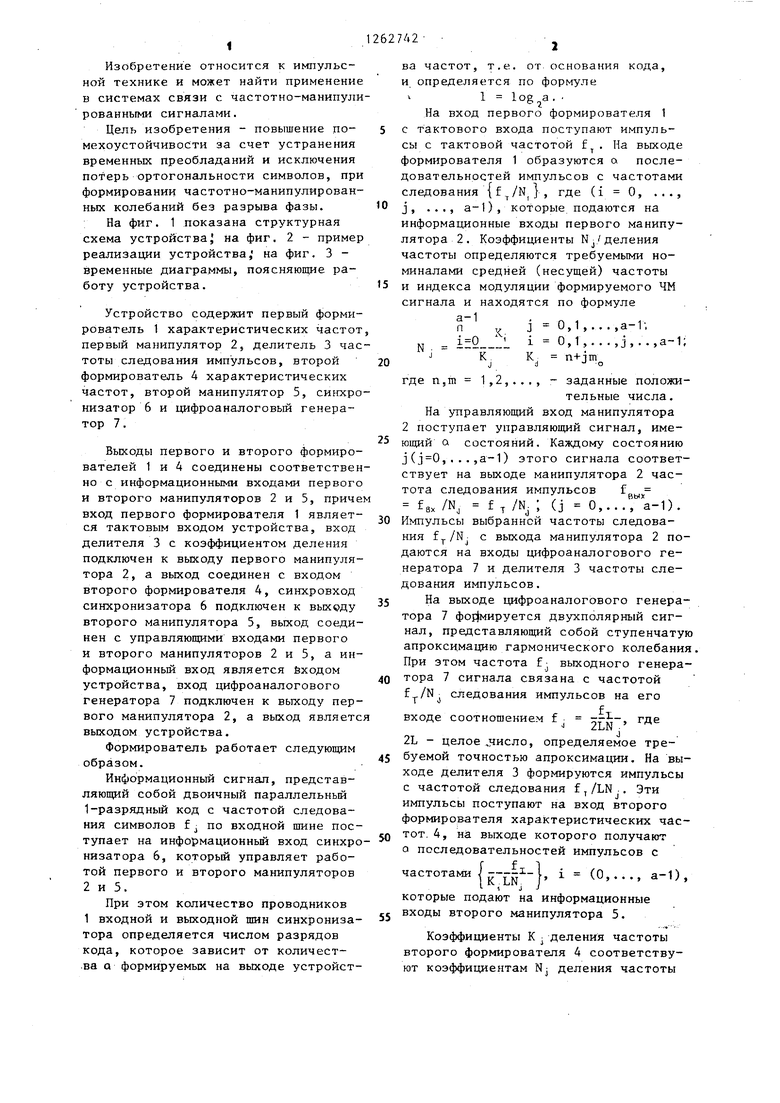
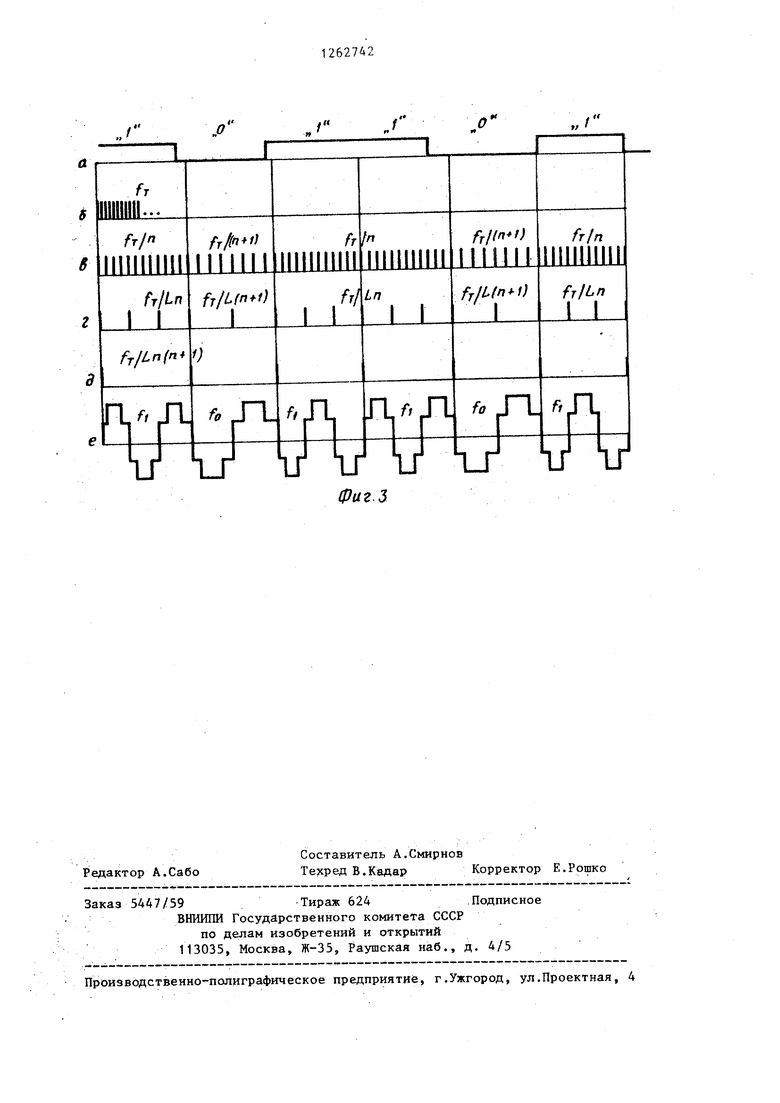
Изобретение относится к импульсной технике и может найти применение в системах связи с частотно-манипули рованными сигналами. Цель изобретения - повышение помехоустойчивости за счет устранения временных преобладаний и исключения потерь ортогональности символов, при формировании частотно-манипулированных колебаний без разрыва фазы. На фиг. 1 показана структурная схема устройстваi на фиг. 2 - пример реализации устройства, на фиг. 3 временные диаграммы, поясняющие работу устройства. Устройство содержит первый формирователь 1 характеристических частот первый манипулятор 2, делитель 3 час тоты следования импульсов, второй формирователь 4 характеристических частот, второй манипулятор 5, низатор 6 и цифроаналоговый генератор 7. Вьпсоды первого и второго формирователей 1 и 4 соединены соответствен но с информационными входами первого и второго манипуляторов 2 и 5, приче вход первого формирователя 1 является тактовым входом устройства, вход делителя 3 с коэффициентом деления подключен к выходу первого манипулятора 2) а выход соединен с входом второго формирователя 4, синхровход синхронизатора 6 подключен к выхрду второго манипулятора 5, выход соединен с управляющими входами первого и второго манипуляторов 2 и 5, а информационньш вход является йходом устройства, вход цифроаналогового генератора 7 подключен к выходу первого манипулятора 2, а выход являетс выходом устройства. Формирователь работает следующим образом. Информациоиньш сигнал, представляющий собой двоичный параллельный 1-разрядный код с частотой следования символов f J по входной шине поступает на информационньй вход синхро низатора 6, который управляет работой первого и второго манипуляторов 2 и 5. При этом количество проводников 1 входной и выходной шин синхронизатора определяется числом разрядов кода, которое зависит от количества а формируемых на выходе устройства частот, т.е. от основания кода, и определяется по формуле 1 . На вход первого формирователя 1 с тактового входа поступают импульсы с тактовой частотой f. На выходе формирователя 1 образуются а последовательностей импульсов с частотами следования , где (, ..., J, ..., а-1), которые подаются на информационные входы первого манипулятора 2 . Коэффициенты N /деления частоты определяются требуемыми номиналами средней (несущей) частоты и индекса модуляции формируемого ЧМ сигнала и находятся по формуле п ,, j 0,1а-1-, i- 0,1, ...,j,..,а-1; К. К n+jm J d -о где n,m 1,2,..., - заданные положительные числа. На управляющий вход манипулятора 2 поступает управляющий сигнал, имеющий а состояний. Каждому состоянию j(,. ..,а-1) этого сигнала соответствует на выходе манипулятора 2 частота следования импульсов f„, fg, /Nj f Т /Nj ; (j 0,..., а-1). Импульсы выбранной частоты следования f- /NJ с выхода манипулятора 2 подаются на входы цифроаналогового генератора 7 и делителя 3 частоты следования импульсов. На выходе цифроаналогового генератора 7 фо1::}мируется двухполярный сигнал, представляющий собой ступенчатую апрокси.мацию гармонического колебания. При этом частота f выходного генератора 7 сигнала связана с частотой следования импульсов на его входе соотношением f , где 2L - целое число, определяемое требуемой точностью апроксимации. На выходе делителя 3 формируются импульсы с частотой следования .. Эти импульсы поступают на вход второго формирователя характеристических частот. 4, на выходе которого получают Q последовательностей импульсов с {к-Щ-} i 0-. -1). частотами которые подают на информационные входы второго манипулятора 5. Коэффициенты К деления частоты второго формирователя 4 соответствуют коэффициентам NJ деления частоты первого формирователя 1 и определяются из условия а-1 K.N .Q К const, ,..,aНа управляющий вход манипулятора 5 поступает тот же управляющий сигнал, что и на управляющий вход мани пулятора 2. Каждому состоянию j(j О,а-1; этого сигнала соответст вует на выходе манипулятора 5 частота следования импульсов f f Благодаря соответствук K.LN. ющему выбору коэффициентов деления формирователей 1 и 4 частота следования импульсов на выходе манипулято ра 5 оказывается постоянной для всех а состояний входного информационного сигнала. Поэтому сигнал манипулятора 5 используется в качестве синхросигнала для управления синхронизатором 6. При этом символьная частота равна величине f 1. f ь.т а-1 „ L п , и остается .постоянной для заданных а-1 значений f , L, .- К -. В этом случае обеспечивается формирование ЧМ сигнала с постоянной длительностью символов Т 1/f const, что позволяет устранить вре менные преобладания в выходном сигнале. При формировании а- основного ЧМ сигнала - нерущая частота ся выражением а-1 „ f З-.П -Kj 2L а-1 -а, J... ( gi). 2L пЧ. а разность средних частот .г а.,) - jf--- --аНормализованный индекс модуляции при этом определяется выражением D uf.(j-H)-T §(. ) X J/L ) 1 X (ьПр , m 1,2,...), Так как величина m является целым числом, то обеспечивается формирование ЧМ сигнала с ортогональными символами. В результате обеспечивается повьшение помехоустойчивости формируемого ЧМ сигнала. Основные узлы устройства могут быть выполнены различным образом. Формирователи 1 и 4 характеристических частот могут состоять из а делителей частоты с коэффициентами деления соответственно N. J,. . ., К„, . .., ,.. ., К, ; Манипуляторы 2 и могут представлять собой мультиплексторы, число управляющих входов которьн равно 1 log а, а информационных входов - а . Синхронизатор 6 может состоять из 1 D-триггеров, на входы D которых по 1 проводникам поступает информационный входной сигнал, а на входы С-сигнал синхронизации с выхода манипулятора 5. На фиг. 2 представлен пример конкретного выполнения устройства для , , а на фиг. 3 - временные диаграммы, поясняющие его работу. На фиг. 2 показаны делитель 8 частоты импульсов. на (n+t), делитель 9 частоты импульсов на п, инвертор 10, элементы И 11 и 12, элемент ИЛИ 13, D-триггер 14, делитель 15 частоты импульсов на п, делитель 16 частоты импульсов на (п+1), инвертор 17, элементы И 18 и 19, элемент ИЛИ 20. Устройство работает следующим образом. Информационный сигнал (фиг. За), представляющий собой двоичный одноразрядньш код, поступает на вход D-триггера 14. Сигнал с выхода синхронизатора 6 управляет работой первого и второго манипуляторов 2 и 5. На вход первого формирователя 1 поступает сигнал тактовой частоты f . (фиг. 36). На выходах делителей 8 и 9 частоты формируются соответственно частоты (n-H) и f (фиг.Зв) , которые подаются соответственно на элементы И 11 и 12 первого манипулятора 2. При поступлении на управдлюпсий вход манипулятора 2 информационного сигнала положительной полярности открьтается элемент И 12 и с выхода элемента ИЛИ 13 поступают импульсы с частотой f . При пос туплении сигнала отрицательной поляр ности на выход манипулятора 2 через открытьш элемент И 11 поступают им J-I. пульсы с частотой f п+Г делителя 3 (фиг. Зг) подключен к входам делителя частоты 15 на п и 16 на (п+1) второго формирователя 4 В зависимости от частоты (n+1) Или на входе второго формирователя 4 и на выходе делителя 15 фор мируются частоты (n+1) или , а на выходе делителя 16 частоты (n+1) или () , которые подаются соответственно на элементы И 18 и 19. При поступлении информационного сигнала положительной полярности открывается элемент И 19 и с выхода элемента ИЛИ 20 поступают импульсы с частотой f /Ln(n-tтак как в этот момент времени на вход второго манипулятора 5 поступают импульсы с частотой . При отрицательной полярности входного информационного сигнала на выход вто рого манипулятора 5 также поступают импульсй с частотой (n+1), так как на- вход второго формирователя 4 поступают импульсы с частотой (n+1 Таким образом на синхровход триггера 14 синхронизатора 6 всегда поступают импульсы постоянной частоты {„ (фиг.Зд) . Поскольку коэф 5 LnV.n+1j фициент деления цифроаналогового генератора 7 выбран равным 2L, то на его выходе формируется сигнал часто 1/2Т. Таким образом, цифровой формирователь формирует частотно-манипулированньй сигнал с символами постоянной длительности и непрерывной фазой, что обеспечивает ортогональность символов и высокую помехоустойчивость. Формула изобретения Цифровой формирователь синусоидальньк колебаний переменной частоты, содержащий последовательно соединенные первый формирователь характеристических частот, первый манипулятор и цифроаналоговый генератор, выход которого является выходом устройства тактовым входом которого является вход первого формирователя характеристических частот, отличающийся тем, что, с целью повьшения помехоустойчивости, в него введены последовательно соединенные делитель частоты следования импульсов, второй формирователь характеристических частот, второй манипулятор и синхронизатор, второй вход которого является входом устройства, а выход подключен к управляющим входам второго .и первого манипуляторов, причем выход первого манипулятора соединен с входом делителя частоты следования импульсов.
фиг. 2
о
/
./
| название | год | авторы | номер документа |
|---|---|---|---|
| Формирователь частотно-манипулированных сигналов | 1983 |
|
SU1231623A1 |
| Цифровой генератор синусоидальных колебаний с двумя значениями частоты | 1985 |
|
SU1292165A1 |
| Устройство для формирования частотно-манипулированных сигналов | 1988 |
|
SU1598199A1 |
| Частотный манипулятор | 1982 |
|
SU1107322A2 |
| Цифровой формирователь сигналов с минимальной частотной манипуляцией | 2022 |
|
RU2794215C1 |
| Широкополосная система связи с фазоманипулированными сигналами | 1986 |
|
SU1324120A1 |
| МОДУЛЯЦИОННАЯ СХЕМА НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2401515C1 |
| Способ тактовой синхронизации приемника двоичного частотно-модулированного сигнала и устройство для его осуществления | 1980 |
|
SU1361727A1 |
| СПОСОБ ПЕРЕДАЧИ МНОГОМЕРНОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ СЛОВНОЙ СИНХРОНИЗАЦИИ МАЖОРИТАРНО УПЛОТНЕННЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2262206C1 |
| Устройство для передачи информации с частотной манипуляцией | 1984 |
|
SU1218490A2 |
Изобретение может быть использовано в системах связи с частотно-манипулированными сигналами. Цель изоб ретения - повышение помехоустойчивости устройства. Формирователь содержит формирователь 1 характеристических частот, манипулятор 1 и цифроаналоговый генератор 7. Введение в устройство делителя 3 частоты следования импульсов, формирователя 4 характеристических частот манипулятора 5, синхронизатора 6 и соединение их с элементами устройства позволяют устранить временные преобладания и исключить потери ортогональности символов при формировании частотно-манипулированных колебаний без разрыва фазы. 3 ил. с S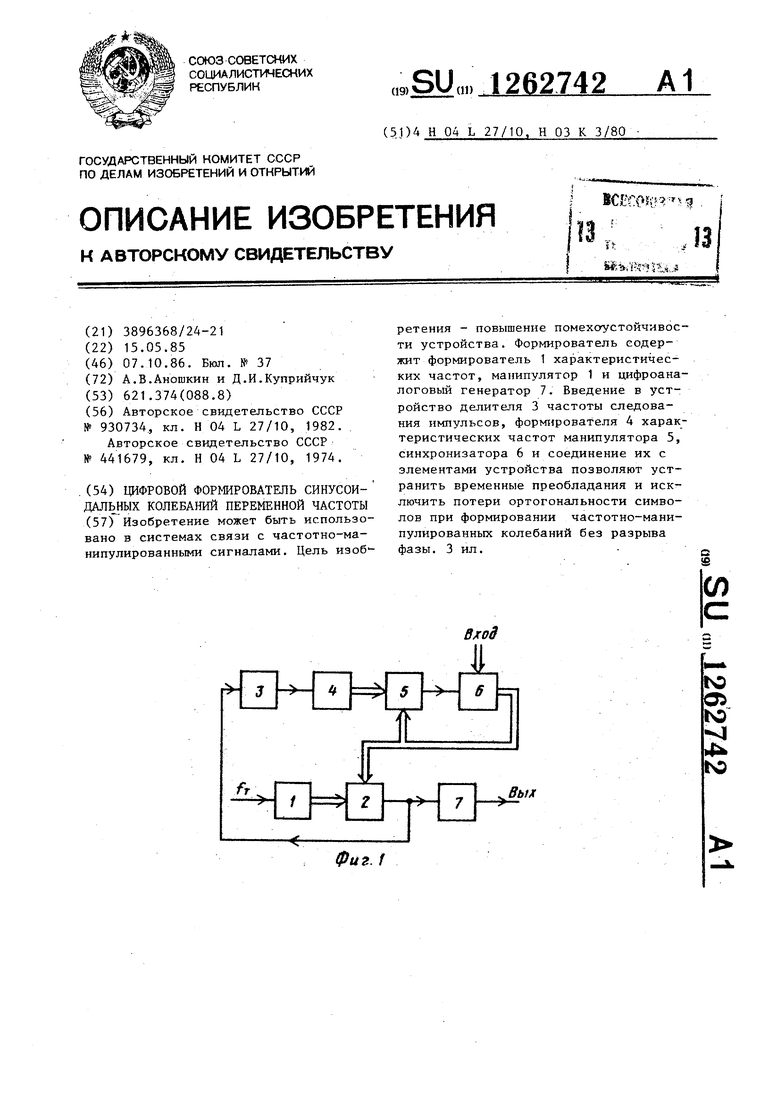
frjn
fr/in il
iiiiiiiiiii
iiiiiiiiiii
iliilll
fr/Ln
fjjLfn i)
I I
I
fr/Lnfnt
fr/n
iliUli
fr/l-fn l)
1 I
I
I
| Цифровой частотный манипулятор | 1980 |
|
SU930734A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Частотный манипулятор | 1972 |
|
SU441679A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
