Изобретение относится к машиностроению и может быть использовано, например, в выпрямителях знакопеременного момента в импульсных передачах.
Целью изобретения является увеличение долговечности путем уменьшения трения в Элементах кинематической цепи механизма.
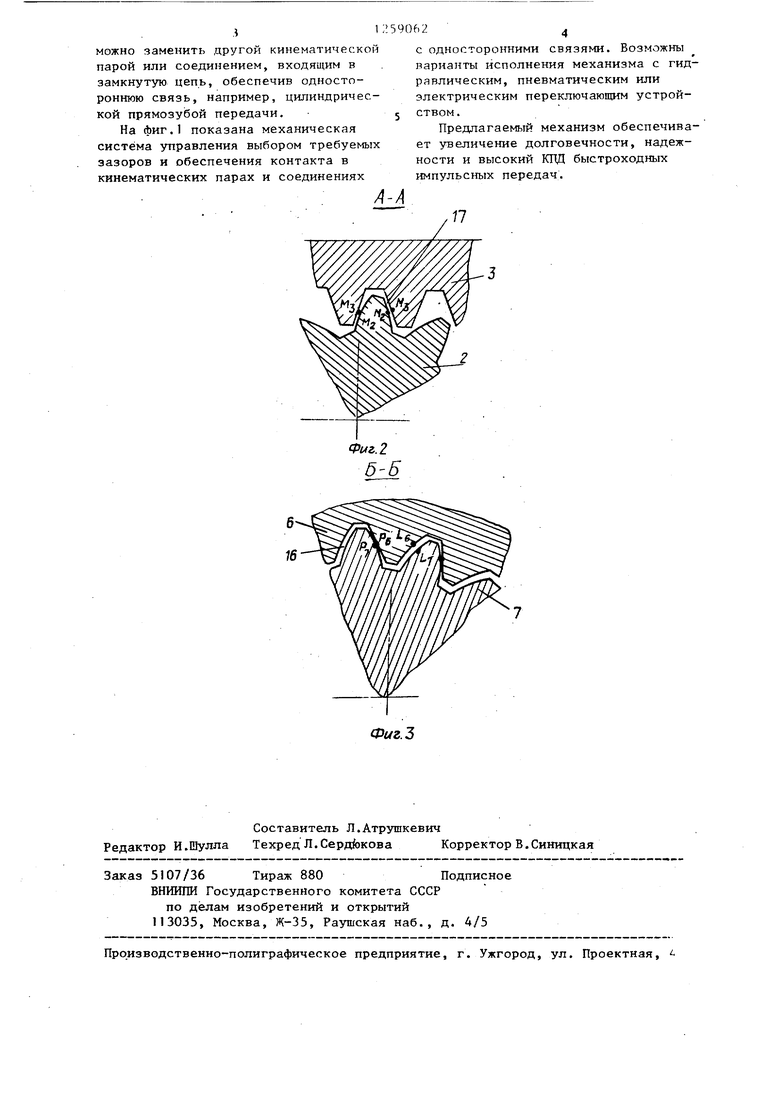
На фиг.1 изображена кинематическая схема механизма; на фиг. 2 - сечение А-А на фиг.1; на фиг.З - сечение Б-Б на фиг.1.
Механизм свободного хода содержит ведущий вал 1, на котором закреплено червячное колесо 2, входящее в зацепление с червяком 3, образуя самотормозящую червячную передачу, ось червяка установлена на подшипниках в корпусе 4. На валу 1 закреплено зубчатое колесо 5, входящее в зацепление с шестерней 6, образуя цилиндрическую прямозубую передачу. Промежуточный вал 7 соединен с шестерней 6 подвижным шлицевым соединением. Промежуточный вал .7 состоит из двух частей, соединенных между собой с помощью самотормозящей винтовой пары 8, имеющей угол подъема резьбы cJ. 90-Ч, где Ч - угол трения На части 9 промежуточного дала 7 закреплено коническое колесо 10, входящее зацепление с коническим колесом 1.1. Часть 12 промежуточного вала 7 может перемещаться в осевом направлении и фиксироваться пружинным щто- ком 13 переключающего устройства в двух различных позициях 14 или 15 относительно корпуса 4, обеспечивая контакт .зубьев в требуемых точках червячной пары и шлицевого соединения. Между противоположными поверхностями зубьев червячной пары и шлицевого соединения имеются гарантированные односторонние зазоры 16 и 1 Ведомый вал 18 соединен с корпусом Ведущий и ведомый элементы связаны замкнутой кинематической.цепью с передаточным отношением, равным единице , образованной элементами механизма.
При сообщении валу 1 положительного импульса (против вращения часовой стрелки, если смотреть по направлению стрелки 6 ) крутящий момент передается на червячное колесо 2, зубья которого контактируют по поверхностям, на которых находятся
точки М (фиг.2), а так как передача самотормозящая, то этот момент пере- .дается на опоры червяка и далее на корпус 4 и соединенный с ним ведомый вал 18. Положительный момент не может передаваться по кинематической цепи 5-6-7-5-9-10-11-3 на червячный вал, так как отсутствует контакт то чек L. и L шлицевого соединения.
Ь
При подаче на вал 1 отрицательного импульса крутящий момент не передается через червячную кинематическую пару, так как точки N и N, не контактируют, а движение сообщает5 ся колесу 5 и далее с помош1 ю шестерни 6 на вал 7, так как контактируют точки шлицевого соединения Р и Р , самотормозящуюся винтовую пару 8, колеса 10 и II - червячному валу.
0 Червячный вал вращается с относительной угловой скоростью uJ -13 2, где 132 - передаточное отношение червячной передачи; v - угловая скорость червячного колеса. Так как
5 общее передаточное отношение замкнутой кинематической цепи механизма равно единице, то зазоры между точками N и N. не изменяются. Этот режим соответствует свободному ходу.
0 Потери в червячной паре механизма отсутствуют., так как отсутствует момент закрутки.
Для реверсирования механизма шток 13 переключающего устройства следует совместно с промежуточным валом
7переместить в направлении стрелки В в позицию 15. При этом благодаря наличию самотормозящейся винтовой пары
8части 9 и 12 вала 7 поворачиваются 0 одна относительно другой, точки L,
и Ly поверхности зубьев шлицевого соединения входят в контакт, а точки Р и RJ другой поверхности зубьев пшицевого соединения выходят из со5 прикосновения. Аналогично точки N и N зубьев червячной пары начинают контактировать, а точки М и М другой поверхности зубьев червячной пары выходят из зацепления. После
,. этого при подаче отрицательного импульса крутящий момент передается на вал 18 в противоположном направлении. Зазоры в червячной передаче и шли- цевом соединении должны быть рассчи таны такими, чтобы при деформации . звеньев под нагрузкой не нарушились указанные требуемые условия. Шлице- лпе соединение шестерни 6 и вала 7
)i
можно заменить другой кинематической парой или соединением, входящим в замкнутую цепь, обеспечив одностороннюю связь, например, цилиндрической прямозубой передачи.
На фиг.1 показана механическая система управления выбором требуемых зазоров и обеспечения контакта в кинематических парах и соединениях
с односторонними связями. Возможны варианты исполнения механизма с гидравлическим, пневматическим или электрическим переключающим устройством.
Предлагаемый механизм обеспечивает увеличение долговечности, надежности и высокий КПД быстроходных импульсных передач.
Составитель Л.Атрушкевич Редактор И.Шулла Техред Л.Сердйкова Корректор В,Синицкая
Заказ 5107/36 Тираж 880Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Червячно-цилиндрическая передача | 2022 |
|
RU2784495C1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 2007 |
|
RU2361130C1 |
| СПОСОБ УПРАВЛЕНИЯ ГУСЕНИЧНОЙ МАШИНОЙ | 2024 |
|
RU2835218C1 |
| ЗУБЧАТАЯ ПЕРЕДАЧА С ПЕРЕМЕННОЙ СКОРОСТЬЮ | 2003 |
|
RU2247271C2 |
| УСТРОЙСТВО ДЛЯ ОТВОРАЧИВАНИЯ ТРУБ В СКВАЖИНЕ | 1991 |
|
RU2023862C1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 1996 |
|
RU2076255C1 |
| ЗУБЧАТЫЙ ВАРИАТОР | 1997 |
|
RU2136988C1 |
| МЕХАНИЗМ АВТОМАТИЧЕСКОГО ОСТАНОВА СУППОРТА | 1971 |
|
SU290812A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛИРОВОЧНЫЙ РЫЧАГ | 2004 |
|
RU2282072C2 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |

| Муфта свободного хода | 1980 |
|
SU898169A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
