n-го якоря: ЕЛ BnA.-.. Обмотки якорей 1, 2, 3 включены согласно и напряжение на них подается одновременно. Под действием тяговых усилий якори 1, 2, 3, двигаясь через упоры 14-16, толкают III 13. При остановке любого из якорей Ш 13 продолжает движение. Тяговое усилие в момент трогания создается, в основном, первым ЭМ с минимальным РЗ Е. К моменту остановки
якоря 1 первого ЭМ после того как выбран РЗ Ei усилие второго ЭМ возрастает до величины, соответствующей сокращению РЗ от значения Ej-Ci, третьего от значения ЕЗ до f3-ti и т.д. п-го до la-Ej. Варьируя числом ЭМ, величинами РЗ Ей мощностью каждого из ЭМ, можно управлять тяговой характеристикой привода и приблизить ее к требуемой рабочей характеристике. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 2018 |
|
RU2707645C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕСС | 2015 |
|
RU2601727C1 |
| ИМПУЛЬСНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2015 |
|
RU2604356C1 |
| ЭЛЕКТРОМАГНИТНЫЙ УДАРНЫЙ ИНСТРУМЕНТ | 1995 |
|
RU2099175C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДАВЛЕНИЕМ СЖАТОГО ВОЗДУХА С РЕЗЕРВИРОВАНИЕМ ПО УПРАВЛЯЮЩЕМУ ВОЗДЕЙСТВИЮ | 2015 |
|
RU2662333C2 |
| Электромагнитный привод сжатия для стационарных контактных машин | 1989 |
|
SU1611639A1 |
| ЭЛЕКТРОМАГНИТ | 1998 |
|
RU2138091C1 |
| Электромагнитный пресс | 1979 |
|
SU844116A1 |
| Поляризованный электромагнит | 1981 |
|
SU1065895A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕСС | 1990 |
|
RU2025277C1 |
Изобретение относится к области геофизических исследований скважины и позволяет улучшить тяговую характеристику и повысить экономичность привода. Привод состоит из трех электромагнитов (ЭМ), содержащих якори 1, 2, 3, статоры 4, 5, 6, шток (Ш) 13, передаточный механизм 20, 21. Статоры жестко связаны между собой. Якори установлены на Ш 13, который выполнен с упорами 14-16 для фиксации якорей в положениях, обеспечиваюш.их соотношения между рабочими зазорами (РЗ) первого якоря, ,- второго якоря и т.д. 1 - (Л ГС О5 N3 О to 00
Изобретение относится к технике для геофизических исследований и может быть использовано в прижимных и коммутирующих механизмах скважинных приборов.
Цель изобретения - повышение экономичности и улучшение тяговой характеристики привода.
На фиг. 1 представлена конструктивная схема привода; на фиг. 2 - тяговые характеристики привода.
Привод (фиг. 1) содержит три электромагнита, включающие соответственно якори 1-3 и статоры, жестко связанные между собой и состоящие из магнитопроводов 4-6 со стопами 7-9 и обмоток 10-12, шток 13, снабженный упорами 14-16, ограничители 17-19, жестко связанные с соответствующими магнитопроводами 4-6, передаточный м.еханизм, состоящий из храповика 20 и собачки 21, связанной со щтоком 13 через ось 22, возвратную пружину 23. Шток 13 снабжен фланцем 24, который служит упором для возвратной пружины 23. Привод размещен в герметичном кожухе. Храповик 20 кинематически связан с пружинными или коммутирующими механизмами.
Привод работает следующим образом.
В исходном положении шток 13 удерживается возвратной пружиной 23; при этом якори 1-3 фиксируются с помощью упоров 14-16 и ограничителей 17-19 в положениях, обеспечивающих рабочий зазор первого i, второго Iz и третьего ЕЗ якорей, причем . Расстояние ЕЗ соответствует рабочему ходу собачки 21.
Обмотки 10-12 включают согласно и напряжение питания подают на все обмотки одновременно. Под действием тяговых усилий, создаваемых токами, проходящими через обмотки, ттори -3 начинают двигаться и через упоры 14-16 толкают щток 13 вместе с собачкой 21. Поскольку якори посажены на шток свободно, последний имеет возможность продолжать движение при остановке любого из якорей.
Так как , то сначала подойдет к стопу 7 якорь 1, затем к стопу 8 якорь 2, и к стопу 9 - якорь 3, при этом происходит сжатие возвратной пружины 23 и поворот храповика 20 на один зуб. Храповик 20 может быть связан через редуктор , кулачковый или рычажный механизм и т.п. с рабочим органом, осуществляющим конкретное действие - перемещение или прижатие датчиков к стенке скважины, коммутацию электрических цепей и др.
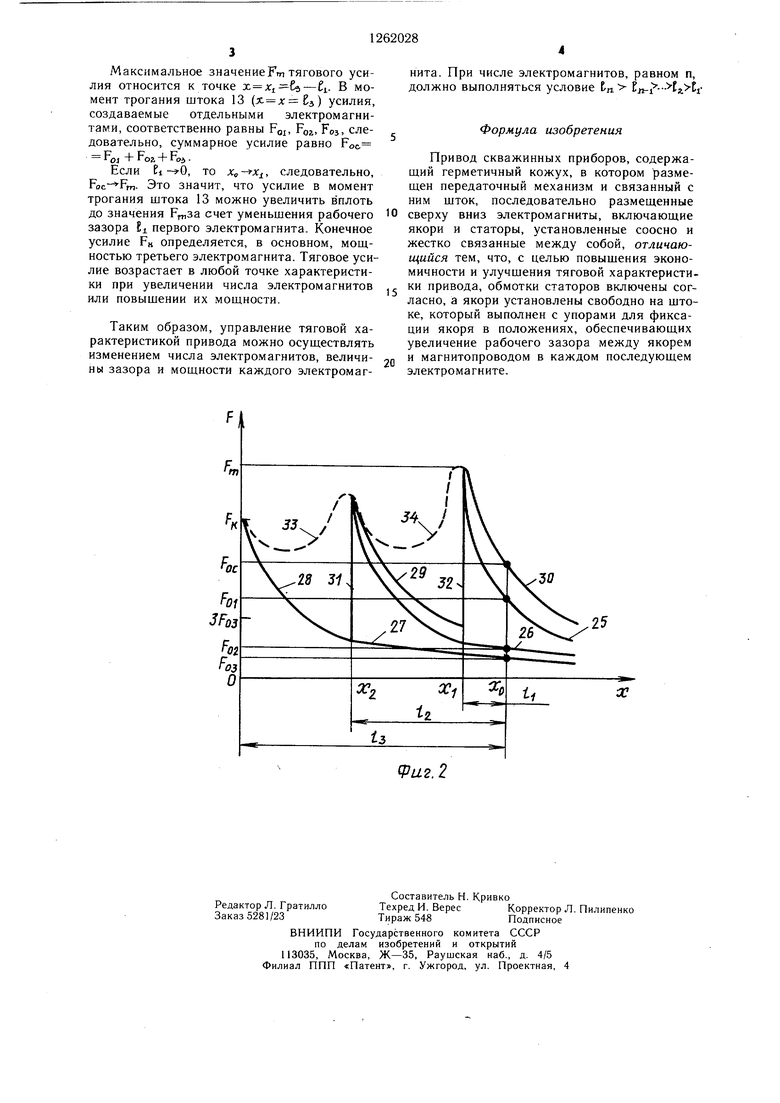
Тяговая характеристика привода, т.е. зависимость тягового усилия F от перемещения X штока 13, складывается из тяговых характеристик отдельных электромагнитов (фиг. 2).
Кривая 25 отражает тяговую характеристику первого электромагнита (рабочий зазор ti), кривая 26 - второго электромагнита (1г), кривая, включающая участки 27 и 28, - третьего электромагнита (з). Суммарная тяговая статическая характеристика 0 представлена криволинейными участками 28-30 и прямолинейными участками 31 и 32 параллельными оси OF.
Скачкообразное падение усилия в точках х х 1з-/1 и л: Х2 /з-/2 обусловлено
5 последовательной остановкой якорей 1 и 2, которые выбрали рабочие зазоры и заняли положение упора: якорь 1 - в стоп 7, якорь 2 - в стоп 8.
Кривые 28-32 отражают действие статических сил, обусловленных прохождением электрического тока через обмотки электромагнитов. Однако по мере набирания штоком 13 скорости возрастает кинетическая энергия привода, поэтому скачкообразного падения усилия, действующего на передаточ. ный механизм, не произойдет.
Участки 33 и 34 (показаны пунктиром) отражают частичное выравнивание тяговой характеристики за счет кинетической энергии, приобретенной приводом.
Таким образом, реальная тяговая харак0 теристика привода включает участки 33, 34 и 30. Максимальное значениеFm тягового усилия относится к точке x jCi-Cs-ti. В момент трогания штока 13 ( Ез) усилия, создаваемые отдельными электромагнитами, соответственно равны FQJ, FO, Foj, следовательно, суммарное усилие равно Foc FOJ + Foa + FOJ Если , то x,, следовательно, Это значит, что усилие в момент трогания штока 13 можно увеличить вплоть до значения счет уменьшения рабочего зазора i первого электромагнита. Конечное усилие FK определяется, в основном, мощностью третьего электромагнита. Тяговое усилие возрастает в любой точке характеристики при увеличении числа электромагнитов или повышении их мощности. Таким образом, управление тяговой характеристикой привода можно осуществлять изменением числа электромагнитов, величины зазора и мощности каждого электромагнита. При числе электромагнитов, равном п, должно выполняться условие tn. Формула изобретения Привод скважинных приборов, содержащий герметичный кожух, в котором размещен передаточный механизм и связанный с ним шток, последовательно размещенные сверху вниз электромагниты, включающие якори и статоры, установленные соосно и жестко связанные между собой, отличающийся тем, что, с целью повышения экономичности и улучшения тяговой характеристики привода, обмотки статоров включены согласно, а якори установлены свободно на штоке, который выполнен с упорами для фиксации якоря в положениях, обеспечивающих увеличение рабочего зазора между якорем и магнитопроводом в каждом последуюшем электрома гните.
| УСТРОЙСТВО ДЛЯ ПРИЖАТИЯ ГЕОФИЗИЧЕСКИХ ДАТЧИКОВ К СТЕНКЕ СКВАЖИНЫ | 1971 |
|
SU418600A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для прижатия геофизических датчиков к стенке скважины | 1975 |
|
SU600498A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Привод прижимного устройства скважинного прибора | 1977 |
|
SU699163A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
