1
Изобретение относится к измерительной технике и может быть использовано для измерения линейных размеров оптическими методами, например для определения толщины прозрачных объектов плоской, цилиндрической и трубчатой форм, непрозрачных плоских объектов,а также для измерения расстояний до них.
Целью изобретения является обеспечение возможности измерения прозрачных объектов цилиндрической и трубчатой формы за счет корректировки положения объекта.
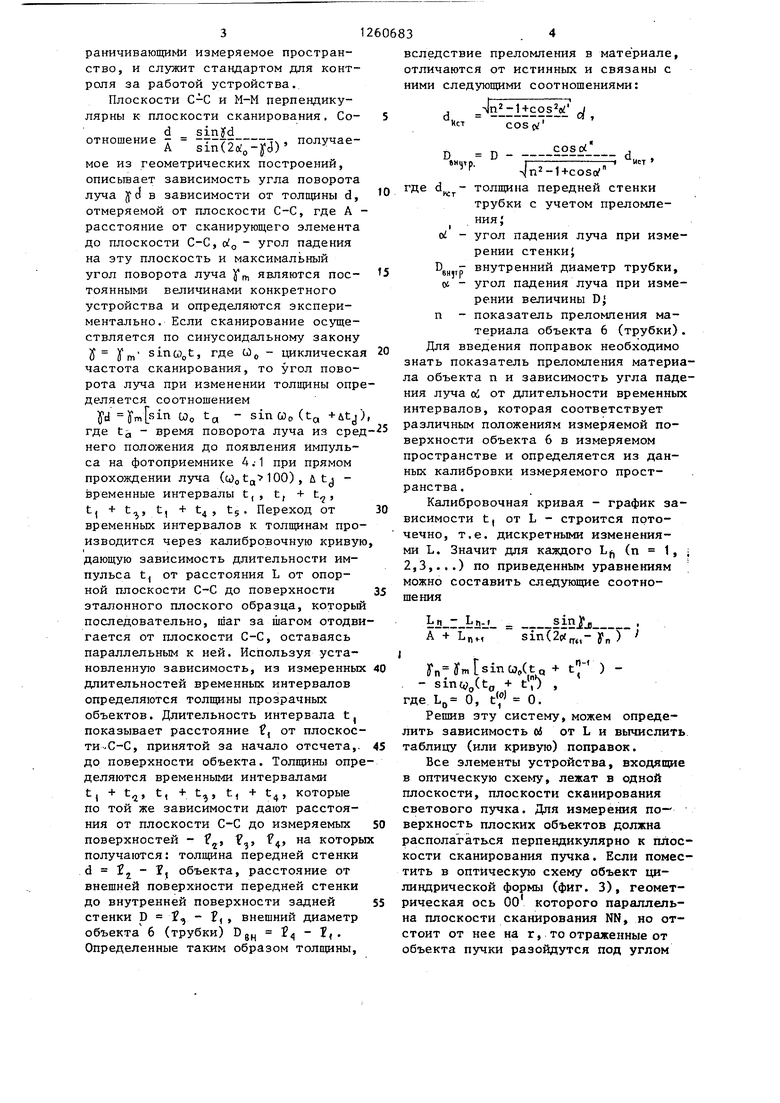
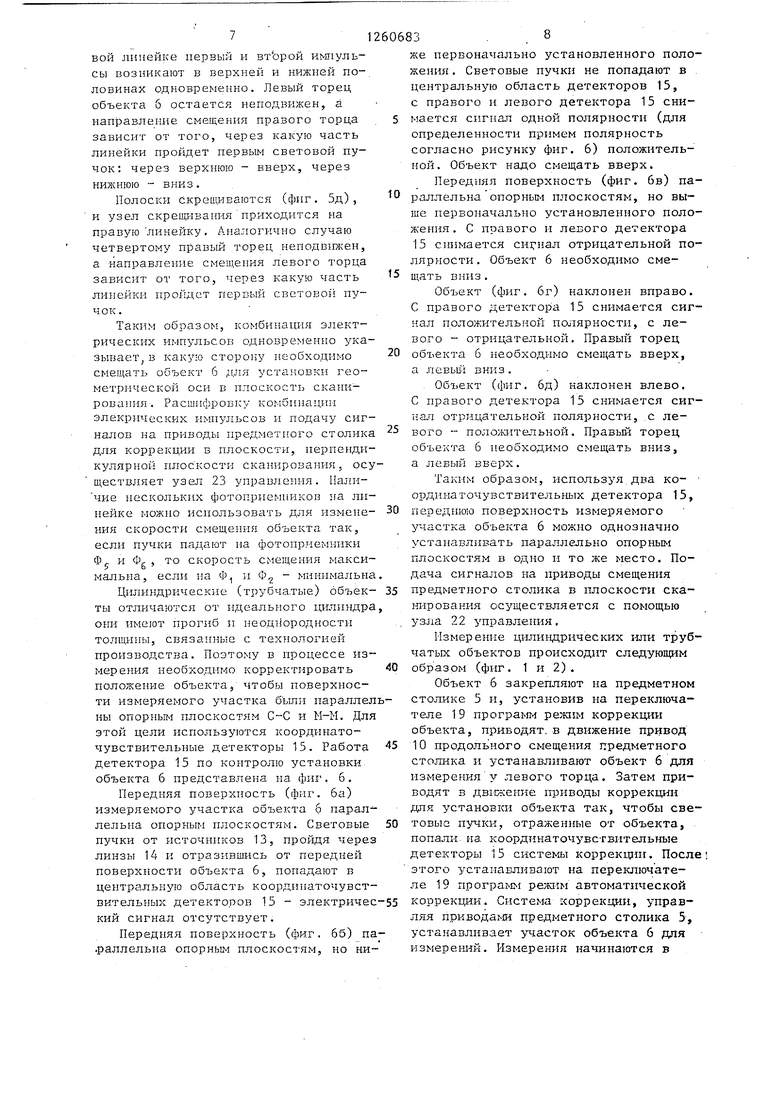
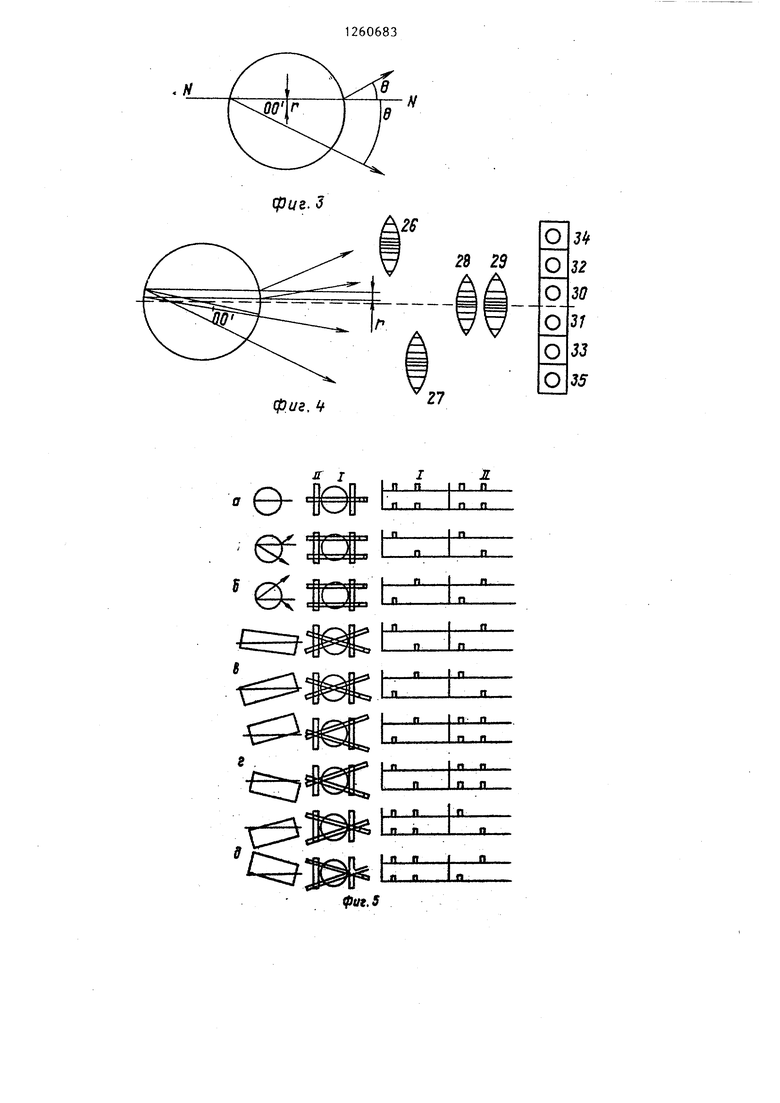
На фиг. 1 схематически представлено устройствоj на фиг. 2 - блок- схема электронного блокад на фиг.З - ход лучей в случае, когда геометрическая ось цилиндрического объекта отстоит от плоскости сканирования на величину rj на фиг. 4 - образование рассогласованных и согласованных световых пучков, отраженных от цилиндрического объекта, и возможto
держит формирователь 18, переключатель 19 программ, измеритель 20, регистратор 21, узел 22 управления приводами коррекции в плоскости сканирования, узел 23 управления приводами движения перпендикулярно плоскости сканирования, узел 24 управления поворотом цилиндрического объекта вокруг оси, узел 25 управления продольным смещением измеряемого объекта.
Устройство работает следующим образ ом.
При сканировании световые пучки, 15 отраженные от зеркал 3, на фотоприемниках 4.1 и 4.2 формируют импульсы- синхронизации, а пучки, отраженные от объекта 6, объективом 11 собираются на фотоприемнике 12 и формируют 20 импульсы, соответствующие пучкам, отраженным от всех поверхностей объекта 6.
За прямое прохождение пучка принято направление, при котором сначала
ность применения специальных фоточув- появляется импульс на фотоприемнике
4.1, затем импульс на фотоприемника 12 и завершающий прохождение импульс . на фотоприемнике 4.2, обратное - соответственно импульс на фотоприемни- 30 ке 4.2, импульсы на фотоприемнике 12 и импульсы на фотоприемнике 4.1, Все эти импульсы поступают в формирователь 18, который формирует импульсы только при прямом прохождении пучка.
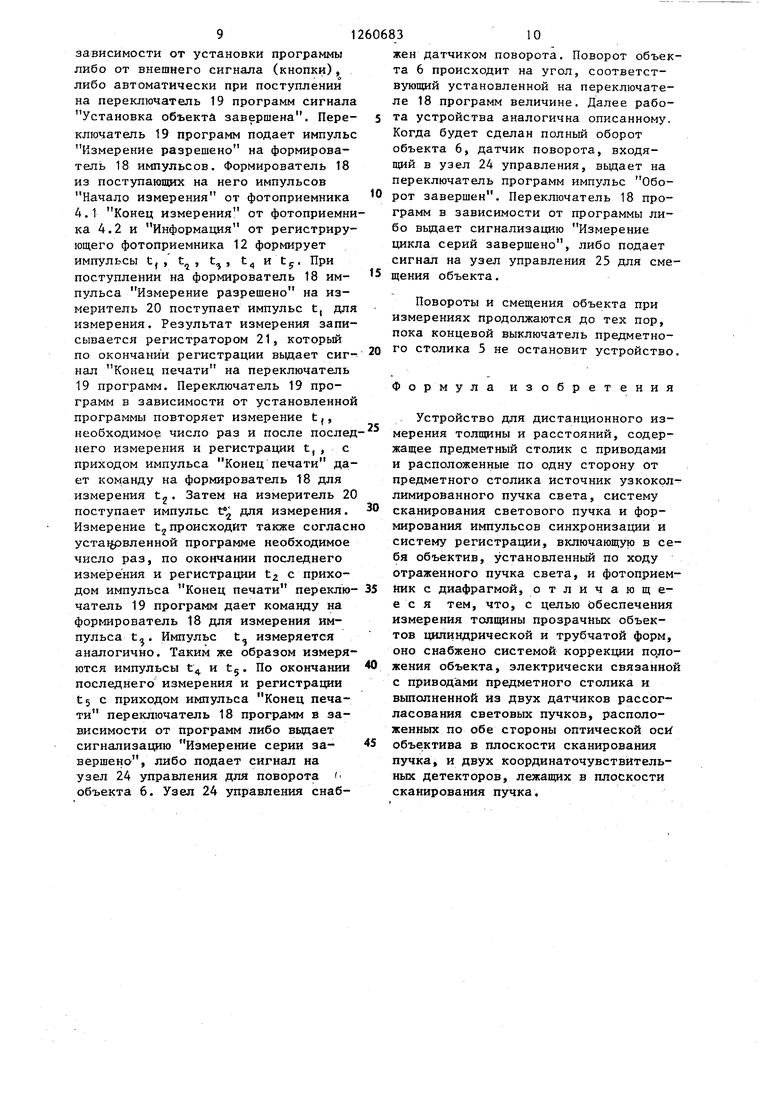
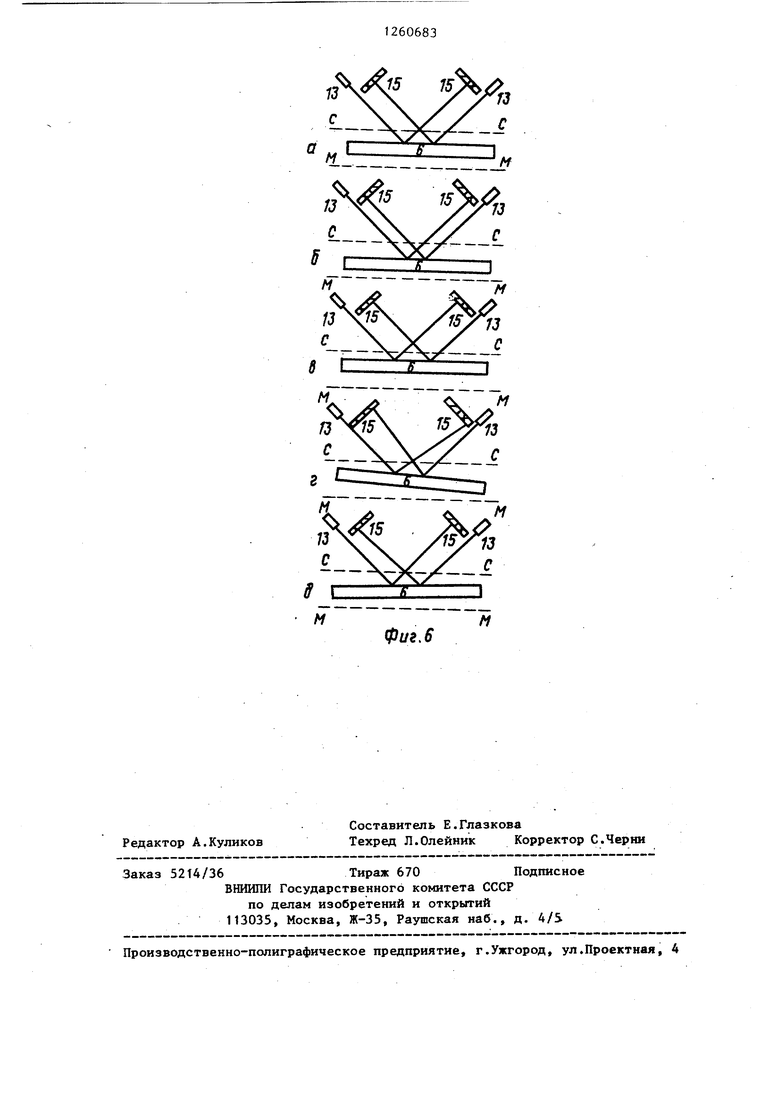
ствительных линеек для контроля рассогласования пучковi на фиг. 5 - работа датчиков рассогласования световых пучков, отраженных от цилиндрического объекта; на фиг. 6 - работа координаточувствительных детекторов по контролю установки объекта для измерений.
Устройство для дистанционного измерения толщины и расстояния содержит 35 длительность которых равна времени источник 1 узкоколлимированного пуч- между появлением импульса на фото- ка света, систему сканирования свето- приемнике 4.1 и на фотоприемнике 12
вого пучка и формирования импульсов синхронизации, состоящую из узла 2 сканирования, зеркал 3 и двух фотоприемников 4.1 и 4.2 с диаграммой, предметный столик 5 с измеряемым объектом 6, приводы 7 смещения столика 5 в плоскости сканирования, приводы 8 смещения перпендикулярно плос- 45 случае измерения цилиндра его диаметкости сканирования, привод 9 поворота цилиндрического объекта 6 вокруг оси, привод 10 продольного смещения, объектив 11, установленный по ходу отраженного пучка света, регистриру- юпщй фотоприемник 12 с диафрагмой, систему коррекции, состоящую из двух дополнительных источников 13 узкоколлимированного пучка света, двух
линз 14, связанных с ними, двух коор- 55 трубки, времени между появлением динаточувствительных детекторов 15 импульса на фотоприемниках 4.1 и и двух датчиков 16 рассогласования, и электронный блок 17, который со4.2 (ty), что соответствует расст нию между плоскостями С-С и М-М,
to
2606832
держит формирователь 18, переключатель 19 программ, измеритель 20, регистратор 21, узел 22 управления приводами коррекции в плоскости сканирования, узел 23 управления приводами движения перпендикулярно плоскости сканирования, узел 24 управления поворотом цилиндрического объекта вокруг оси, узел 25 управления продольным смещением измеряемого объекта.
Устройство работает следующим образ ом.
При сканировании световые пучки, 15 отраженные от зеркал 3, на фотоприемниках 4.1 и 4.2 формируют импульсы- синхронизации, а пучки, отраженные от объекта 6, объективом 11 собираются на фотоприемнике 12 и формируют 20 импульсы, соответствующие пучкам, отраженным от всех поверхностей объекта 6.
За прямое прохождение пучка принято направление, при котором сначала
(tj), что соответствует расстоянию от воображаемой пл(у:кости С-С до по- верхности объекта; времени между
появлением первого и второго импульса на фотоприемнике 12 (t,), что соответствует в случае измерения трубки толщине передней стенки, а в .
ру; времени между появлением первого и третьего импульса на фотоприемнике 12 (tj), что соответствует для трубки расстоянию от внешней поверх- ности передней стенки до внутренней поверхности задней стенки; времени между появлением первого и четвертого импульса на фотоприемнике 12 (t), что соответствует внешнему диаметру
трубки, времени между появлением импульса на фотоприемниках 4.1 и
4.2 (ty), что соответствует расстоянию между плоскостями С-С и М-М, оготношение
получаераничивающини измеряемое пространство, и служит стандартом для контроля за работой устройства.
Плоскости С-С и М-М перпендикулярны к плоскости сканирования. Соd sinjd
А sin( мое из геометрических построений, описьшает зависимость угла поворота луча Jf о в зависимости от толщины d, отмеряемой от плоскости С-С, где А - расстояние от сканирующего элемента до плоскости С-С, - угол падения на эту плоскость и максимальный угол поворота луча fni являются постоянными величинами конкретного устройства и определяются экспериментально. Если сканирование осуществляется по синусоидальному закону у„ sinco t, где сОд - циклическая частота сканирования, то угол поворота луча при изменении толщины определяется соотношением уа «о tg - sinCOoCto, +&tj)
где tg - время поворота луча из сред него положения до появления импульса на фотоприемнике 4 . 1 при прямом прохождении луча (сОо t(, 100) , и t - временные интервалы t, , t, + Ц, t, + t, t, + t4, tg. Переход от временных интервалов к толщинам производится через калибровочную кривую дающую зависимость длительности импульса t, от расстояния L от опорной плоскости С-С до поверхности эталонного плоского образца, который последовательно, шаг за шагом отодвигается от плоскости С-С, оставаясь параллельным к ней. Используя установленную зависимость, из измеренных длительностей временных интервалов определяются толщины прозрачных объектов. Длительность интервала t, показывает расстояние , от плоскос- ти.С-С, принятой за начало отсчета,. до поверхности объекта. Толщины определяются временными интервалами t, + t, t, + t, t, + t, которые no той же зависимости дают расстояния от плоскости С-С до измеряемых поверхностей - f, „, f, на которы получаются: толщина передней стенки d 2j - Г, объекта, расстояние от внешней поверхности передней стенки до внутренней поверхности задней стенки р Г, - Р,, внешний диаметр объекта 6 (трубки) D g J - I,. Определенные таким образом толщины.
вследствие преломления в материале, отличаются от истинных и связаны с ними следующими соотношениями:
, -Jn -l+cosV J
d, :и
COSpf
D,, D - jn -l+cosrf
MCT
где
d«.толщина передней стенки трубки с учетом преломле- , . ния{
Ы - угол падения луча при измерении стенки;
DJ - внутренний диаметр трубки, oi - угол падения луча при измерении величины Dj п - показатель преломпения материала объекта 6 (трубки). Для введения поправок необходимо знать показатель преломления материала объекта п и зависимость угла падения луча of, от длительности временных интервалов, которая соответствует различным положениям измеряемой поверхности объекта 6 в измеряемом пространстве и определяется из данных калибровки измеряемого пространства.
Калибровочная кривая - график зависимости t, от L - строится поточечно, т.е. дискретными изменениями L. Значит для каждого Lf, (п 1, ; 2,3,...) по приведенным уравнениям можно составить следующие соотношения
1;Л til. sin() f
jfn ifm sinG3(,(tq - sinv(to +
+ t
n-f
) +где Ц О, 0.
Решив эту систему, можем определить зависимость о4 от L и вычислить таблицу (или кривую) поправок.
Все элементы устройства, входящие в оптическую схему, лежат в одной плоскости, плоскости сканирования светового пучка. Для измерения по- верхность плоских объектов должна располагаться перпендикулярно к плоскости сканирования пучка. Если поместить в оптическую схему объект цилиндрической формы (фиг. 3), геометрическая ось 00 которого параллельна плоскости сканирования NN, но отстоит от нее на г, то отраженные от объекта пучки разойдутся йод углом
в- к падающему пучку и не попадут на регистрирующий фотоприемник 12, Только когда геометрическая ось цилиндрического (трубки) объекта 6 будет лежать в плоскости сканирова- 5 ния, геометрическая ось параллельна опорным плоскостям С-С и М-М, возможно .измерение объекта. Так как пада- ющий световой пучок имеет размеры г, то отраженные пучки вследствие кри- О визны поверхности будут представлять собой световые полосы неравномерной интенсивности (фиг. 4). Максимум яркости приходится на центральную часть полоски, а к краям интенсив- 5 ность спадает. Если пучок падающего на цилиндрический объект света не проходит через геометрическую ось, то отраженные пучки представляют собой две параллельные симметрично 20 сдвинутые полосы 26 и 27, т.е. имеется рассогласование отраженных пучков . Когда падающий пучок проходит через геометрическую ось, то отраженные пучки представляют собой па- раллельные полосы 28 и 29 (фиг. 4)- согласование отраженных пучков. При сканировании светового пучка, падающего на цилиндрический объект 6, отражение пучков происходит вдоль 30 некоторой длины объекта. Контроль рассогласования отраженных пучков в двух крайних точках этой длины обеспечивает установку геометрической оси этого участка в плоскость 35 сканирования. Датчики 16 рассогласования световых пучков, представляющие собой фоточувствительные линейки, могут быть вьшолнены, например, в виде линеек из шести фотоэлементов 40 с размерами фоточувствительной области (Сравнимой с размерами отраженного светового пятна. Расстояние между фотоприемниками выбирается таким,что при прохождении через любое место 5 линейки световой пучок вызывает электрический импульс. Линейка из фотоэлементов устанавливается перпендикулярно плоскости сканирования та- КИМ образом, что, когда геометричес- 50 кая ось объекта находится в плоскости сканирования, падающие в центральную область линейки пучки приводят к возникновению электрических импульсов на фотоэлементах 30 и 31 55 одновременно (фиг. 4). Если геометрическая ось выйдет из плоскости сканирования, то одновременность
электрических импульсов на фотоэлементах 30 и 31 исчезнет и появятся импульсы на фотоприемниках 32 и 33 или 34 и 35, линейку можно разделить на две части - верхнюю и нижнюю и судить о месте прохождения светового пучка через линейку по месту возникновения электрических импульсов.Для коррекции установки геометрической оси участка измеряемого цилиндрического (трубчатого) объекта используются две такие линейки фотоэлементов расположенные по обе стороны объектива 11.
При прямом прохождении через линейки всегда первым пройдет пучок, отраженный от передней (ближней к регистрирующему фотоприемнику) поверхности объекта . На фиг. 5 прямое направление соответствует ходу отраженных от объекта пучков справа налево.
Световые пучки (фиг. 5а), отраженные от объекта 5 и проходящие через объектив 14 линейки, представляют собой одну горизонтальную полоску. Первый и второй импульсы возникают в верхней и нижней половинах линейки одновременно. Этот случай соответствует установке геометрической оси участка объекта 6 в плоскость сканирования.
Световые пучки (фиг. 56), проходящие на линейки через объектив 11, представляют собой две параллельные горизонтальные полоски. Если первый импульс возникает в верхней части линейки, то объектив параллельно поднимают вверх. Если первый импульс возникает в нижней части линеек, то объектив надо опускать вниз.
Световые полоски (фиг..5в) представляют собой две перекрещивающиеся на объективе 1t полоски. Такой вид полосок говорит о том, что объектив 6 наклонен относительно плоскости сканирования. Если первый импульс возникает в верхней части правой линейки и в нижней части левой линейки, то правый торец объекта 6 надо поднимать, а левый опускать. Если первый импульс возникает в 1Ыжней части правой линейки и в верхней части левой. То надо правый торец объекта 6 опускать, а левый поднимать.
Полоски скрещиваются (фиг. 5г), и узел скрещивания приходится на левую линейку. В этом случае на ле7
вой линейке первый и втЪрой HNffiyjib- сы возникают в верхней и нижней половинах одновременно. Левый торец объекта б остается неподвижен, а направление смещения правого торца зависит от того, через какую часть линейки пройдет первым световой пучок: через верхнюю - вверх, через нижнюю - вниз.
Полоски скрещиваются (фиг. 5д), и узел скрещивания приходится на правую линейку , А.налогично случаю четвертому правый торец неподвижен, а направление смещения левого торца зависит от того, через какую часть линейки пройдет первый световой пучок.
Таким образом, комбинация электрических импульсов одновременно указывает, в какую сторону необходимо смещать объект 6 для установки геометрической оси в плоскость сканирования. Расшифровку комбинации элекрических импульсов и подачу сигналов на приводы предметного столика для коррекции в плоскости, перпендикулярной плоскости сканирования, осуществляет узел 23 управления. Нали- чие нескольких фотоприемников на линейке можно использовать для изменения скорости смещения объекта так, если пучки падают на фотоприемники
то скорость смещения макси10
fS
Ф и Og
мальпа, если на Ф.
и (Р,, минимальна
1260683 . . 8
же первоначально установленного положения . Световые пучки не попадают в центральную область детекторов 15, с правого и ле13ого детектора 15 сни- 5 мается одной полярности (для определенности примем полярность согласно рисунку фиг. 6) положительной. Объект надо смещать вверх.
Передняя поверхность (фиг. 6в) параллельна опорным плоскостям, но выше первоначально установленного положения. С правого и левого детектора 15 снимается си1гиал отрицательной полярности . Объект 6 необходимо смещать вниз .
Объект (фиг. 6г) наклонен вправо. С правого детектора 15 снимается сигнал положительной полярности, с левого - отрицательной. Правый торец объекта 6 необходимо смещать вверх, а левьш вниз.
Объект (фиг. бд) наклонен влево. С правого детектора 15 снимается сигнал отрицательной полярности, ,с левого -- положительной. Правый торец объекта б необходимо смещать вниз, а левый вверх.
Таки л образом, используя два ко- ордниаточувствительных детектора 15, переднюю поверхность измеряемого :: г- 1астка объекта 6 можно однозначно устанавливать параллельно опорным плоскостям в одно и то же место. Подача сигналов на приводы смещения
20
25
30
Цилиндрические (трубчатые) объек- 35 предметного столика в плоскости скаты отличаются от идеального цилиндра они имеют прогиб и неоднородности толщины, связанные с технологией производства. Поэтому в процессе измерения необходимо корректировать положение объекта, чтобы поверхности измеряемого участка были параллелны опорным плоскостям и М-М. Для этой цели используются координато- чувствительные детекторы 15. Работа детектора 15 по контролю установки объекта 6 представлена на фиг. б. Передняя поверхность (фиг. ба) измеряемого участка об зекта б парал лельна опорным плоскостям. Световые пучки от источников 13, пройдя через линзы 14 и отразившись от передней поверхности объекта б, попадают в центральную область координаточувствительных детекторов 15 - электричес-55 коррекции. Система коррекции, управкии сигнал отсутствует.
Передняя поверхность (фиг. 6б) па- .раллельна опорнььм плоскостям, но ни10
fS
60683 . . 8
же первоначально установленного положения . Световые пучки не попадают в центральную область детекторов 15, с правого и ле13ого детектора 15 сни- 5 мается одной полярности (для определенности примем полярность согласно рисунку фиг. 6) положительной. Объект надо смещать вверх.
Передняя поверхность (фиг. 6в) параллельна опорным плоскостям, но выше первоначально установленного положения. С правого и левого детектора 15 снимается си1гиал отрицательной полярности . Объект 6 необходимо смещать вниз .
Объект (фиг. 6г) наклонен вправо. С правого детектора 15 снимается сигнал положительной полярности, с левого - отрицательной. Правый торец объекта 6 необходимо смещать вверх, а левьш вниз.
Объект (фиг. бд) наклонен влево. С правого детектора 15 снимается сигнал отрицательной полярности, ,с левого -- положительной. Правый торец объекта б необходимо смещать вниз, а левый вверх.
Таки л образом, используя два ко- ордниаточувствительных детектора 15, переднюю поверхность измеряемого :: г- 1астка объекта 6 можно однозначно устанавливать параллельно опорным плоскостям в одно и то же место. Подача сигналов на приводы смещения
20
25
30
ш-1рования осуществляется с помощью узла 22 управления.
Измерение цилиндрических или труб- чатьк объектов происходит следующим образом (фиг. 1 и 2).
Объект б закрепляют на предметном столике 5 и, установив на переключателе 19 программ режим коррекции объекта, приводят, в движение привод 10 продоль ного смещения предметного столика и устанавливают объект б для измерения у левого торца. Затем приводят в движение приводы коррекции для установки объекта так, чтобы световые пучки, отраженные от объекта, . попали, на координаточувствителыпз1е детекторы 15 системы коррекщти. После этого устанавливают иа переключателе 19 пpoгpa JM режим автоматической
ляя приводами гфедметиого столика 5, устанавливает участок объекта 6 для измерений. Измерения начинаются в
.
зависимости от установки программы либо от внешнего сигнала (кнопки), либо автоматически при поступлении на переключатель 19 программ сигнала Установка объекта завершена. Пере- ключатель 19 программ подает импульс Измерение разрешено на формирователь 18 импульсов. Формирователь 18 из поступающих на него импульсов Начало измерения от фотоприемника 4.1 Конец измерения от фотоприемника 4.2 и Информадая от регистрирующего фотоприемника 12 формирует импульсы t, , t , Ц, t и ty. При поступлении на формирователь 18 им- пульса Измерение разрешено на измеритель 20 поступает импульс t, для измерения. Результат измерения записывается регистратором 21, которьй по окончании регистрации вьщает сиг нал Конец печати на переключатель 19 программ. Переключатель 19 программ в зависимости от установленной программы повторяет измерение t,, необходимое число раз и после последнего измерения и регистрации t, , с приходом импульса Конец печати да.- ет команду на формирователь 18 для измерения t. Затем на измеритель 20 поступает импульс f Для измерения. Измерение t происходит также согласн уста 4рвленной программе необходимое число раз, по окончании последнего измерения и регистрации t с приходом импульса Конец печати переклю- чатель 19 программ дает команду на формирователь 18 для измерения импульса t. Импульс t, измеряется аналогично. Таким же образом измеряются импульсы t и tj. По окончании последнего измерения и регистрации tj с приходом импульса Конец печати переключатель 18 программ в зависимости от программ либо вьщает сигнализацию Измерение серии за- вершено, либо подает сигнал на узел 24 управления для поворота объекта 6. Узел 24 управления снабt
20
5 о 35 45
25
30
жен датчиком поворота. Поворот объекта 6 происходит на угол, соответствующий установленной на переключателе 18 программ величине. Далее работа устройства аналогична описанному. Когда будет сделан полный оборот объекта 6, датчик поворота, входящий в узел 24 управления, выдает на переключатель программ импульс Оборот завершен. Переключатель 18 программ в зависимости от программы либо вьщает сигнализацию Измерение цикла серий завершено, либо подает сигнал на узел управления 25 для смещения объекта.
Повороты и смещения объекта при измерениях продолжаются до тех пор, пока концевой выключатель предметного столика 5 не остановит устройство.
Формула изобретения
. Устройство для дистанционного измерения толщины и расстояний, содержащее предметный столик с приводами и расположенные по одну сторону от предметного столика источник узкокол- лимированного пучка света, систему сканирования светового пучка и формирования импульсов синхронизации и систему регистрации, включающую в себя объектив, установленный по ходу отраженного пучка света, и фотоприем- Яик с диафрагмой, отличающееся тем, что, с целью обеспечения измерения толщины прозрачных объектов цилиндрической и трубчатой форм, оно снабжено системой коррекции по,ло- жения объекта, электрически связанной с приводами предметного столика и выполненной из двух датчиков рассогласования световых пучков, расположенных по обе стороны оптической оси объектива в плоскости сканирования пучка, и двух координаточувствитель- ных детекторов, лежащих в плоскости сканирования пучка.
5 ..
ZZ
ю
М
м
фиг.1
tpat. 2
фиг. 3
фи, 4
д о о о о о
3
32
30
Л
33
35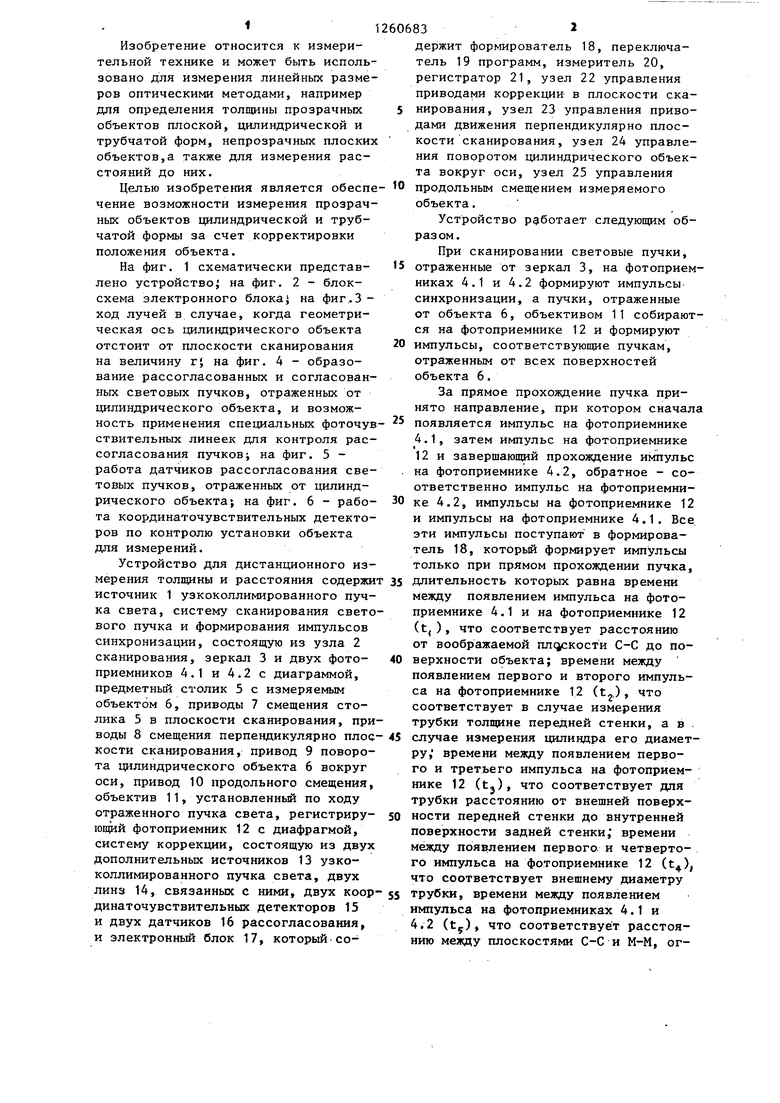


Изобретение относится к области измерения линейных размеров оптическими методами преимущественно прозрачных цилиндрических и трубчатых объектов. Цель изобретения - обеспечение измерения поперечных размеров прозрачных цилиндрических и. трубчатых объектов за счет корректировки положения объектов. Устройство для дистанционного измерения толщ1-1ны плоских непрозрачных объектов использует сканирование лазерного пучка света и формирование длительностей импульсов, берущих начало от опорного уровня, а конец - на поверхности объекта. Объект закрепляется на предметном столике, позволяющем сме- щать его дпя измерений с помощью электромеханических приводов, в устройство введена система коррекции, электрически связанная с приводами предметного столика, состоящая из двух датчиков рассогласования световых пучков и двух однокоординаточув- атвительных детекторов, система позволяет корректировать как перекос, так и поперечное смещение объекта. 6 ил. (Л к О5 о Од 00 оо
9- ©f
I
лп
пп
ип
п
JJп
3
п п
п п
п п
Фиг. 6
| СПОСОБ СЧИТЫВАНИЯ МАГНИТНОГО РЕЛЬЕФА | 0 |
|
SU233948A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
