Изобретение относится к информационно-измерительной технике, а именно к устройствам для бесконтактного измерения криволинейных поверхностей, и может быть использовано для измерения сложнофасонных деталей и контроля процессов деформации в машиностроении.
Известно устройство для измерения сложной поверхности посредством обеспечения возможности измерения двух координат точек измеряемой поверхности. Известное устройство содержит последовательно установленные источник излучения, светоделитель, делящий пучок излучения на измерительный и опорный пучки, и позиционно-чувствительный фотоприемник, установленный в опорном пучке, второй светоделитель, установленный в измерительном пучке по ходу излучения за первым светоделителем, платформу, установленную за источником света по ходу излучения с возможностью возвратно-поступательного перемещения ее вдоль оси опорного пучка, оба светоделителя установлены на платформе с возможностью поворота в плоскости расположения измерительного и опорного пучков. На поверхность измеряемого объекта падает измерительный пучок.
Недостатками предлагаемого устройства является необходимость механического сканирования путем перемещения платформы со светоделителями вдоль объекта измерения по двум направлениям, что предъявляет высокие требования к прецизионному механическому узлу. В связи с этим устройство характеризуется низким быстродействием и невысокими функциональными возможностями.
Наиболее близким является устройство для реализации способа триангуляционных измерений, содержащее источник света, фокусирующий объектив, линейный развертывающий фотоприемник, подвижную платформу со светоделителем, блок обработки выходного сигнала фотоприемника, блок цифровой индикации.
Недостатками предлагаемого устройства являются низкое быстродействие и невысокие функциональные возможности, связанные с необходимостью механического сканирования путем перемещения платформы с измеряемым объектом и светоделителем по двум направлениям (координатам).
Целью изобретения является расширение функциональных возможностей и повышение быстродействия за счет исключения механического сканирования.
Поставленная цель достигается тем, что в устройстве для определения координат поверхности объекта, содержащем лазер, объектив, линейный позиционно-чувствительный фотоприемник, электронный блок, вход которого подключен к входу линейного позиционно-чувствительного фотоприемника, вычислитель, вход которого подключен к выходу электронного блока, оси лазера и объектива пересекаются в точке, которая лежит в предметной плоскости объектива, оно снабжено последовательно установленными после лазера по ходу пучка его лучей телескопическим расширителем, управляемым пространственно-оптическим затвором и вторым объективом, цилиндрической линзой, установленной между первым объективом и линейным позиционно-чувствительным фотоприемником так, что ось ее цилиндрической поверхности перпендикулярна оси чувствительности линейного позиционно-чувствительного фотоприемника, ее предметная плоскость совмещена с плоскостью изображения первого объектива, плоскость ее изображения совмещена с чувствительной поверхностью линейного позиционно-чувствительного фотоприемника, блоком управления, вход которого подключен к выходу вычислителя, а выход ко входам управляемого пространственно-оптического затвора.
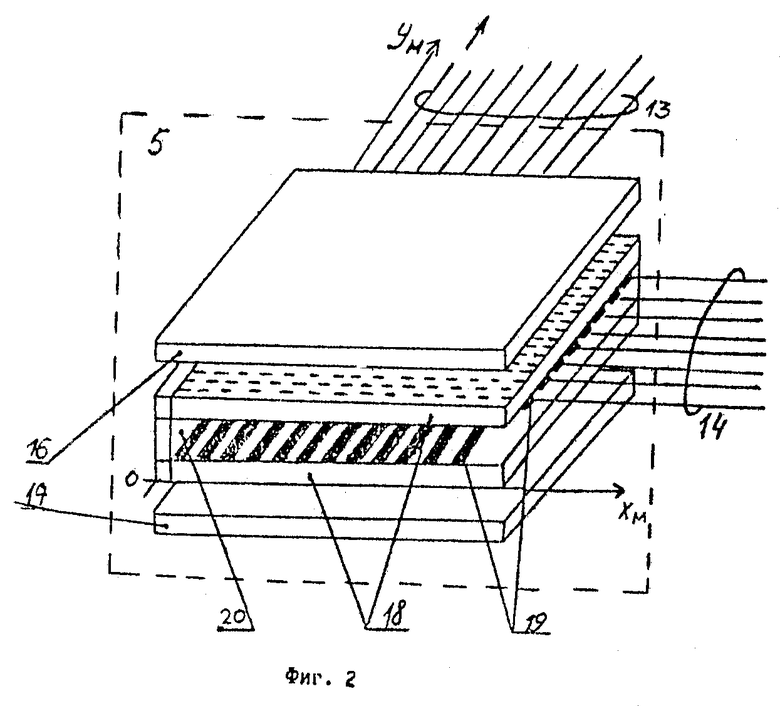
На фиг. 1 представлена функциональная схема устройства для определения координат поверхности объекта; на фиг.2 представлена конструкция управляемого пространственного оптического затвора.
Устройство содержит лазер 1, телескопический расширитель пучка 2, содержащий положительные линзы 3, 4, управляемый пространственный оптический затвор 5, проецирующий объектив 6, приемный объектив 7, фотоприемник 9, помещенный в фокус цилиндрической линзы 8, причем ее оптическая ось перпендикулярна оси фотоприемника. Вычислитель связан с оптическим затвором 5 через блок управления 12 с шинами 13, 14 управления и фотоприемником через электронный блок 10. Оптические оси расширителя пучка 2, проецирующего объектива 6 и приемного объектива 7 направлены на объект 15. Управляемый пространственный оптический затвор 5 выполнен в виде многослойной структуры (фиг.2) из линейных поляризаторов 16, 17, плоскости поляризации которых ориентированы под углом 90о друг к другу, стеклянных пластин 18 с прозрачными параллельными проводниками 19, образующими строки и столбцы, расположенные на поверхностях обращенных друг к другу пластин 18, между которыми помещен жидкий кристалл 20 (ЖК), плоскость поляризации которого совпадает с плоскостью поляризации поляризатора 16.
Управляемый пространственный оптический затвор предлагается выполнить в виде матричной многослойной структуры с количеством элементов равным N х M элементов (N строк, М столбцов). Управление такой матричной структуры осуществляется подачей импульсов управления по строкам и столбцам, причем, эффективное переключение оптических свойств ЖК имеет место на тех элементах, где падение напряжения достигает максимального значения. На неадресуемых элементах падение напряжения близко к нулю. Таким образом, учитывая работу пространственного оптического затвора, блок управления может быть реализован следующим образом (фиг.1). Коды столбцов и строк с вычислителя поступают на счетчик 21 и далее на дешифраторы 22, выходы которых соединены по шине 13 со столбцами, а по шине 14 через инверторы 23 со строками матричного оптического затвора.
В предлагаемом устройстве также может быть применен и другой вариант управляемого оптического затвора с индивидуальной адресацией ячеек. Каждая ячейка такого оптического затвора (клапана) имеет свой полупрозрачный управляемый электрод. Они все расположены на одной из сторон стеклянной пластины, а на противоположной стороне общий электрод.
Управление такого затвора осуществляется подачей позиционного кода на каждую ячейку через стандартный счетчики и дешифраторы. Может осуществляться управление как однополярными сигналами, так и двуполярными (импульсными).
В качестве вычислителя может быть применена любая стандартная ЭВМ, ЭВМ, состоящая из процессора 24 и стандартного параллельного интерфейса 25, соединяется с блоком 12 управления и электронным блоком 10 с помощью стандартного параллельного интерфейса 25.
Устройство работает следующим образом.
Лазер 1 через расширитель 2 пучка освещает управляемый пространственный оптический затвор 5. При прохождении оптического пучка через поляризатор 16 пучок поляризуется. В исходном состоянии, когда на шинах 13, 14 отсутствуют импульсы управления, световой пучок не проходит через поляризатор 17, так как его плоскость поляризации и плоскость поляризации прошедшего поляризованного пучка составляет 90о. При подаче управляющих импульсов по шинам 13, 14 от блока управления 12 на электроды 19 (на электрод-столбец и электрод-строку) пластин 18 происходит переориентация молекул жидкого кристалла на площадке пересечения электродов 19, и ЖК поворачивает (вращает) плоскость поляризации проходящего сквозь него оптического пучка на 90о (твист-эффект в нематическом ЖК), при этом плоскость поляризации этого пучка будет отличаться от плоскости поляризации поляризатора 17 на 0о или 180о, т.е. этот элементарный пучок света пройдет сквозь него. Таким образом, управляемый оптический затвор 5 формирует узкий оптический пучок из расширенного пучка, площадь сечения которого определяется площадью участка пересечения электродов 19 и формирующих световую марку на поверхности объекта 15. При переключении с блока 12 электродов 19 происходит дискретное сканирование поверхности объекта 15 световой маркой. Проецирующий объектив 6 служит для масштабирования, т.е. для выбора площади контроля. Если площадь ЖК матрицы равна требуемой площади контроля, тo объектив 6 не требуется.
Работа электронного блока заключается в том, что изображение световой марки через объектив 7 и цилиндрическую линзу 8 попадает на фоточувствительную строку фотоприемной линейки 9. Блок 10 формирует электрический аналог световой марки и формирует код, соответствующий координате центра световой марки на фотоприемнике. Сигнал с блока 10 подается на вычислитель 11, в которой по известным и записанным в памяти формулам
Yo K1.Yм,
Xo K1. Xм,
Zo K2.Zп, где К1 масштабирующий коэффициент проецирующего объектива 6;
Yм, Хм координата пучка управляемого оптического затвора;
Zп координата изображения световой марки на фотоприемнике;
К2 масштабирующий коэффициент объектива 7 и цилиндрической линзы 8 и предварительно выбранной плановой плоскости с координатами (X, Y, Z 0) вычисляются координаты точек Ао (Хо, Yo, Zo), принадлежащих поверхности измеряемого объекта 15. При выбранной системе координат ( Хм, Yм) оптического затвора 5 и плановой плоскости (Х, Y, Z 0) однозначно определяются две координаты (Хо, Yo) точек Ао, принадлежащих поверхности объекта, а фотоприемник позволяет найти третью недостающую координату Zo. Таким образом, по вычисленным в вычислителе 11 координатам точек Ао (Xo, Yo, Zo), принадлежащих поверхности объекта измерения восстанавливается реальный рельеф поверхности объекта 15.
Особенностью работы устройства является то, чтобы длительность свечения (прозрачности) одной ячейки оптического затвора 5 составляла несколько периодов опроса фотолинейки.
Технико-экономическая эффективность предлагаемого устройства заключается в следующем:
применение устройства позволяет сканировать объект дискретными узкими световыми марками за счет исключения дорогостоящего высокоточного быстродействующего механического привода для сканирования объекта измерения, и реализовать контроль 3-х координат поверхности при неподвижном объекте и устройстве;
расширение функциональных возможностей за счет гибкого произвольного изменения программы переключения ячеек оптического затвора, за счет этого еще возможно добиться еще большего повышения быстродействия;
расширение области применения и увеличить срок службы вследствие отсутствия движущихся механических узлов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2120106C1 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2050560C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2003 |
|
RU2260847C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 1983 |
|
SU1840998A1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| Автоколлимационное устройство | 1990 |
|
SU1727105A1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| Способ контроля прямолинейности и устройство для его осуществления | 1989 |
|
SU1739195A1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2015 |
|
RU2659720C1 |
Изобретение относится к измерительной технике и может быть использовано для бесконтактного измерения криволинейных поверхностей. Целью изобретения является повышение быстродействия за счет исключения механического сканирования. Управляемый пространственно оптический затвор 5 формирует из коллимированного пучка лучей узкий пучок лучей. По сигналам с выхода блока 12 управления управляемый пространственно - оптический затвор 5 осуществляет смещение в пространстве узкого пучка лучей, вследствие чего осуществляется дискретное сканирование поверхности контролируемого объекта 15, а затем вычислитель 11 рассчитывают профиль поверхности контролируемого объекта 15 по сигналам с выхода линейного позиционно чувствительного фотоприемника 9 и блока 12 управления. 2 ил.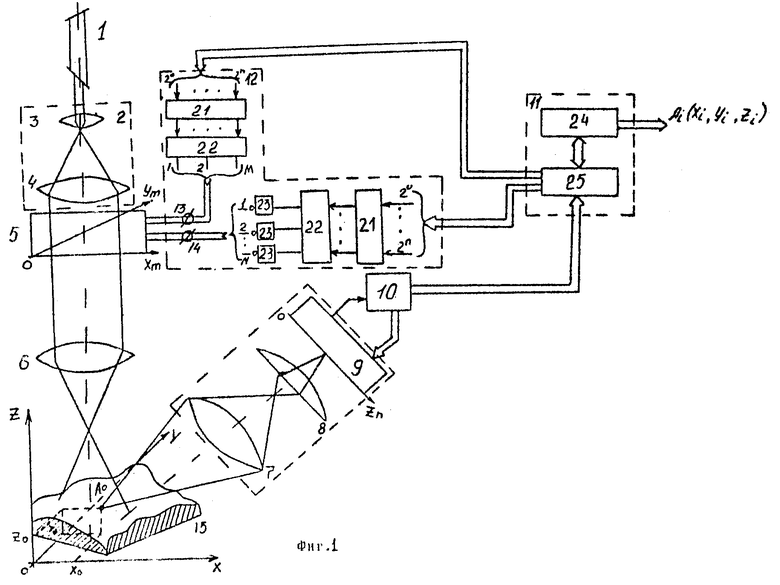
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОВЕРХНОСТИ ОБЪЕКТА, содержащее лазер, объектив, линейный позиционно-чувствительный фотопримник, электронный блок, вход которого подключен к выходу линейного позиционно-чувствительного фотоприемника, вычислитель, вход которого подключен к выходу электронного блока, оси лазера и объектива пересекаются в точке, которая лежит в предметной плоскости объектива, отличающееся тем, что, с целью повышения быстродействия, оно снабжено последовательно установленным после лазера по ходу пучка его лучей телескопическим расширителем, управляемым пространственно-оптическим затвором и вторым объективом, цилиндрической линзой, установленной между первым объективом и линейным позиционно-чувствительным фотоприемником так, что ось ее цилиндрической поверхности перпендикулярна оси чувствительности линейного позиционно-чувствительного фотоприемника, ее предметная плоскость совмещена с плоскостью изображения первого объектива, плоскость ее изображения совмещена с чувствительной поверхностью линейного позиционно-чувствительного фотоприемника, блоком управления, вход которого подключен к выходу вычислителя, а выход к входам управляемого пространственно-оптического затвора.
| СПОСОБ ТРИАНГУЛЯЦИОННЫХ ИЗМЕРЕНИЙ | 1987 |
|
SU1582796A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
