда коэффициент готовности любой из подсистем контролируемой системы определяется следующим образом:
К, .
г Т Toj+foj+u+ H -P(t)J
Задача нахождения общего для всех подсистем периода контроля и технического обслуживания т, доставляющего наибольшее значение коэффициента готовности сложной системы, состоит в том,
чтобы найти такой период г, при котором
КГ (Г)
rxm.(r)3
При этом, если Тс - заданное время активного существования системы, то среднее время полезного функционирования системы, если ее обслуживать периодом г будет
Тф Тс3М г),
а коэффициент готовности системы будет
Кг Кг( Т ). Данная математическая модель
может быть реализована аппаратурно.
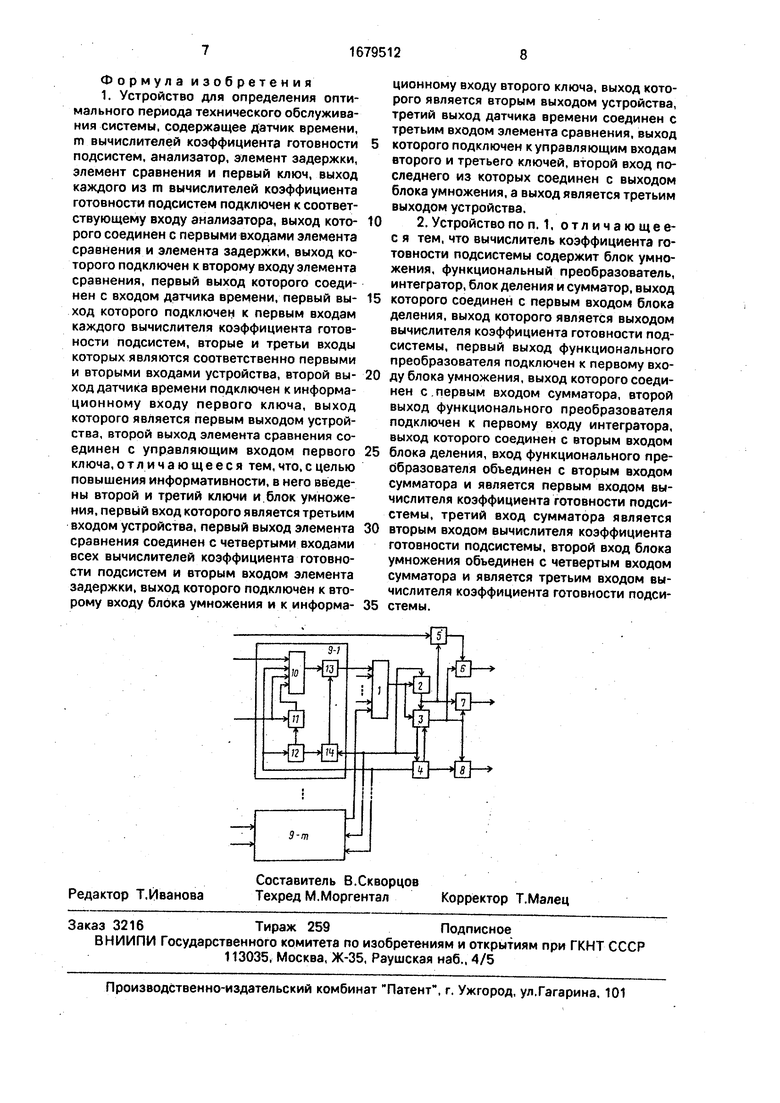
На чертеже представлена структурная схема устройства.
Устройство содержит анализатор (выбора минимальной из m переменных) 1, элемент задержки 2, элемент сравнения 3, датчик 4 времени, блок 5 умножения, первый 6, второй 7 и третий 8 ключи, m вычислителей коэффициентов готовности подсистем 9-1, ..., 9-пь каждый из которых
содержит сумматор 10, блок 11 умножения, функциональный преобразователь 12, блок 13 деления и интегратор 14.
Устройство работает следующим образом.
Датчик времени 4 с шагом Аг задает в порядке нарастания последовательность возможных значений т периода контроля и технического обслуживания системы П Г| - 1 + Аг,
l 1.2,3, ... r0 0
Сигнал, соответствующий т с первого выхода датчика времени А подается на четвертые входы вычислителей коэффициентов готовности подсистем. В каждом таком вычислителе выполняется вычисление коэффициента готовности Krij, соответствующего J-й подсистеме при каждом очередном значении т. Процесс вычисления коэффициента готовности подсистемы рассматривают на примере j-ro вычислителя. Сигнал п с четвертого входа вычислителя коэффициента готовности j-й подсистемы подается на второй вход сумматора 10 и на вход функционального преобразователя 12. В функциональном преобразователе 12 формируется функция вероятности безотказной работы j-й подсистемы Pij(t) на периоде 0, т и с первого выхода поступает на вход интегратора 14. С второго выхода функционального преобразователя 12 на второй вход блока умножения 11 поступает значение вероятности отказа j-й подсистемы в момент вре- мени Г| Pj(Ti). С выхода интегратора 14 на первый вход блока деления 13 поступает значение среднего времени полезного функционирования j-й подсистемы на периоде
Ц Фи Д ри 0) dt На первый вход блока умножения 11 и на третий вход сум- матора 10 с второго входа вычислителя коэффициента готовности j-й подсистему поступает значение параметра 6} , а с первого входа вычислителя на первый вход сумматора 10 - значение пара- метра у.
Результат перемножения О) Pj (ri) с выхода блока умножения 11 поступает на четвертый вход сумматора 10. Результат суммирования
TI+XJ (ri)ri+Xj+6} i -PJ(TJ) с выхода сумматора 10 поступает на второй вход блока деления 13, в котором происходит вычисление коэффициента готовности J-й подсистемы
Krij
УФЦ
ч+Я+фП-РТта
Значения коэффициентов готовности подсистем с выходов блока деления 13 каждого вычислителя коэффициента готовности подсистемы поступают на соответствующие входы анализатора 1 выбора минимальной из переменных. На выходе схемы выбора минимальной из m переменных будет значение Kri rnin Krij, которое поступает на первый вход элемента сравнения 3 и через
0 5
5
0
0
5
0
5
элемент задержки 2 - на второй вход элемента сравнения 3. На выходе элемента задержки 2 будет сигнал КГ|-1. задержанный на один цикл работы устройства. По истечении времени т после выдачи датчиком времени 4 сигнала амплитудой т с управляющего выхода датчика времени 4 на управляющий вход элемента сравнения 3 поступает управляющий импульсивный сигнал. По этому сигналу осуществляется сравнение сигналов на двух входах элемента сравнения 3, т. е. сравнение осуществляется в момент окончания вычисления значения коэффициента готовности каждой подсистемы. Если КГ| КК|-1, то с первого выхода элемента сравнения 3 на управляющий вход датчика времени 4. на управляющий вход элемента задержки 2 и через третий вход каждого вычислителя коэффициента готовности подсистемы на управляющий вход интегратора 14 поступает управляющий сигнал. По фронту управляющего сигнала интегратор 14 приводится в исходное нулевое состояние, в элементе задержки 2 сигнал на входе переписывается на выход. По спаду управляющего сигнала с первого выхода элемента сравнения 3 датчик времени 4 формирует очередное значение периода контроля и ТО т +1 и весь цикл вычислений повторяется. Если окажется, что Kri Kri-i, то с второго выхода элемента сравнения 3 на управляющий вход первого 6, второго 7 и третьего 8 ключей поступает управляющий сигнал. С второго выхода датчика времени 4 на информационный вход третьего ключа 8, а с него на третий выход устройства поступает значение оптимального периода контроля и
ТО т Г - ч . С выхода элемента задержки на первый вход блока умножения 5 и на информационный вход второго ключа поступает значение коэффициента готовности системы Kr Kri-i, если ее обслуживать оптимальным периодом контроля и ТО
ji.
т . Это значение с выхода второго ключа 7 поступает на второй выход устройства. На второй вход блока умножения 5 с входа устройства поступает значение заданного времени активного существования системы Тс3. Результат перемножения, соответствующий среднему времени полезного функционирования системы, с выхода Тф Тс3 Кг блока умножения 5 через первый ключ б поступает на первый выход устройства. В результате на первом выходе устройства будет значение среднего времени полезного функционирования системы Тф , если ее обслуживать оптимальным периодом контроля и ТО т.
Формула изобретения 1. Устройство для определения оптимального периода технического обслуживания системы, содержащее датчик времени, m вычислителей коэффициента готовности подсистем, анализатор, элемент задержки, элемент сравнения и первый ключ, выход каждого из m вычислителей коэффициента готовности подсистем подключен к соответствующему входу анализатора, выход кото- рого соединен с первыми входами элемента сравнения и элемента задержки, выход которого подключен к второму входу элемента сравнения, первый выход которого соединен с входом датчика времени, первый вы- ход которого подключен к первым входам каждого вычислителя коэффициента готовности подсистем, вторые и третьи входы которых являются соответственно первыми и вторыми входами устройства, второй вы- ход датчика времени подключен к информационному входу первого ключа, выход которого является первым выходом устройства, второй выход элемента сравнения соединен с управляющим входом первого ключа, отличающееся тем, что, с целью повышения информативности, в него введены второй и третий ключи и блок умножения, первый вход которого является третьим входом устройства, первый выход элемента сравнения соединен с четвертыми входами всех вычислителей коэффициента готовности подсистем и вторым входом элемента задержки, выход которого подключен к второму входу блока умножения и к информа-
ционному входу второго ключа, выход которого является вторым выходом устройства, третий выход датчика времени соединен с третьим входом элемента сравнения, выход которого подключен к управляющим входам второго и третьего ключей, второй вход последнего из которых соединен с выходом блока умножения, а выход является третьим выходом устройства.
| Устройство для определения оптимального периода технического обслуживания системы | 1987 |
|
SU1437888A1 |
| кл | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
