2, Стенд ПОП.1, отличающийся тем, что линейные размеры коромысел, шатуна и стержня в каждом четырехзвенном механизме по отношению к линейному размеру неподвижного звена выполнены равными 0,517, 0,555, 0,972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический испытательный стенд | 1985 |
|
SU1303946A1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| Калибрационный вибростенд | 1979 |
|
SU815639A1 |
| Стенд для испытания изделий на воздействие ускорений | 1990 |
|
SU1789937A1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ АППАРАТУРЫ | 2019 |
|
RU2717358C1 |
| Стенд испытательный | 1982 |
|
SU1024856A1 |
| СПОСОБ ЗАДАНИЯ ВИБРОУДАРОВ | 2014 |
|
RU2583854C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
1. ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД, содержащий основание, платформу, связанную с маятником, и регулировочный груз, отличающийся тем, что, с целью увеличения точности калибровки аппаратуры, он снабжен гироскопом, датчиком момента, двумя дополнительными регулировочными грузами, следящей системой, состоящей из датчика положения платформы,блока сравнения, задающего генератора и усилителя, при этом маятник выполнен в виде четырех шарнирно соединенных с платформой стержней, каждый из которых жестко связан с шатуном шарнирного четырехзвенного механизма, укрепленного на стойках основания, гироскоп установлен на шатуне одного из четырехзвенных механизмов, а регулировочные грузы на стержнях, связанных с шатунами остальных четырехзвенных механизмов, g датчик момента закреплен на наруж- (Л ной рамке гироскопа и соединен с датчиком положения через усилитель и блок сравнения, второй вход которого подключен к задающему генератоРУ. -vl сд W сд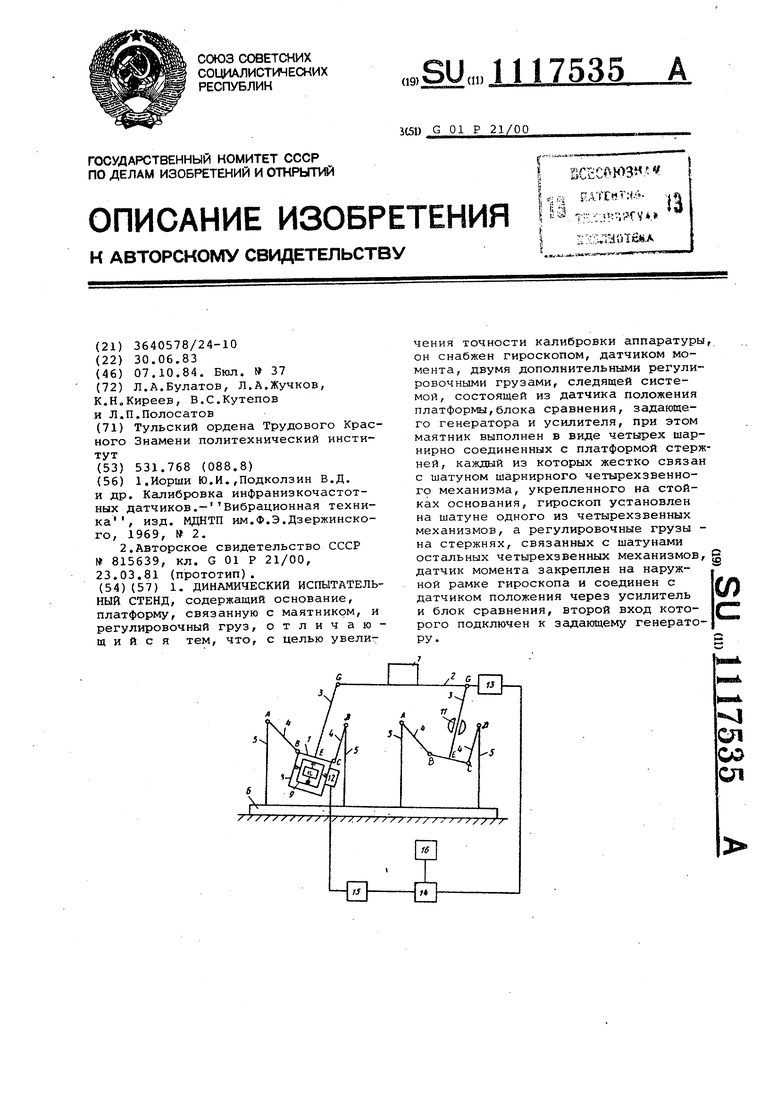
Изобретение относится к испытательной технике и может быть использовано для нспытания гравиинерционной аппаратуры (акселерометрической гравиметрической и т.п.), работающей на подвижном основании.
Известен калибрационный вибростенд, содержащий маятник и. кинематически, связанную с ним платформу для крепления испытываемого прибора tl.
Однако в этом вибростенде для iполучения синусоидальных колебаний платформы ее связь с подвесом маятника осуществлена фрикционной передачей посредством .кулачков.заданного профиля, что существенно усложняет конструкции стенда. Регулировка собственной частоты колебаний, маятника осуществл.яется сменными пружинами различной жесткости. Использование сменных пружин не позволяет производить регулировки собственной частоты колебаний маятника.
Известен также калибрационный вибростенд, содержащий основание, платформу, связанную с маятником, и регулировочный груз C2j.
Однако известный стенд не позволяет испытывать аппаратуру, работающую на подвижном основании и испытывающую инерционные возмущения с периодами больше 3 с и амплитудой ускорений до 100 Гал, как это имеет место на подвижных объектах. При таких возмущениях амплитуда колебаний достигает 1-1,5 м, а амплитуда колебаний платформы на известном стенде при длине подвеса маятника 2,5 м составляет 0,2 м при периоде 3 с, Тов. для получения амплитуды порядка 1,5 м длина маятника увеличивается до 19 м, что не позволяет осуществлять такой стенд конструктивно. К недостаткам стенда относится невозможность осуществления чисто синусоидальных колебаний платформы, так как колебания, возбуждаемые маяткиком, быстро затухают (удается наблюдать только 10-15 полных колебания), в силу нелинейности колебаний маятника происходит искажение синусоидального закона на 4-5%, передаточный кулисный механизм искажает синусоидальный закон движения еще на . Кроме того, происходит искажение синусоидального закона при движении платформы-тележки по направляющим на 2-3%.
Цель изобретения - увеличение точности калибровки аппаратуры, работаЕощей на подвижном основании и подвергаемой инерционным возмущениям с периодами 3-100 с и амплитудой колебаний до 1,5 м при ускорениях, достигающих tOO Гал.
Указанная цель достигается тем, что динамический испытательный стенд содержащий ос.нование, платформу, связанную с маятником, и регулировочный груз, снабжен гироскопом, датчиком момента, двумя дополнительными регулировочньши грузами., следя- . щей системой, состоящей из датчика положения пл.атформы, бяока сравнения задающего генератора и усилителя,. при. этом маятник выполнен в виде четырех шарнирно соединенных с платформой стержней, каждый йз которых жестко связан с шатуном шарнирного четырехзвенного механизма, укрепленного на стойках основания, гироскоп установлен на шатуне одного из четырехз венных механизмов, а регулировочные грузы - на стержнях, связанных с шатунами остальных четырехзвенных механизмов, датчик момента закреплен на .наружной.рамке гироскопа и соединен.с датчиком положения, через усилитель и блок сравнения, второй вход которого Подключен к задающему генератору.
Причем линейные размеры коромысел, шатуна и стержня в каждом четырехзвенном механизме по отношению к линейномл- размеру неподвижного звена выполнены равными 0,517, 0,555, 0,972.
Заданное кинематическое свойство шарнирного четырехзвенника ABCD с присоединенным к шатуну ВС стержнем EG состоит в том,что точка G присоединенного стержня должна описывать траекторию,мало отличающуюся от горизонтальной прямой.Определение оптимальных длин звеньев выбранной схемы механизма проводилась методом направленного поиска на ЭВМ ЕС 1033.В результате реализации такого поиска удалось найти соотношения между не.подвижным 3веном,коромыслом,шатуном и стержнем в виде AD : АВ : ВС : GE 1 : 0,517 : 0,555 : 0,972, которые обеспечивают отклонение точки G от горизонтальной прямой на прямолинейном участке движения не более 0,45 м что соответствует задаваемой точноети. На чертеже схематически показан предлагаемый динамический испытательный стенд со следующей системой и обратной связью. Динамический испытательный стенд содержит четыре шарнирных четырехзвенника ABCD шатуна 1 (ВС), которые соединены с платформой 2 стержнями 3 (GE), а коромысла 4 (АВ и CD) шарнирно закреплены на стойках 5, основания б. Горизонтальное прямолинейное перемещение платформы 2 обеспечивается при следующих соотношениях между размерами звеньев AD : АВ : CD : ВС : GE 1 : 0,517 : 0,517 : 0,055 : 0,972; на платформу 2 уста навливается испытываемый прибор 7. На шатуне 1 одного четырехзвенника закреплена наружная рамка 8 гироско па, шарнирно связанная с внутренней ратлкой 9 гироскопа, в подшипниках которой размещена ось ротора 10 гироскопа. На стержнях 3 других четырехэвенников помещены регулировочны грузы 11. На наружной рамке 8 закреп лен датчик 12 моментов, связанный с осью внутренней рамки 9. Подвижные части стенда представляют собой длиннопериодный физический маятник. Стенд снабжен следящей системой с обратной связью, обес печивающей точность воспроизведения задаваемого закона движения платформы 2. Следящая система включает датчик 13 положения платформы 2, соединенный через блок 14 сравнения и усилитель 15 сигнала рассогласования с датчиком 12 момента. Другой вход блока 14 сравнения связан с генератором 16 задаваемого сигнала. Динамический испытательный стенд работает следующим образом. Генератор 16 задаваемого сигнала настраивается на сигнал, соответствующий задаваемому закону движения платформы 2. На обмотки ротора 10 подается напряжение и ротор 10 раскручивается до номинального числа оборотов. Сигнал с генератора 16 поступает на блок 14 сравнения и далее через усилитель 15 на датчик 12 моментов. Датчик 12 моментов поворачивает внутреннюю рамку 9 гироскопа. Возникший при этом гироскопический момент поворачивает шатун 1 со стержнем 3 и коромыслами 4. Платформа 2 отклоняется от положения равновесия и начинает совершать горизонтальные колебания. При отклонении платформы 2 от положения равновесия на величину, меньшую или большую задаваемой, датчик 13 положения вьадает сигнал на блок 14 сравнения, где он сравнивается с сигналом генератора 16. Сигнал рассогласования через усилитель 15 поступает на датчик 12 моментов,который изменяет угловую скорость поворота внутренней рамки 9 гироскопа. Происходит корректировка гироскопического момента до величины, необходимой для перемещения платформы до задаваемого положения. Регулировку частоты и амплитуды колебаний платформы 2 производят рукояткой генератора. Частоту собственных колебаний стенда для снижения энергоемкости подстраивают под частоту задаваемого сигнала изменением положения регулировочных грузов 11 на стержнях 3. Предлагаемый испытательный стенд выполнен в виде длиннопериодного физического маятника, подвес которого осуществлен на стойках основания при помощи шарнирных четырехзвенников. Это ограничивает габариты стенда параметрами четырехзвенников, что позволяет уменьшить высоту стенг да с 19 м при выполнении маятника в виде физического маятника до 2 2,5 м, т.е. в 7-9 раз. Гиромаятник дает возможность создать колебательную систему, обладающую большим периодом собственных колебаний.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| и др | |||
| Калибровка инфранизкочастотВибрационная техниных датчиков, ка, изд | |||
| МДНТП им.Ф.Э.Дзержинского, 1969, 2 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
