циональный преобразователь 17с характеристикой типа сухого трения, нелинейный элемент 36 и бесконтактны ключ 35. Выпрямитель 4 и инвертор 7 снабжены СУ 16, 20. Входы СУ 20 и преобразователя числа фаз (1ТЧФ)21 соединены с выходом блока 26 измерения фазных потокосцеплений СД1. Входы блока 26 через трансформаторы напряжений 24, 27 соединены со статор- ными обмотками СД 1. Вход СУ 16 соединен с выходом ПЧФ 21 через регуляторы тока 15 и скорости 14, измеритель скорости 23 и векторный анализатор 22. Введение блока 26,
Изобретение относится к электрб- .технике, в частности к вентильным электроприводам с синхронными двигателями и зависимыми инверторами тока, и может быть использовано в системах автоматического управления вентильными электродвигателями, например, в нефтяной, горнорудной, металлургической и др. отраслях . промьшшенности,
Целью изобретения является повышение надежности и точности управления вентильнь м электроприводом.
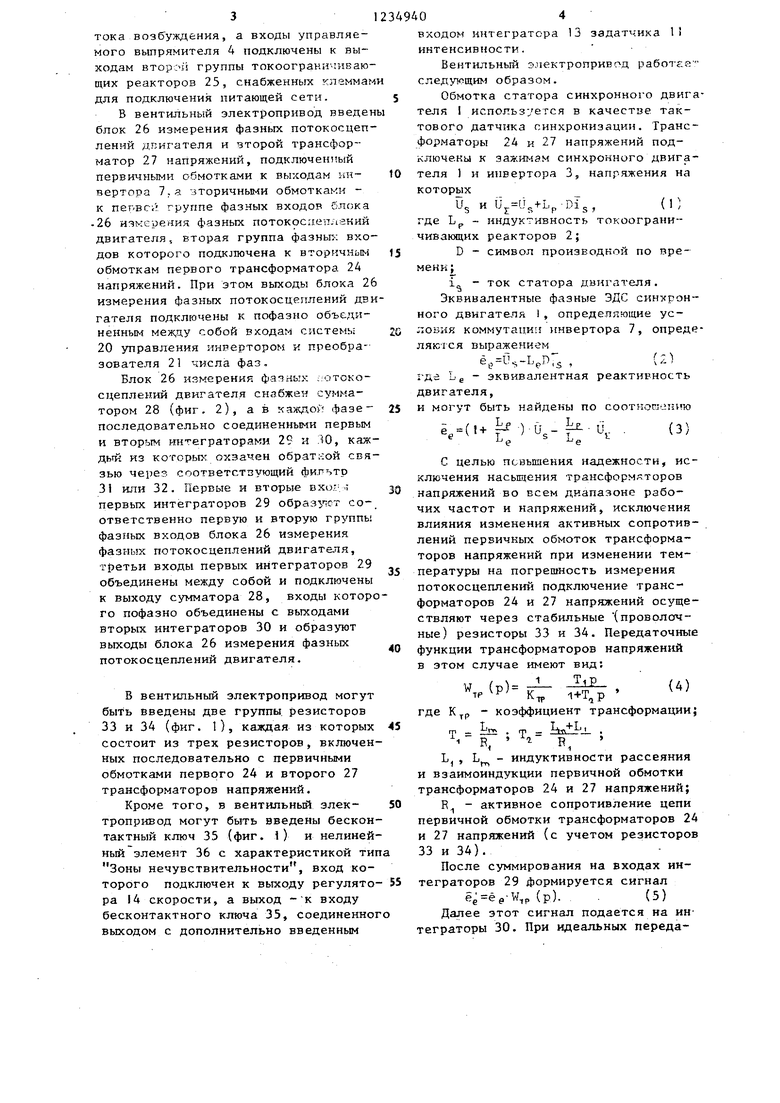
На фиг. 1 представлена функциональная схема вентильного электропривода; на фиг. 2 - функциональная схема блока измерения фазных потокосцеплений синхронного двигателя .
Вентильный электропривод содержи синхронный двигатель 1, статорные обмотки которого через первую групп токоограничивающих реакторов 2 подключены к выходам преобразователя 3 частоты, снабжённого последовательно соединенными управляемым выпрямителем 4, сглаживающим реакторо 5, датчиком 6 тока силовой цепи и инвертором 7, а обмотка возбуждения синхронного двигателя 1 через датчи 8 тока возбуждения подключена к вых ду регулируемого возбудителя 9, последовательно соединенные задатчик 10 скорости, задатчик П интенсивтрансформатора 27, резисторов 33, 34, включенных последовательно с первичными обмотками трансформаторов 24, 27, бесконтактного ключа 35 и нелинейного элемента 36 обеспечивает работу СУ электроприводом от сигналов фазных потокосцеплений СД 1, по- грешность в измерении которых от высокочастотных помех невелика, ис- кл ючает нетиповые переходные процессы в СУ, уменьшает удары в механической передаче и рабочей машине, вызванные пульсациями момента и скорости СД 5 в зоне малых скоростей 2 3,п, ф-лы, 2 ил,
ности, снабженный релейным элементом 12 и интегратором 13, охваченными отрицательной обратной связью, регулятор 14 скорости, регулятор 15 тока
силовой цепи и систему 16 управления вьтрямителем, последовательно соединенные функциональный преобразователь 17 с характеристикой типа сухого трения, регулятор 18 тока
возбуждения и систему 19 управления возбудителем, выход которой подключен к входу регулируемого возбудителя 9, систему 20 управления инвертором, последовательно соединенйые преобразователь 21 числа фаз, векторный анализатор 22 и измеритель 23 скорости, выход которого подключен к входу обратной связи регулятора 14 скорости первый трансформатор
24 напряжений, подключенный первичными обмотками к статорным обмоткам
с гахрониого двигателя 1 и связанный вторичными обмотками с входами системы 20 управления инвертором и
входами преобразователя 21 числа фаз J при этом выход датчика 6 тока силовой цепи подключен к входу обратной связи регулятора 15 тока сило- ,вой цепи, выход регулятора 14 скорости подключен к входу функционального преобразователя 7 с характеристикой типа сухого трения, выход датчика 8 тока возбуждения подключен к входу обратной связи регулятора 18
тока возбуждения, а входы управляемого выпрямителя 4 подключены к выходам втор, группы токоограннчнваю- щих реакторов 25, снабженных клеммам для подключения питающей сети.
В вентильный электропривод введен блок 26 измерения фазных потокосцеп- лений двигателя и второй трансформатор 27 напряжений, подключенный первичными обмотками к выходам нп- вертора 7,а вторичными обмотками - к первси. группе фазных входов блока -26 измерения фазных потокосаеп-чвкий двигателя, вторая группа фазных входов которого подключена к вторнчньм обмоткам первого трансформатора 24 напряжений. При этом выходы блока 26 измерения фазных потокосцеплений двигателя подключены к пофазно объе;и5 ненным меж,цу собой входам системь 20 управления инвepтopo s к преобразователя 21 числа фаз.
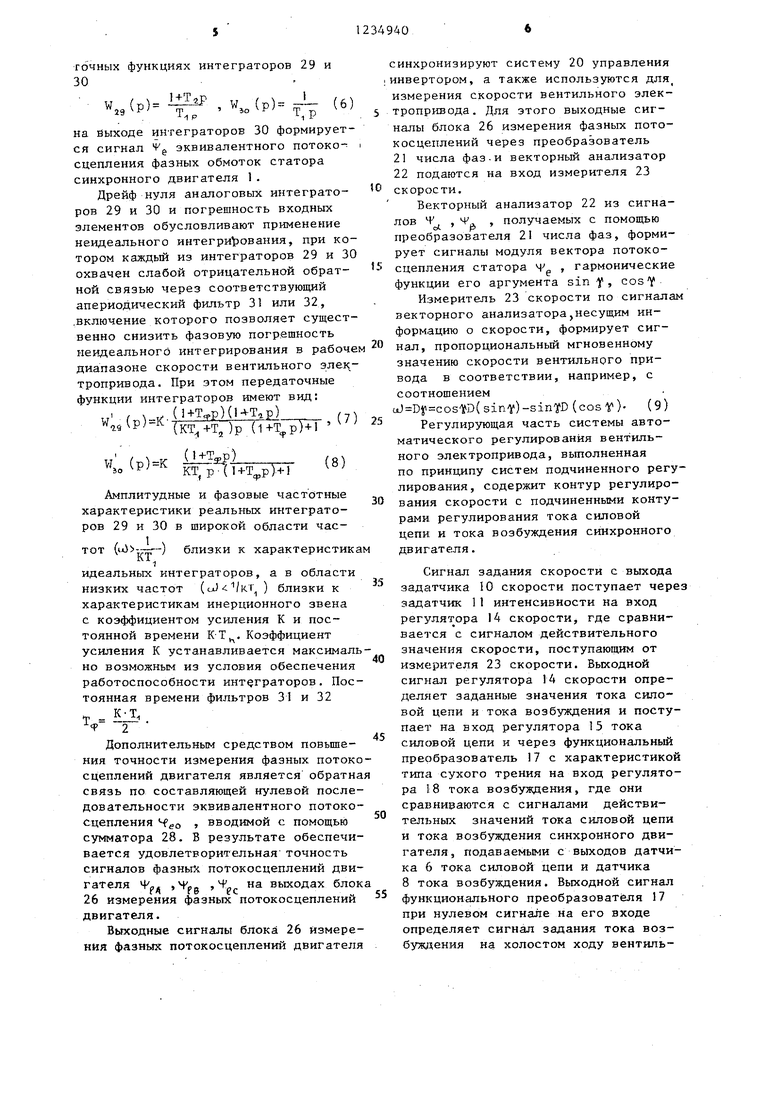
Блок 26 измерения фазных ;:отоко- сцеплений двигателя снабжен сумматором 28 (фиг. 2), а в каждой фазе- последовательно соединенными первым и вторым интеграторами 29 и 30, каж- дьгй из которьк охзачен обратной связью через соответствующий фильтр 31 или 32. Первые и вторые вхо.- .; первых интеграторов 29 образ пот соответственно первую и вторую группы фазных входов блока 26 измерения фазных потокосцеплений двигате-пя, третьи входы первых интеграторов 29 объединены между собой и подключены к выходу сумматора 28, входы которого пофазно объединены с выходами вторых интеграторов 30 и образуют выходы блока 26 измерения фазньк потокосцеплений двигателя.
В вентильный электропривод могут быть введены две группы, резисторов 33 и 34 (фиг. 1), каждая из которых состоит из трех резисторов, включенных последовательно с первичными обмотками первого 24 и второго 27 трансформаторов напряжений.
Кроме того, Б вентильный элек- тропривод могут быть введены бесконтактный ключ 35 (фиг. 1) и нелинейный элемент 36 с характеристикой тип Зоны нечувствительности, вход которого подключен к выходу регулято- ра 14 скорости, а выход - к входу бесконтактного ключа 35, соединенног выходом с дополнительно введенным
входом интегратора 13 задатчиха 1 интенсивности.
Вентильный электропривод работее cлeдy5oщи образом.
Обмотка статора синхронного двигателя I используется в качестве тактового датчика синхронизации. Трансформаторы 24 и 27 напряжений подключены к зажимам синхронного двигателя 1 и инвертора 3, напряжения на которых
и.
и Uj,U.,tLp-Dis,
(О
где LP - индуктивность тор;оограни- чивающих реакторов 2;
D - символ производной по времени;
i - ток статора двигателя. Эквивалентные фазные ЭДС синхронного двигателя i, определяющие условия коммутации инвертора 7, опредляются выражением
ё.-и.-ь.п:, (
где Lg - эквивалентная реактивность
двигателя,
и могут быть найдены по соотиоиепию
, (К b-) Lp е
(3)
С целью псвьппения надежности, исключения насыщения трансформаторов напряжений во всем диапазоне рабочих частот и напряжений, исключения влияния изменения активных сопротивлений первичных обмоток трансформаторов напряжений при изменении температуры на погрешность иэмер1ения потокосцеплений подключение трансформаторов 24 и 27 напряжений осуществляют через стабильные (проволочные) резисторы 33 и 34. Передаточные функции трансформаторов напряжений в этом случае имеют вид:
(4)
. (Р) |Г
1-«-Т„р
ЧР 1 где - коэффициент трансформации;
Ь- . т - +ь, .
R. R.
тР
т
L, L - индуктивности рассеяния и взаимоиндукции первичной обмотки трансформаторов 24 и 27 напряжений;
R - активное сопротивление цепи первичной обмотки трансформаторов 24 и 27 напряжений (с учетом резисторов 33 и 34).
После суммирования на входах интеграторов 29 формируется сигнал ,p (р). . (5)
Далее этот сигнал подается на ин теграторы 30. При идеальных передаточных функциях интеграторов 29 и 30
ькг т
W,Jp)
W, (р)
(6)
на йыходе интеграторов 30 формируется сигнал эквивалентного потоко- сцепления фазных обмоток статора синхронного двигателя 1.
Дрейф нуля аналоговых интеграторов 29 и 30 и погрешность входных элементов обусловливают применение неидеального интегрирования, при котором каждый из интеграторов 29 и 30 охвачен слабой отрицательной обратной связью через соответствующий апериодический фильтр 31 или 32, .включение которого позволяет существенно снизить фазовую погрешность неидеального интегрирования в рабоче диапазоне скорости вентильного тропривода. При этом передаточные функции интеграторов имеют вид:
и f у,. ()() ,j.
W«(P)-I (KT,+Tjp(l+T р)Г
VI (р)К
()
(8)
КТ, р-().+ 1
Амплитудные и фазовые частотные характеристики реальных интеграторов 29 и 30 в широкой области час1
близки к характеристика
тот (.-} КТ
идеальных интеграторов, а в области низких частот (cJ /KT ) близки к характеристикам инерционного звена с коэффициентом усиления К и постоянной времени К-Т. Коэффициент
усиления К устанавливается максимальНо возможным из условия обеспечения
работоспособности интеграторов. Постоянная времени фильтров 31 и 32
Т Lb 2
Дополнительным средством повышения точности измерения фазных потоко- сцеплений двигателя является обратная связь по составляющей нулевой последовательности эквивалентного потоко- сцепления вводимой с помощью сумматора 28. В результате обеспечивается удовлетворительная точность сигналов фазных поТокосцеплений двигателя H j, «Ур , Ч на выходах блока 26 измерения фазных потокосцеплений
двигателя.
Выходные сигналы блока 26 Измерения фазных потокосцеплений двигателя
o
5
0
5
0
0
5
0
синхронизируют систему 20 управления инвертором, а также используются для измерения скорости вентильного электропривода. Для этого выходные сигналы блока 26 измерения фазных потокосцеплений через преобразователь
21числа фаз - и векторный анализатор
22подаются на вход измерителя 23 скорости.
Векторный анализатор 22 из сигналов V , ц , получаемых с помощью преобразователя 21 числа фаз, формирует сигналы модуля вектора потоко- сцепления статора ч- , гармонические функции его аргумента sin у, cos
Измеритель 23 скорости по сигналам векторного анализатора,несущим информацию о скорости, формирует сигнал, пропорциональный мгновенному значению скорости вентильного привода в соответствии, например, с соотношением aJ Dy cos lfD( sin1i)-sin1fri (cos V)- (9)
Регулирующая часть системы автоматического регулирования венТиль- ного электропривода, вьтолненная по принципу систем подчиненного регулирования, содержит контур регулирования скорости с подчиненными контурами регулирования тока силовой цепи и тока возбуждения синхронного двигателя.
Сигнал задания скорости с выхода задатчика 10 скорости поступает через эадатчик 11 интенсивности на вход регулят ора 14 скорости, где сравнивается с сигналом действительного значения скорости, поступающим от измерителя 23 скорости. Выходной сигнал регулятора 14 скорости определяет заданные значения тока силовой цепи и тока возбуждения и поступает на вход регулятора 15 тока силовой цепи и через функциональный преобразователь 17 с характеристикой типа сухого трения на вход регулятора 18 тока возбуждения, где они сравниваются с сигналами действительных значений тока силовой цепи и тока возбуждения синхронного двигателя, подаваемь1ми с выходов датчика 6 тока Силовой цепи и датчика 8 тока возбуждения. Выходной сигнал функционального преобразователя 17 при нулевом сигнале на его входе определяет сигнал задания тока возбуждения на холостом ходу вентиль
ного зле1 тропривода, с ростом сигнала задания тока силовой цепи сигнал задания тока возбуждения синхронного двигателя возрастает, формируя требуемые характеристики вентильного электропривода,
Коммутация тиристоров инвертора 7 в зоне малых частот - искусственная путем перевода управляемого выпрямителя 4 в зону прерьшистых токов С целью исключения нетиповых переходных процессов в системе автомати- .ческого регулирования введение ограничения тока силовой цепи осуществляется воздействием на задание регу- лятора 14 скорости через интегратор 13 задатчика 11 интенсивности. При подаче команды на коммутацию инвертора 7 в зоне малых частот замыкаетс бесконтактный ключ 35, которым на интегратор 13 задатчика интенсив.нас- ти вводится сильная отрицательная обратная связь по заданию тока силовой цепи через нелинейный элемент 36 с характеристикой типа Зоны нечувствительности.
Эта связь обеспечивает ограничение задания тока силовой цепи на уровне, определяемом зоной нечувствительности нелинейного элемента 36. Ток силовой цепи под действием регулятора 15 тока силовой цепи спадает до заданного значения. Обеспечивается коммутация тиристоров инвертора 7. После определенной паузы восстанавливается исходная структура системы автоматического регулирования.
При таком способе коммутации тиристоров инвертора 7 достигается по- вьппение частоты и снижение амплитуды пульсаций вращающего момента и скорости синхронного двигателя 1.
Таким образом, введение в вентильный электропривод блока измерения фазных потокосцеплений двигателя, второго трансформатора напряжений, резисторов, включенных последовательно с первичньми обмотками трансформаторов напряжений, бесконтактного ключа и нелинейного элемента типа зоны нечувствительности позволяет реализовать работу системы управления вентильньм электроприводом от сигналов фазных потокосцеплений двигателя, погрешность в измерении которых от влияния пульсаций напряжений на зажимах синхронного двига
9408
теля и инвертора высокочастотных помех невелика вследствие использования интеграторов и практического постоянства амплитуды сигналов в широком диапазоне частот, исключить нетиповые переходные процессы в системе управления вентильным электроприводом, уменьшить удары в механической передаче и рабочей машине, вызванные пульсациями момента и .корости синхронного двигателя в зоне малых скоростей и повысить за счет этого надежность и точность работы вентильного электропривода.
f50
25
30
S
0
5 0 5
Формула изобретения
1. Вентильньй электропривод, содержащий синхронный двигатель, ста- торные обмотки которого через первую группу токоограничивающих реакторов подключены к выходам преобразователя частоты, снабженного последовательно соединенными управляемьм выпрямителем, сглаживающим peaктopOi, датчиком тока силовой цепи и инвертором, а обмотка возбуждения синхронного двигателя через датчик тока возбуждения подключена к выходу регулируемого возбудителя, последовательно соединенные задатчик скорости, задатчик интенсивности, снабженный релейным элементом и интегратором, охваченными отрицательной обратной связью, регулятор скорости, регулятор тока силовой цепи и систему управления выпрямителем, последовательно соединенные функциональный преобразователь с характеристикой типа сухого трения, регулятор тока возбуждения и систему управления возбудителем, выход которой подключен к входу регулируемого возбудителя, систему управления инвертором, последовательно соединенные преобразователь числа фаз, векторный анализатор и измеритель скорости, выход которого ПОДКЛЮ7
чен к входу обратной связи регулятора скорости, первый трансформатор напряжений, подключенный первичными обмотками к статорным обмоткам синхронного двигателя и связанный вторич- ньми обмотками с входами системы управления инвертором и входами преобразователя числа фаз, при этом выход датчика тока силовой цепи подключен к входу обратной связи регулятора тока силовой цепи, выход регулятора скорости подключен к входу
функционального преобразователя с характеристикой .типа сухого трения, выход датчика тока возбуткдения - к входу обратной связи регулятора тока возбуждения, а входы управляемого вьтрямителя - к выходам второй групп Токоограничивающих реакторов, снабженных клеммами для подключения питающей сети, отличающий- с я тем, что, с целью повышения надежности и точности управления, в него введены блок измерения фазных потокосцеплений двиг ателй и второй трансформатор напряжений, подключенный первичными обмотками к выходам инвертора, а вторичными обмотками - к первой группе фазных входов блока измерения фазных потокосцепленнй двигателя, вторая группа фазных входов которого подключена к вторичным об- моткам первого трансформатора напряжений, при этом выходы блока измерения фазных потокосцеплений двигателя подключены К пофазно объединенным между собой входам системы управле- НИН инвертором и преобразователя числа фаз, причем блок измерения фазных потокосцеплений двигателя снабжен сумматором, а в каждой фазе - последовательно соединенными первым и вторым интеграторами, каждый
из которых охвачен обратной связью через соответствующий фильтр, первые и вторые входы первьпс интеграторов образуют соответственно первую и вторую группы фазных входов блока измерения фазных потокосцеплений двигателя, третьи входы первых интеграторов объединены между собой и подключены к выходу сумматора, входы которого пофазно объединены с выходами вторых интеграторов и образуют выходы блока измерения- фазных потокосцеплений двигателя.
2.Электропривод по п. , отличающийся тем, что в него введены две группы резисторов, каждая из которых состоит из, трех резисторов, включенных последовательно с первичными обмотками первого
и второго трансформаторов напряжений
3.Электропривод по пп. 1 и 2, отличающийся тем, что
в него введены бесконтактный ключ и нелинейный элемент типа зоны нечувствительности, вход которого Подключен к выходу регулятора скорости, а выход - к входу бесконтактного ключа, соединенн ого выходом с дополнительно введенным входом интегратора задатчика интенсивности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Устройство для частотного пуска и синхронизации с сетью синхронной машины | 1983 |
|
SU1252890A1 |
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод переменного тока | 1990 |
|
SU1750015A1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |

Изобрете ше относится к электротехнике и представляет собой вентильный электропривод. Цель изобретения - повьппение надежности и . точности управления электроприводом. Статорные обмотки синхронного двигателя (СД)1 электропривода соединены с питающей сетью через последовательно соединенные первую группу токоограничивающих реакторов 2, инвертор 7, управляемый выпрямитель 4 со сглаживающим дросселем 5 и датчиком тока 6 в силовой цепи и вторую группу токоограничивающих реакторов 25. Обмотка возбуждения СД1 соединена с задатчиком интенсивности I 1 через датчик тока возбуждения 8, систему управления (СУ)19 возбудителем, регулятор тока возбуждения 18, функ(О (Л 1C 00 со 4; u.t
Utt
Редактор А. Лежнина
Vut.Z
Составитель А. Жилин
Техред В. Кадар Корректор М. Демчик
Заказ 2989/56 Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий П3035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предлриятие, г. Ужгород, ул. Проектная, 4
