положение о Магниты 13 наводят ЭДС в катушках индукционного датчика 14, пропорциональную скорости перемещения груза 5, Этот сигнал действует на маятник таким образом, что скорость перемещения груза 5 гасится, Ивдукционный датчик вместе с грузом 5 размещены на конце гибкого стержня 4, частота собственных изгибных колебаний которого совпадает с частотой собственных колебаний свободного конца штока 2. Для этого длина и изгибная жесткость стержня должны удовлетворять соотношению, приведенному в описании, В этом случае демпфирующая цепь следящей системы гасит
не только колебания подвижной части как целого, так и кзгибные колебания свободных концов стержня 4 и штока 2,. а чувствительность следящей системы может быть увеличена без нарушения ее устойчивости. Расположение фотодатчика 19 за пределами камеры установки исключает влияние на него условий внутри камеры. Горизонтальные опорные иглы 9 уменьшают величину случайных смещений подвижной части весов на опорах, а также удерживают ее при сняснятии штока 2 с образцом 1, уменьшая износ поверхностей опор и устраняют необходимость в системе арретирования весов. 1 з.п. ф-лы, 1 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения магнитной восприимчивости | 1977 |
|
SU711511A1 |
| Устройство для испытания образца на электростатическую зарядку | 1981 |
|
SU996958A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ОБЪЕКТА | 1993 |
|
RU2075732C1 |
| Датчик наклона и вибрации | 2019 |
|
RU2707583C1 |
| УСТАНОВКА ДЛЯ ИЗУЧЕНИЯ ВНУТРЕННЕГО ТРЕНИЯ В МЕТАЛЛАХ И СПЛАВАХ | 1971 |
|
SU313143A1 |
| ВИБРОНАСОС | 1993 |
|
RU2066794C1 |
| Активная виброизолирующая платформа на основе магнитореологических эластомеров | 2015 |
|
RU2611691C1 |
| Маятниковый инклинометр для определения углов наклона в двух взаимоперпендикулярных плоскостях | 1974 |
|
SU617025A3 |
| Испытательный стенд | 1988 |
|
SU1583849A1 |
| Динамический испытательный стенд | 1983 |
|
SU1117535A1 |
Изобретение относится к технике измерения магнитной восприимчивости и предназначено для исследования ела- бомагнитных и феррома гнитных веществ. Цель изобретения - повьшение точности измерения при высокихтемпературах. Воздействующее на образец 1 магнитное поле изменяет положение маятника. При этом зеркало 21, отклоняя луч осветителя 20, меняет освещенность фотодатчика 19. Сигнал разбаланса через усилитель 16 и регистрирующий прибор 17 подается на соленоиды i 18 и возвращает маятник в исходное СЛ 05 сл сд со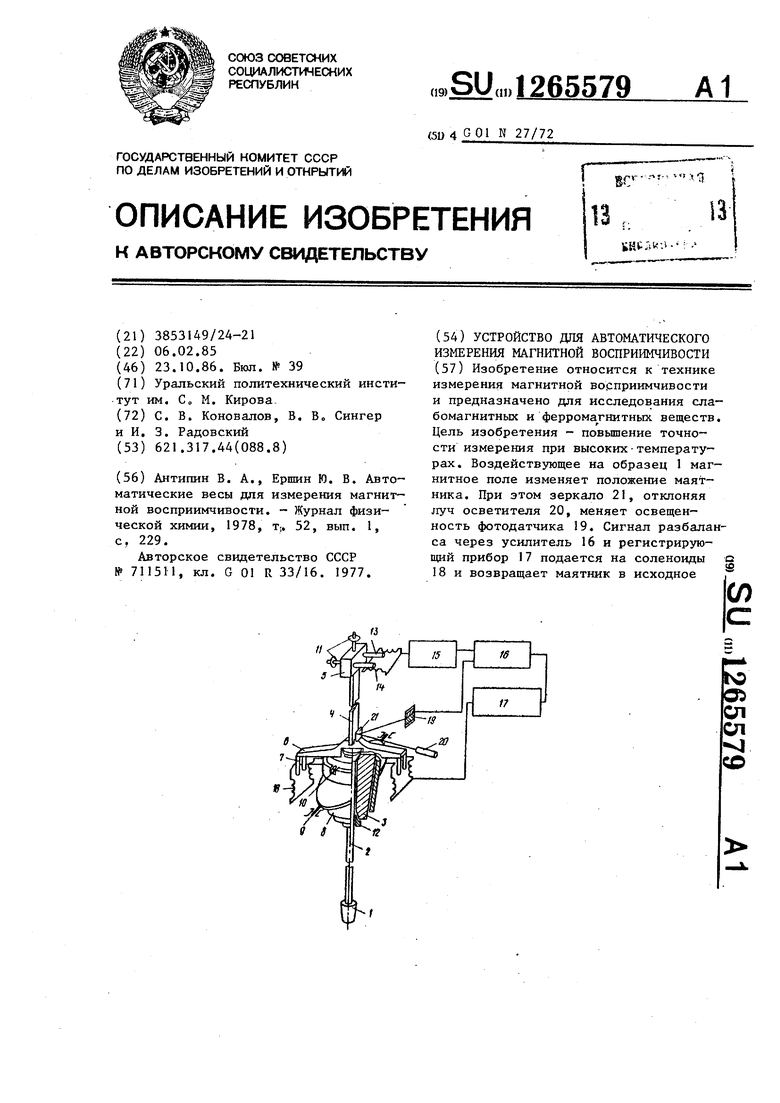
1
Изобретение относится к технике измерения магнитной восприимчивости, предназначенной для исследованзля лабомагнитных и ферромагнитных веществ при высоких температурах.
Целью изобретения является повьш1е ние точности измерений при высоких температурах,
В данной конструкции весов индукционный датчик вместе с балансировочным грузом размещены на конце гибкого стержня, частота собственных изгибных колебаний которого совпадает с частотой собственных колебаний свободного конца штока. Для этого длина и изгибная жесткость стержня должны удовлетворять приведенному выше соотношению которое получено на основании приближенного математического решения задачи о наименьшей частоте собственных изгибных колебаний стержня, жестко закрепленного одним концом и имеющего сосредоточенную массу на другом конце. В этом случае демпфирующая цепь следящей системы гаскт не только колебания подвижной части как целого, но и изгибные . колебания свобод ных концов стержня и штока, а чувствительность самой следящей системы может быть увеличена без нарушения ее устойчивости. Демпфирование весов с помощью независимого индукционного датчика позволяет применить в качестве датчиков положения подвижной части датчики с меньшим быстродействием по сравнению с емкостными, например фотодатчики. При использовании фотодатчнков следящей системой может служить усилитель постоянного тока, а сами датчики установлены за пределами камеры установки, что исключает влияние на них температуры среды в камере
Точность весов зависит также от устойчивости их подвижной части на опорах. Ограниченная жесткость штока и высокий коэффициент чувствительности следящей системы обусловливают заметную вибрацию подвижной части в период установления рабочего режима устройства Для горизонтальных игл величина случайных смещений на опорах меньше, чем для вертикальных это используется во многих приборах для улучшения центровки подвижных частей В предлагаемом устройстве такое преимущество горизонтального расположения игл дополняется тем, что зо время работы следящей системы углы поворота подвижной части очень малы и относительное скольжение опорных поверхностей отсутствует, т.е. в опорах имеется лишь трение качения как и при вертикальном расположении игл.
Кроме того, горизонтальные иглы удерживают подвижную часть весов при снятии (установке) штока с образцом. что повышает удобство эксплуатации и уменьшает износ соприкасающихся поверхностей игл и опор. На чертеже приведены блок-схема следящей системы и обпщй вид подвиж ной части предлагаемого устройства частичным вьфезом втулки и посадочн го конуса для лучшего показа конструкции. Устройство для автоматического измерения восприимчивости включает маятниковые весы и следящ ю систему Исследуемый образец 1 закреплен на съемном маятнике весов, состоящем и кварцевого штока 2 с тугоплавким на конечником общей длиной 0,5 м, посадочного конуса 3 и гибкого стержня 4 из немагнитной стали длиной 0,12 м с балансировочным грузом 5 на конце Для управления положением маятника на конусе 3 укреплено коромысло 6 с магнитами 7 силовой обратной связи Маятник удерживается конической втул кой 8, установленной на горизонтальных опорных иглах 9. Штифт 10 в конусе 3 определяет его положение во втулке 8. Для тонкой балансировки весов служат грузы I1. Шток 2 соединен с конусом 3 с возможностью поворота и фиксируется гайкой 12. Стержень 4 -жестко соединен с конусом 3, а его изгибная жесткость подобрана в соответствии с приведенньм соотношением. Магниты 13 индукционного дат чика расположены на балансировочном грузе 5. Следящая система устройства содержит индукционный датчик 14, фильтр 15 низкой частоты, усилитель 16постоянного тока, регистрирунлций прибор 17, соленоиды 18 обратной связи, дифференциальный фотодатчик 19 и осветитель 20, луч которого отражается зеркалом 21, расположенным на коромысле 6 маятника. Магнитное поле, действуя на образец 1, изменяет положение маятника, тогда зеркало 21, отклоняя луч осветителя 20, меняет освещенность фотодатчика 19. Сигнал разбаланса через усилитель 16 и регистрируюпр й прибор 17подается на соленоиды 18 и возвращает маятник в заданное положение При этом магниты 13 наводят в катушках индукционного датчика 14 ЭДС, пропорциональную скорости перемещения груза 5о Этот сигнал, после филь тра 15, усиленный демпфирующей цепью усилителя 16, действует на маятник 794 таким образом, что скорость перемещения груза 5 гасится. Так как жесткость стержня 4 обеспечивает равенство частот изгибных колебаний обоих концов маятника, то при этом гасится и скорость перемещения конца штока 2. Фильтр 15 низкой частоты препятствует возбуждению следящей системы на звуковых частотах, а груз 5 обеспечивает избирательность индукционного датчика 14 к наинизшей частоте колебаний маятника. Сзщественное изменение жесткости стержня 4 или расположения магнитов 13 относительно рекомендованных приводит к необходимости уменьшения коэффициента чувствительности следящей системы вследствие ее возбуждения. В связи с гашением изгибных колебаний штока, нарушаюш;их устойчивость следящей системы, ее коэффициент чувствительности может быть увеличен, , причем демпфирование весов с йомощью независимого индукционного датчика позволяет использовать фотодатчик и в качестве датчика положения маятника и, расположив его за пределами камеры установки, исключить влияние на него условий внутри камеры при высокотемпературных измерениях. В этом случае следящая система может иметь более простое устройство, представляющее собой усилитель постоянного тока. Горизонтальные опорные иглы уменьшают величину случайных смещений подвижной части весов на опорах, а также удерживают ее при снятии штока с образцом, уменьшая износ поверхностей опор и устраняет необходимость в системе арретирования весов. Формула изобретения 1. Устройство для автоматического измерения магнитной восприимчивости, содержащее весы с коромыслом, коническое гнездо, съемный упругий шток с посадочным корпусом и следящую систему, отличающееся тем, что, с целью повьш1ения точности измерений при высоких температурах, устройство снабжено гибким стержнем, присоединенным к посадочному конусу съемного штока и балансировочным грузом, расположенным на свободном конце стержня, причем длина и изгибная жест$1265579
кость стержня связаны с длиной и из-ня и шгока соответственгибной жесткостью .штока соотношениемно,
. 2 а опорныеиглы подвижной части весов
Lfc X ( -о ) расположены горизонтально. LJ;,/ Мщ + 8 , + 17 га / Е,1ц, 5 2. Устройство по п. 1, о т л игде LP , L - дпины стержня .и штокачающееся тем, что, следящая
соответственно;система включает соленоиды, индукциМ , М - массы стержня и штокаонньй датчик скорости перемещения
соответственно;груза, фотодатчик, фильтр, усилитель m - массы грузов, сосредо-О постоянного тока и измерительный приточенных на концахбор, причем фильтр соединен с индукстержня и штока соот-ционным датчиком, выход фильтра соеветственно;динен с входом усилителя, выход коEg, Ец, - модули упругости матери- торого соединен с входом измерительалов стержня и штока;5 ного прибора, выход которого соединен
1,1 - центральные моментыс соленоидами, а индукционный датчик
инерции плоскостей по-скорости перемещения груза размещен
перечных сечений стерж-на свободном конце гибкого стержня.
| Антипин В | |||
| А., Ершин Ю | |||
| В | |||
| Автоматические весы для измерения магнитной восприимчивости | |||
| - Журнал физической химии, 1978, Tj | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения магнитной восприимчивости | 1977 |
|
SU711511A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
