(Л
с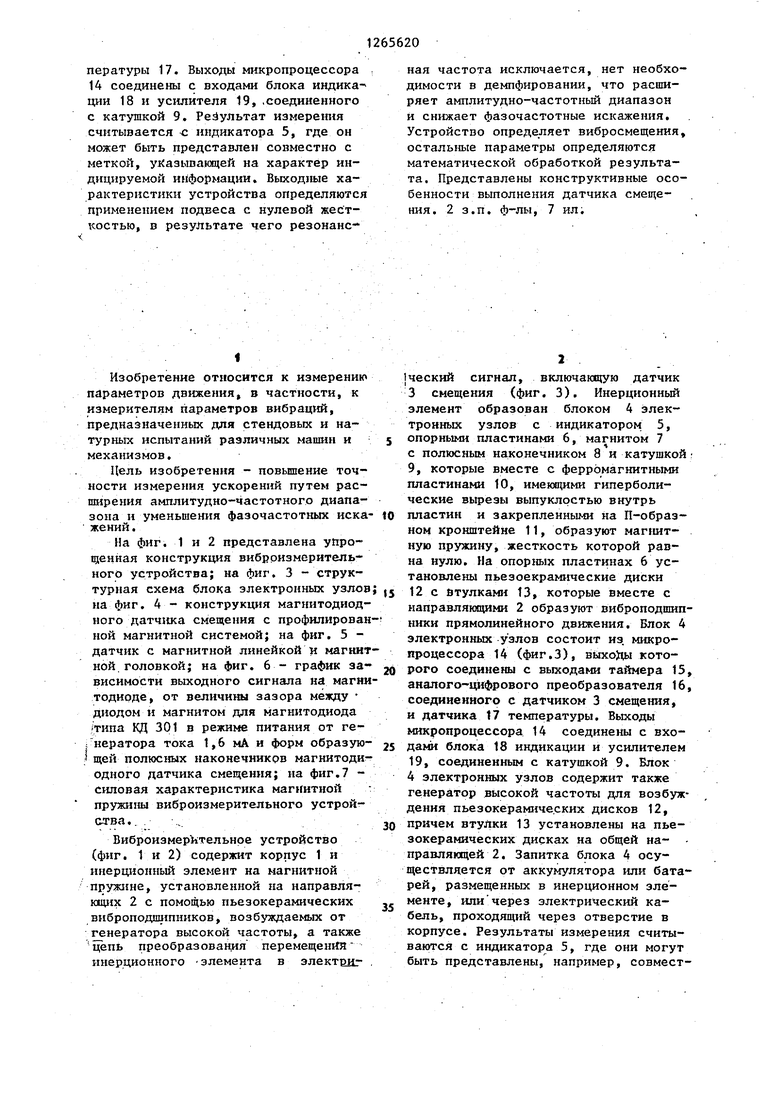

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик виброперемещений | 1985 |
|
SU1272124A1 |
| Вентильный электродвигатель | 1979 |
|
SU847452A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 1994 |
|
RU2082991C1 |
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 2023 |
|
RU2806247C1 |
| МАГНИТНАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 2006 |
|
RU2328348C1 |
| МАГНИТНАЯ СИСТЕМА ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2012 |
|
RU2505784C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МАГНИТНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2046379C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЧАСОВОГО ИНДИКАТОРА | 1987 |
|
RU2023280C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2021 |
|
RU2758892C1 |
| СЕЙСМОМЕТР | 2008 |
|
RU2386151C1 |

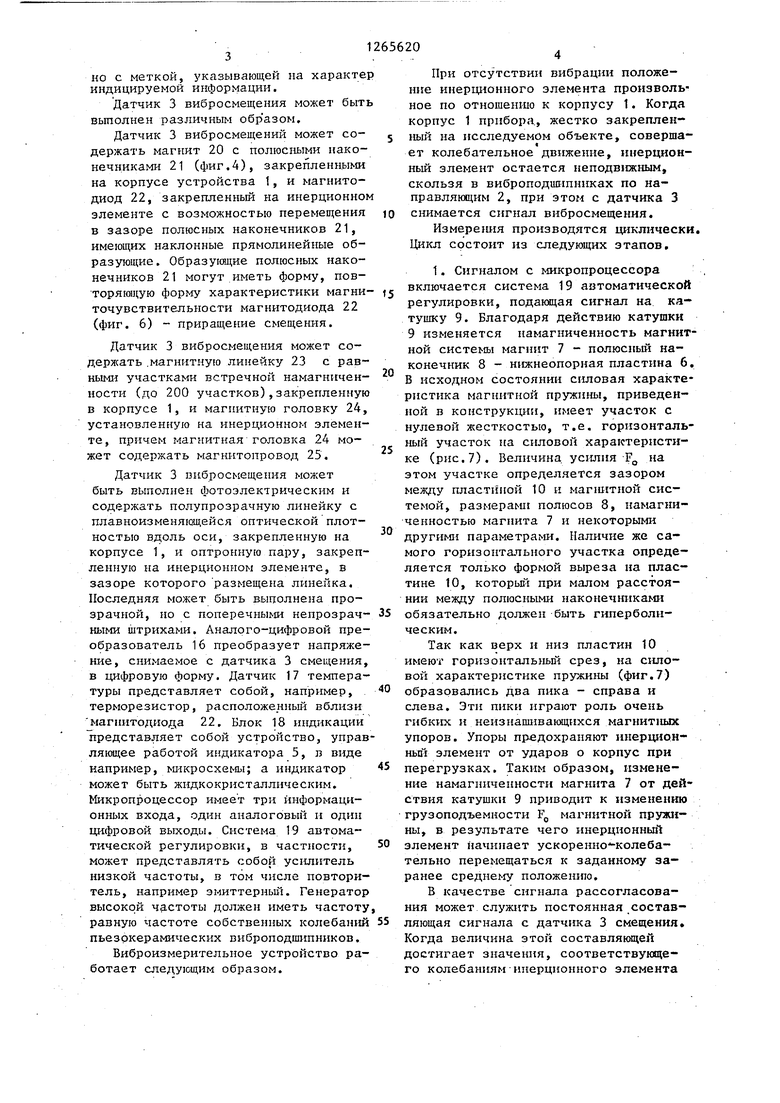
Изобретение относится к измерению параметров движения, в частности к измерителям вибраций в стендовых и натурных испытаниях машин и механизмов. Целью изобретения является повьичеиие точности измерения ускорений. 1}лок электронных узлов состоит из микропроцессора 14, входы которого соединены соответственно с выходам1г таймера 15, аналого-цифрового преобразователя 16, соединенного с датчиком смещения3, и датчика тем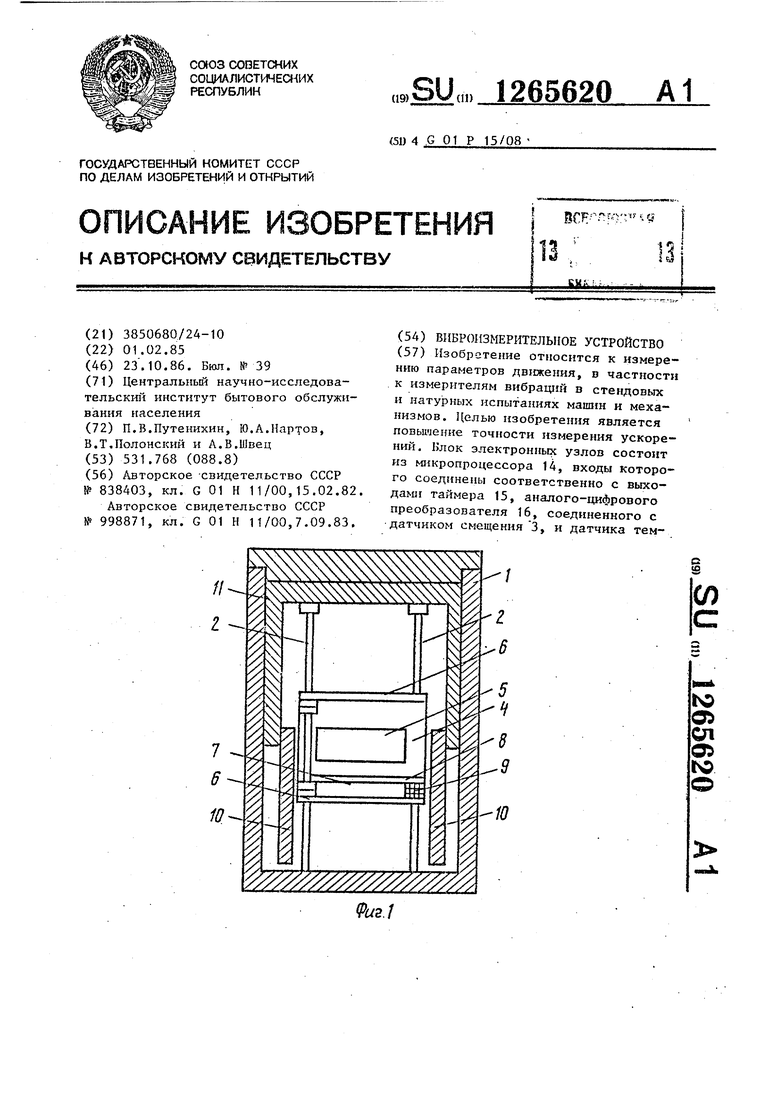
to
О)
ел
а
1C
о
пературы 17. Выходы микропроцессора 14 соединены с входами блока индикации 18 и усилителя 19, .соединенного с катушкой 9. Результат измерения считывается ; индикатора 5, где он может быть представлен совместно с меткой, указывающей на характер индицируемой информации. Вькодные характеристики устройства определяются применением подвеса с нулевой жесткостью, в результате чего резонансИзобретение относится к измерению параметров движения, в частности, к измерителям параметров вибраций, предназначенных для стендовых и натурных испытаний различных машин и механизмов.
Цель изобретения - повьшение точности измерения ускорений путем расширения амплитудно-частотного диапазона и уменьв1ения фазочастотных иска жений.
На фиг. 1 и 2 представлена упрощенная конструкция виброизмерительногр устройства; на фиг. 3 - структурная схема блока электронных узлов на фиг. 4 - конструкция магиитодиодного датчика смещения с профилированной магнитной системой; на фиг. 5 датчик с магнитной линейкой и магнитной головкой; на фиг. 6 - график зависимости выходного сигнала на магнитодиоде, от величины зазора между диодом и магнитом для магнитодиода /типа КД 301 в режиме питания от ге; нератора тока 1,6 мА и форм образуюI щей полюсных наконечников магнитодиодного датчика смещения; на фиг.7 силовая характеристика магнитной пружины виброизмерительного устройства ...
Виброизмер тельнре устройство (фиг. 1 и 2) содержит корпус 1 и инерционный элемент на магнитной пружине, установленной на направляющих 2 с помощью пьезокерамических виброподиитников, возбуждаемых от генератора высокой частоты, а также цепь преобразования перемещений инерционного элемента в электриная частота исключается, нет необходимости в демпфировании, что расширяет амплитудно-частотный диапазон и снижает фазочастотные искажения. Устройство определяет вибросмещения, остальные параметры определяются математической обработкой результата. Представлены конструктивные особенности выполнения датчика смещения. 2 з.п. ф-лы, 7 ил;
}ческий сигнал, включающую датчик
3смещения (фиг. 3). Инерционный элемент образован блоком 4 электронных узлов с индикатором 5, опорными пластинами 6, магнитом 7
с полюсным наконечником 8 и катушкой 9, которые вместе с ферромагнитными пластинами 10, имеющими гиперболические вырезы выпуклостью внутрь пластин и закрепленными на П-образном кронштейне 11, образуют магнитную пружину, жесткость которой равна нулю. На onopiaix пластинах 6 установлены пьезоекрамические диски 12 с втулками 13, которые вместе с направляющими 2 образуют виброподшипники прямолинейного движения. Блок 4 электронных узлов состоит из. микропроцессора 14 (фиг.З), выхойы которого соединены с выходами таймера 15, анапого-ц11фрового преобразователя 16, соединенного с датчиком 3 смещения, и датчика t7 температуры. Выходы микропроцессора 14 соединены с входа м блока 18 индикации и усилителем 19, соединенным с катушкой 9. Блок
4электронных узлов содержит также генератор высокой частоты для возбуждения пьезокерамических дисков 12, причем втулки 13 установлены на пьезокерамических дисках на общей на- правлякщей 2. Запитка блока 4 осуществляется от аккумулятора или батарей, размещенных в инерционном элементе, или через электрический кабель, проходящий через отверстие в корпусе. Результаты измерения считываются с индикатора 5, где они могут быть представлены, например, совместно с меткой, указывающей на характе индицируемой информации. Датчик 3 вибросмещения может быт вьшолнен различным образом. Датчик 3 Бибросмещений может содержать магнит 20 с полюсными наконечниками 21 (фиг.4), закрепленными на корпусе устройства 1, и магнитодиод 22, закрепленный на инерционно элементе с возможностью перемещения в зазоре полюсных наконечников 21, имеющих наклонные прямолинейные образующие. Образугацие полюсных наконечников 21 могут иметь форму, повторяющую форму характеристики магни точувствительности магнитодиода 22 (фиг. 6) - приращение смещения. Датчик 3 вибросмещения может со- дерясать .магнитную линейку 23 с равными участками встречной намагниченности (до 200 участков),закрепленную в корпусе 1, и магнитную головку 24, установленную на инерционном элементе, причем магнитная головка 24 может содержать магннтопровод 25. Датчик 3 вибросмещения может быть выполнен фотоэлектрическим и содержать полупрозрачную линейку с плавноизменя сщейся оптической плотностью вдоль оси, закрепленную на корпусе 1, и оптронную пару, закрепленную на инерционном элементе, в зазоре которого размещена линейка. Последняя может быть выполнена прозрачной, но с поперечными непрозрачными штрихами. Аналого-цифровой преобразователь 16 преобразует напряжение, снимаемое с датчика 3 смещения в цифровую форму. Датчик 17 температуры представляет собой, например, терморезистор, расположенный вблизи магнитодио5а 22. Блок 18 индикации представляет собой устройство, управ ляющее работой индикатора 5, в виде например, шкросхемы; а индикатор может быть жидкокристаллическим. Микропроцессор имеет три информационных входа, один аналоговый и один цифровой выходы. Система 19 автоматической регулировки, в частности, может представлять собой усилитель низкой частоты, в том числе повторитель, например эмиттерньш. Генератор высокой частоты должен иметь частоту рапную частоте собственных колебаний пьезркерамических виброподшипников. Виброизмерительное устройство работает следующим образом. При отсутствии вибрации положение инерционного элемента произвольное по отношеншо к корпусу 1. Когда корпус 1 прибора, жестко закрепленный на исследуемом объекте, совершает колебательное движение, ннерционньш элемент остается неподвижным, скользя в виброподшшниках по направляющим 2, при этом с датчика 3 снимается сигнал вибросмащения. Измерения производятся циклически. Цикл состоит из следующих этапов. 1. Сигналом с микропроцессора включается система 19 азтоматической регулировки, подакщая сигнал на катушку 9. Благодаря действию катушки 9 изменяется намагниченность магнитной системы MariHiT 7 - полюсный наконечник 8 - нижнеопорная пластина 6. В исходном состоянии силовая характеристика магнитной пружины, приведенной в конструкции, имеет участок с нулевой жесткостью, т.е. горизонтальный участок на силовой характеристике (рис.7). Величина, усилия F на этом участке определяется зазором между пластиной 10 и магнитной системой, размерам полюсов 8, намагниченностью магнита 7 и некоторыми ДРУГИМ параметрами. Наличие же самого горизонтального участка определяется только формой выреза на пластине 10, которьй при малом расстоянии между полюсными наконечниками обязательно должен быть гиперболическим. Так как верх и низ пластин 10 имеют горизонтальньй срез, на силовой характеристике пружины (фиг.7) образовались два пика - справа и слева. Эти пики играют роль очень гибких и неизнашивающихся магнитных упоров. Упоры предохраняют инерционньш элемент от ударов о корпус при перегрузках. Таким образом, изменение намагниченности магнита 7 от действия катушки 9 приводит к изменению грузоподъемности F магнитной пружины, в результате чего инерционньи1 элемент начинает ускоренно-колебательно перемещаться к заданному заранее среднему положению. В качестве сигнала рассогласования может служить постоянная составляющая сигнала с датчика 3 смещения. Когда величина этой составляющей достигает значения, соответствующего колебаниям инерционного элемента около среднего положения в корпусе прибора, цикл авторегулировки прекращается, система автоматической регулировки выключается, и величина подмагничивания катушки 9 фиксируется на полученном уровне,при этом фиксируется и значение F,,. Прибор может быть установлен наклонно. Процесс установки инерционного элемента в среднее положение протекает аналогично при тех же элементах. Если угол наклона от вертикали б.ольшой (вплоть до горизонтального положения оси чувствительного прибора), то кронштейн 11 с пластинами 10 может быть удален, а на его место установлен другой, пластины 10 которого имеют меньшую магнитную проницаемость и (или) больший зазор с магнитной системой. В этом случае диапазон изменения грузоподъемности Fe пружины смещается вниз, что позволяет обойтись системой 19 автоматической регулировки с меньшим диапазоном регулировки. Для горизонтального положения оси чувствительности прибора пластины 10 могут иметь, например, треуголыгую форму, как показано на фиг. 2 штриховой линией. 2. В течение 1-2-х периодов колебания прибора фиксируются основные параметры кoлeбaтeJlьнoгo процес са. Поскольку жесткость магнитной пружины нулевая - собственная часто та колебаний инерционного элемента равна нулю. Время измерения практически не превышает нескольких секун поэтому инерционный элемент не успе вает заметно отклониться от среднего положения за счет случайных возмущений. Это, а также отсутствие демпфирования, делает амплитудночастотную и фазочастотную характеристики виброизмерительного прибора строго горизонтальными на всем частотном диапазоне, т.е. соответствую щие искажения минимальны. С исследуемым объектом колеблются только . корпус 1 и закрепленные на нем ферромагнитные пластины 10. П-образный кронштейн 11, направляющие 12 и соответствугадие элементы датчиков 3 смещения и их деформации на высоких частотах не отражаются на показания прибор.а, поскольку они связаны с инерционным элементом только силой магнитного взаимодействия. Масса же Колеблющихся элементов датчика 3 см .ения незначительна, и они практиески не подвержены вибродеформацим и вибростарению. Таким образом, частотный диапазон иброизмерительного прибора имеет ысокий предел и б сторону высоких астот. То, что основная масса уст- ойства заключена в инерционном элеенте, обеспечивает малое искажение, вносимое устройством в саму исследумую цепь, поскольку амплитуду и частоту колебаний исследуемого объекта изменяет только масса устройства, естко соединенная с ним. 3. Измеренные параметры колебательного процесса - частота и форма колебания - обрабатываются микропроцессором. В частности, определяются амплитуды виброускорений, виброскорости и т.п. По определенной программе, например, с небольшим интервалом времени все эти величины выводятся на индикатор 5. Выходные характеристики устройства полностью определяются применением подвеса t нулевой жесткостью, в результате чего резонансная частота исключаемся, отпадает необходимость в демпфировании, что и расширяет амплитудно-частотный диапазон и снижает фазочастотные искажения. . Устройство определяет только вибросмещения. Остальные параметры опре деляются математической обработкой полученного результата. Программа работы устройства заносится в память микропроцессора 14. Формула изобретения 1. Виброизмерительное устройство, содержащее корпус, в котором размещен инерционный элемент на магнитной пружине, установленный на направляющих посредством пьезокерамических виброподшипников с пьёзокерамическими дисками и втулками, подключенных к генератору высокой частоты, и преобразовательную цепь, состоящую из датчика смещений, микропроцессора и блока индикации. Отличающееся тем, что, с целью повышения точности измерения, в него введеш 1 установленный в корпусе П-образный кронштейн, охватывающий инерционный элемент и несущий на своих концах две ферромагнитные пластины с вырезами гиперболической формы, а также опорные пластины, магнит с полюсными наконечниками и катушка, перекрываемые ферромагнитными пластинами, установленные на инерционном элементе и образукяцие совместно магнитную пружину нулевой жесткости, датчик температуры, таймер, аналогоцифровой преобразователь, подключенные к информационным входам микропро цессора, и усилитель, подключенный к аналоговому выходу микропроцессора, причем вход анолого-цифрового преобразователя подключен к датчику смещений, цифровой выход микропроцессора - к входу блока индикации, а катушка подсоединена к выходу усилителя, при этом датчик температуры, тай мер, аналого-цифровой преобразователь, микропроцессор, усилитель. блок индикации и генератор высокой частоты установлены на инерционном элементе, а пьезокерамические диски с втулками - на опорных пластинах. 2.Устройство ПОП.1, отличаю щ е е с я тем, что датчик смещений содержит магнит с полюсными наконечниками, закрепленный на корпусе устройства, и магнитодиод, закрепленный на инерционном элементе с позможностью перемещения в зазоре полюсных наконечников. 3.Устройство по П.1, о т л и ч.аю щ е е с я тем, что датчик смещений содержит магнитную линейку с равными участками встречной намагниченности, закрепленную на корпусе, и магнитную , головку, установленную на инерционном элементе.
| Виброметр | 1979 |
|
SU838403A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Виброметр | 1981 |
|
SU998871A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
