Изобретение относится к измерению электромагнитного момента косвенным образом компенсированных электрических машин постоянного и пульсирующего тока, в частности к измерению сил тяги и электрического торможения подвижного состава с компенсированными тяговыми электрическими машинами постоя нного и пульсирующего тока и может быть использовано в системах автоматического управления для плавного регулирования электромагнитного момента электрических машин общепромьшшенного привода, а также для регулирования сил тяги и электрического торможения подвижного состава.
Цель изобретения - повьш1ение точности.
На чертеже представлена функциональная блок-схема предложенного устройства.
; Устройство для измерения тормоз iofi силы электроподвижного состава содержит датчик 1 тока якоря и дат.чик 2 тока обмотки возбуждения тягового электродвигателя, подключенный к входу функционального преобразователя 3, вьгход которого соединен с одним из входов блока 4 сравнения, другой вход которого подключен к выходу формирователя 5 сигнала обратной связи, а вьпсод - к входу интегратора 6, соединенного выходом с одним их входов блока 7 сравнения, другой вход которого подключен к выходу генератора 8 пилообразного напряжения, а выход - к входу нуль-органа 9, входы которого соединены соответственно с входом формирователя 5 сигнала обратной связи и одному из входов коммутатора 10, другой вход которого соединен с выходом датчика 1 тока якоря.
Рассмотрим упрощенный режим включения, позволяющий лучшим образом представить принцип действия устройства. При этом, считаем, что напряжение 11 выхода функционального преобразователя 3 уже в первый момен равно установивщемуся значению. Фактически процесс включения устройства носит более Сложный характер, так kaK он сопровождается ростом напряжения с выхода функционального преобразователя 3 по сложной зависимости от времени, определяемой инерционностью цепи обмотки возбуждения тяговой машины.
В рассматриваемом условном режиме включения устройства в начале процесса напряжение U с выхода интегратора 6 равно нулю. Также равно нулю напряжение Иц с выхода нуль-органа 9 и напряжение Ugj с выхода формирователй 5 сигнала обратной связи.
При подаче на вход интегратора 6 напряжения Уфп через блок 4 сравнения, на его выходе начинается рОст напряжения (j , , Темп роста этого напряжения определяется постоянной времени интегратора 6 и уровнем напряжения Urt,,, с выхода функционального преобразователя 3.
Рост напряжения U происходит до
5 момента, когда оно становится больше напряжения Ur выхода генератора 8 напряжения пилообразной формы, т.е. когда разность напряжений Df . вычисляемая в блоке 7 сравнения, ста0 новится отрицательной. В этот момент происходит квантование выходного напряжения нуль-органа 9 и оно становится положительным. При этом, на выходе формирователя 5 сигнала обрат5 ной связи появляется отрицательное напряжение Uoc величина которого постоянна. Причем уровень этого напряжения должен превышать наибольшее возможное значение напряжения . В
0 результате ко входу интегратора 6 прикладывается напряжение 1)фп - Uj, которое имеет отрицательное значение. Напряжение на выходе интегратора 6 начинает уменьшаться. Этот процесс заканчивается в момент, когда разность
напряжений U н становится положительной. При этом, происходит квантование напряжения выхода нульоргана 9. Оно становится равным нулю. Становится равным нулю и напряжение UQC выхода формирователя 5. Поэтому напряжение на выходе интегратора 6 вновь начинает расти под действием напряжения j постоянно поданного на вход интегратора 6. Причем рост напряжения U ц происходит уже не от нуля, а от некоторого положительного значения. При периодическом повторении описанного процесса постоянно увеличивается длительность подачи на блок А сравнения импульса отрицательного напряжения 0,, и, следовательно, замедляется рост напряжения и ц на выходе интегратора 6.
Описанный процесс изменения напряжения на выходе интегратора 6 заканчивается при равенстве нулю на его входе вольтсекундной площади напряжеНИИ ифп и ос за период следования напряжения пилообразной формы. В этом случае для квазиустановившегося процесса можно записать следующее выражение tuт (1) о . tj откуда Т - период следования напряж ния; t/i - длительность импульса. Если в квазиустановившемся режиме работы устройства при неизменной величине напряжения и (р„ произошло изменение-скважности напряжения UMO , например , вследствие изменения параметров генератора 8, то это приводит к нарушению равенства (1), что вызывает изменение напряжения на выходе интегратора. Последнее приводит к восстановлению равенства (1). Причем скважность импульсов на выходе нульоргана 9 становится прежней. Этим объясняется высокая стабильность характеристики устройства. Импульсы с выхода нуль-органа 9 поступают на вход коммутатора 10 (вход управления). На другой вход ком мутатора 10 подано напряжение Uo , пропорциональное действительному зна чению тока якоря тяговой машины. При наличии импульса напряжения Lf о на входе коммутатора 10, коммутатор открьшается и напряжение U, проходит через него без преобразования по ампли туде. При отсутствии импульса напряж ния U , коммутатор to закрыт и напряжение U через него не проходит, аким образом, на выходе коммутатора 10 имеют место импульсы напряжения, длительность которых равна ty , а их амплитуда - напряжению Цц , т.е. импульсы на выходе коммутатора имеют вольтсекундную площадь, равную 5utu-U«, или, подставляя вместо ty выражение (2), получим 5u Среднее значение напряжения на выходе коммутатора 10 определяется по чгледутацей формуле .dt.lu.l,. (5) Из формулы (5) видно, что среднее значение напряжения на выходе коммутатора 10 пропорционально току якоря и потоку возбуждения злектрической машины, т.е. пропорционально ее электромагнитному вращающему или тормозному моменту. Из формулы (5) видно также, что для достижения высокой стабильности характеристики решающего устрюйства, достаточно обеспечить постоянство амплитуда напряжения Ц на выходе формирователя 5 сигнала обратной связи. Напряжение выхода решающего устройства не зависит от нелинейности и изменения амплитуды напряжения пилообразной формы, чем достигается высокая точность вычисления электромагнитного момента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вентильным преобразователем | 1982 |
|
SU1064419A1 |
| Способ управления двухфазным вентильным преобразователем | 1984 |
|
SU1231567A1 |
| Устройство для управления вентильным преобразователем | 1977 |
|
SU748780A1 |
| Устройство для регулирования угла запаса ведомого сетью инвертора | 1983 |
|
SU1270852A1 |
| Устройство для импульсного регулирования напряжения на тяговом электродвигателе постоянного тока | 1977 |
|
SU745729A1 |
| Устройство для безнагрузочной настройки регулятора возбуждения тягового генератора | 1983 |
|
SU1126467A1 |
| Устройство для управления преобразователем | 1980 |
|
SU892650A1 |
| Электропривод постоянного тока | 1984 |
|
SU1226600A1 |
| Способ импульсной стабилизации постоянного напряжения и устройство для его осуществления | 1982 |
|
SU1120304A1 |
| Вентильный электродвигатель | 1984 |
|
SU1259461A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОРМОЗНОЙ СИПЫ ЭЛЕКТРОПОДВШШОГО СОСТАВА, содержащее датчики тока якоря и обмотки возбуждения тягового электродвигателя, последний из которых подключен выходом к входу функционального преобразователя, первый блок сравнения и коммутатор, отличающееся тем, что, с целью повьшения точности, оно снабжено интегратором, нуль-органом, формирователем сигнала обратной связи, генератором пилообразного напряжения и вторым блоком сравнения, первый вход которого соединен с выходом функционального преобразователя, второй - с формирователем сигнала обратной связи, а выход - с входом интегратора, выход которого подключен к первому входу первого блока сравнения, соединенного вторым входом с выходом генератока пилообразного напряжения, а выходом - с входом нуль-органа, один выход которого соединен с входом с € формирователя сигнала обратной связи, а другой - с одним из входов комму(Л татора, другой вход которого подключен к выходу датчика тока якоря тягового электродвигателя.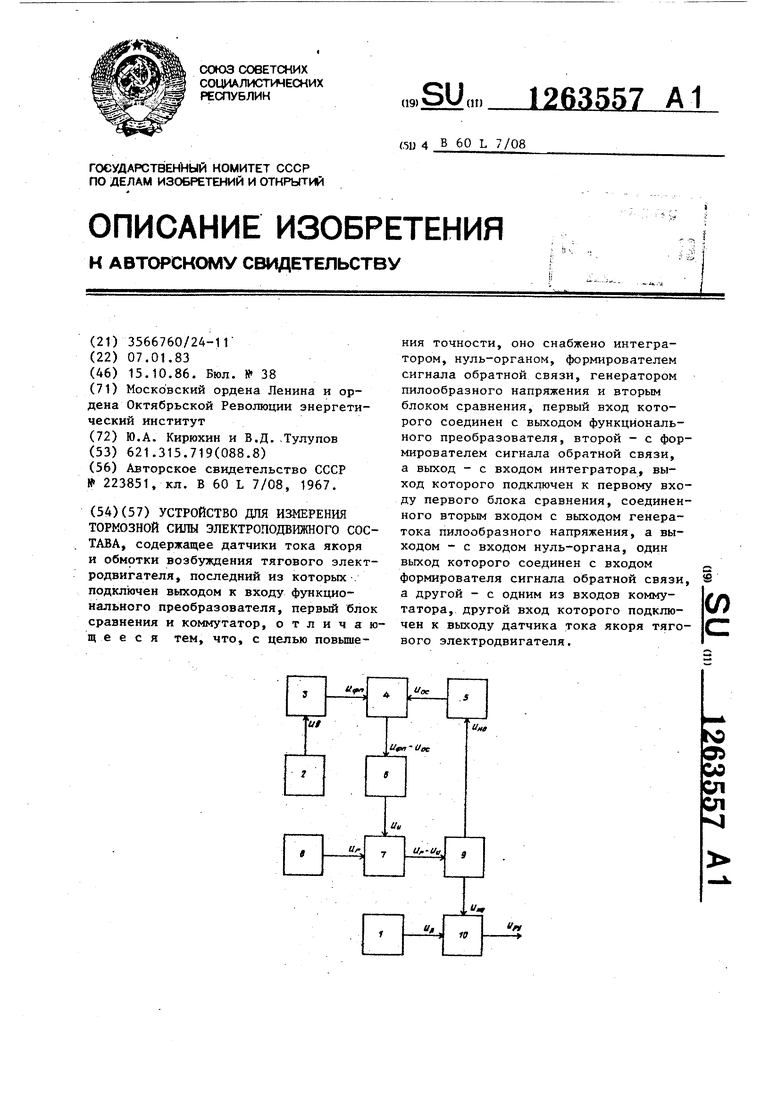
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА ПОСТОЯННОГО ТОКА | 1967 |
|
SU223851A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
