Изобретение относится к машиностроению и преимущественно к магнитным опорам вертикальных роторов быстровращающихся приборов, гироскопов, накопителей энергии, генераторов, турбомолекулярных насосов, центрифуг. Изобретение относится, главным образом, к многофункциональным магнитным опорам, в которых верхняя магнитная опора ротора не только разгружает нижнюю опору от осевой нагрузки, но и одновременно обеспечивает радиальную жесткость и центровку ротора относительно корпуса, а также создает магнитное поле, в котором устанавливают датчики для определения параметров вращающегося ротора.
Известно техническое решение (Патент РФ: RU 2180435, G01М 1/22, В04В 9/14, 05.11.1999), в котором расположенный в магнитном поле опоры пластинчатый индуктор взаимодействует с неподвижно установленным около него датчиком в виде индуктивной катушки и индуцирует в ней переменный ток в виде сигнала, обработка которого позволяет выделить информацию о скорости вращения и радиальных или осевых перемещениях ротора.
Размещение пластинчатого индуктора на быстровращающемся роторе создает проблемы совместности его деформаций с другими деталями ротора и обеспечения прочности индуктора.
Известна магнитная опора вертикального ротора, принятая за прототип, которая содержит ферромагнитную втулку, закрепленную соосно на роторе, кольцевой аксиально намагниченный магнит, установленный в корпусе над втулкой, и полюсный наконечник в виде кольца с радиальной полкой у торца, примыкающего к нижнему торцу магнита. Ферромагнитная втулка выполнена с кольцевым радиальным выступом у верхнего торца втулки и радиальным отгибом, выполняющим функцию индуктора, у нижнего торца втулки (Патент РФ RU 2054334, В04В 9/12, 11.11.1992).
Это изобретение повышает жесткость магнитной опоры и снижает давление на нижнюю опору. Одновременно расположенная вблизи радиального отгиба нижнего торца втулки индуктивная катушка воспринимает изменения магнитного потока в магнитной опоре при вращении и колебаниях ротора и используется для определения его параметров.
Недостаток известного решения состоит в том, что одностороннее расположение датчика вызывает возникновение несимметричной нагрузки на ротор, которая может быть существенной в магнитных опорах роторов чувствительных приборов. Кроме того, датчик, воспринимающий изменения магнитного поля при вращении ротора, расположен во внутренней полости с вращающимся ротором, которая может находиться под действием агрессивных пылевых и газовых сред и повышенных температур, что препятствует свободному доступу к датчику без вскрытия внутренней полости корпуса.
Задача, на решение которой направлено изобретение, заключается в создании многофункциональной верхней магнитной опоры ротора с датчиком оборотов, не создающим несимметричных относительно оси вращения ротора возмущений и вынесенным из внутренней полости корпуса ротора без усложнения конструкции опоры.
Для этого в магнитной опоре вертикального ротора, включающей установленный в корпусе кольцевой магнит, размещенную на роторе ферромагнитную втулку, расположенную напротив нижнего торца магнита, и датчик замера частоты вращения ротора, датчик установлен в аксиальном зазоре между нижним торцом магнита и верхним торцом втулки.
Дополнительно датчик установлен снаружи корпуса.
Кроме того, на нижнем торце магнита установлен полюсный наконечник из ферромагнитного материала.
Дополнительно верхний торец втулки выполнен в виде зубчатого венца.
Дополнительно огибающая зубчатого венца имеет форму синусоиды.
Дополнительно глубина впадин зубчатого венца составляет 0,01-0,03 от среднего диаметра верхнего торца втулки.
Дополнительно высота одного зуба венца составляет 0,4-0,9 от высоты остальных зубцов.
Дополнительно чувствительный элемент датчика выполнен в виде катушки индуктивности.
Дополнительно датчик выполнен из ряда последовательно соединенных катушек индуктивности, сдвинутых в круговом направлении одна от другой на угол, кратный углу чередования зубцов венца.
Дополнительно число витков, по крайней мере, одной из катушек на 5-50% отличается от числа витков других катушек.
Дополнительно датчик выполнен в виде пластины с закрепленными в ней, например, термореактивной смолой, катушками.
Изобретение поясняется чертежами:
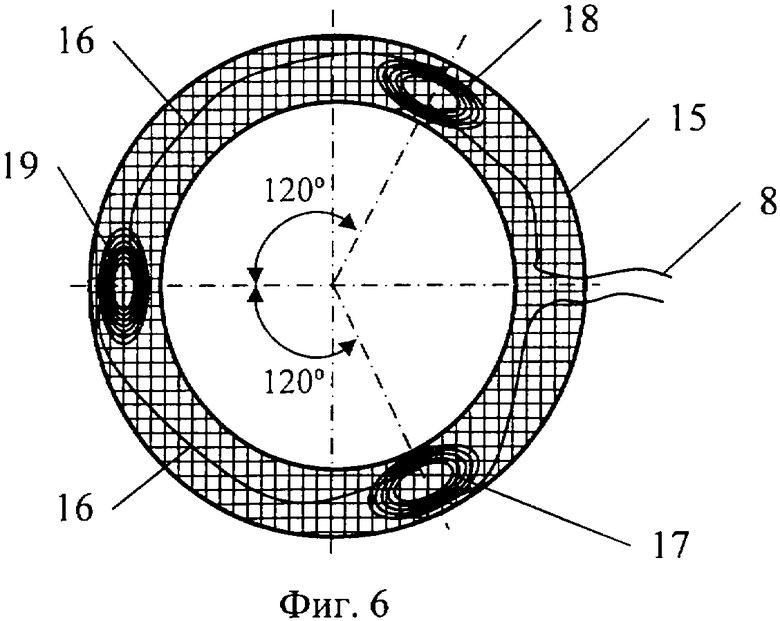
фиг.1 - продольный разрез магнитной опоры вертикального ротора с датчиком во внутренней полости корпуса;
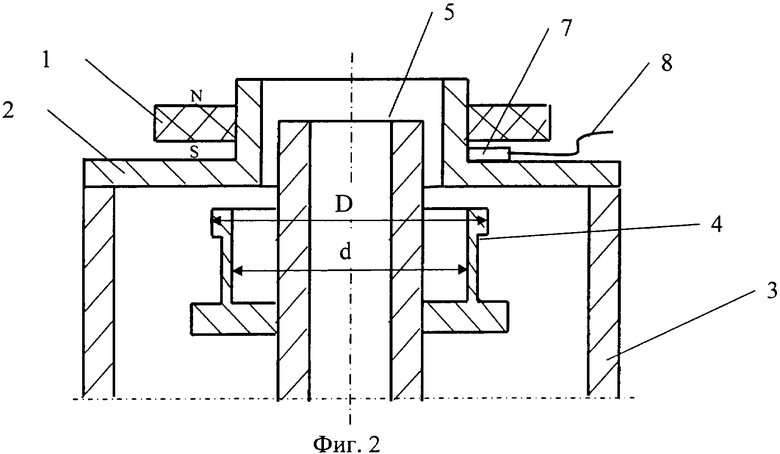
фиг.2 - продольный разрез магнитной опоры вертикального ротора с датчиком снаружи корпуса;
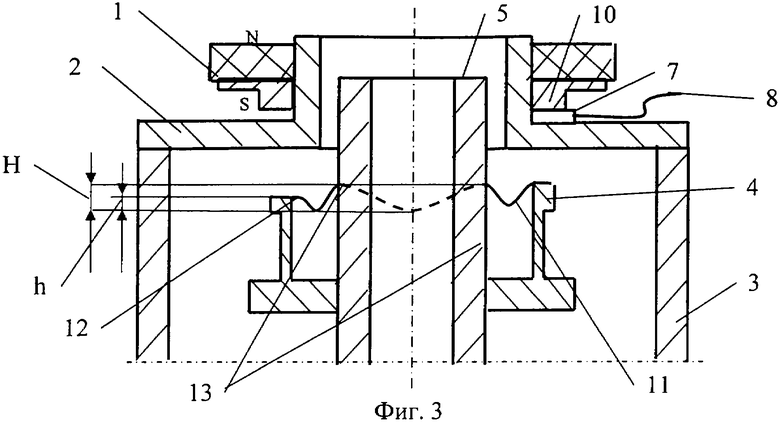
фиг.3 - вариант выполнения опоры с полюсным наконечником и с втулкой с зубчатым венцом;
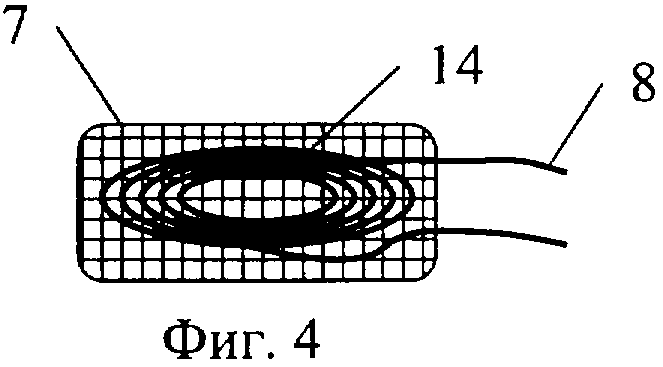
фиг.4 - вариант выполнения датчика с катушкой индуктивности;
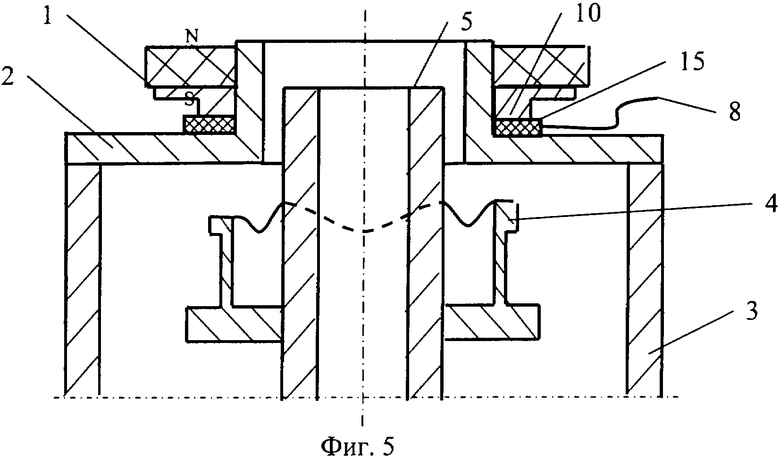
фиг.5 - вариант выполнения опоры с датчиком из нескольких катушек индуктивности;
фиг.6 - вариант выполнения датчика с несколькими катушками индуктивности.
Магнитная опора вертикального ротора содержит кольцевой аксиально намагниченный магнит 1, установленный на немагнитной крышке 2 корпуса 3 (фиг.1), ферромагнитную втулку 4, закрепленную на роторе 5 соосно с ним в его верхней части и расположенную напротив нижнего торца магнита 1 с полюсом S. Ротор 5 опирается на нижнюю опору 6, а в верхней магнитной опоре не имеет механического контакта с неподвижными деталями. Датчик 7 замера частоты вращения установлен во внутренней полости корпуса 3 под крышкой 2 в аксиальном зазоре между нижним торцом магнита 1 и верхним торцом втулки 4. Выводы 8 датчика через уплотняющую втулку 9 в крышке 2 проходят из внутренней полости корпуса 3 для соединения с регистрирующими приборами.
В варианте выполнения магнитной опоры (фиг.2) датчик 7 вынесен из внутренней полости корпуса 3 и установлен на крышке 2 под магнитом 1.
В другом варианте выполнения магнитной опоры (фиг.3) на нижний торец магнита 1 установлен полюсный наконечник 10. Датчик 7 расположен между нижним торцом наконечника 10 и верхним торцом втулки 4. Верхний торец втулки 4 выполнен в виде зубчатого венца. Огибающая 11 зубчатого венца имеет форму синусоиды с шестью впадинами с глубиной Н от верхнего торца втулки 4. Глубина впадин H зубчатого венца составляет 0,01-0,03 от среднего диаметра верхнего торца втулки, так что выполняется соотношение Н=(0,01-0,03)(D+d)/2, где
D - наружный диаметр верхнего торца втулки;
d - внутренний диаметр верхнего торца втулки.
Высота h зуба 12 выполнена меньше, чем высота Н остальных пяти зубьев 13, так что выполняется соотношение h=(0,4-0,9)Н.
Чувствительный элемент датчика 7 (фиг.4) выполнен в виде катушки индуктивности 14, расположенной в пластине, и имеет выводы 8.
Датчик 15 (фиг.5 и фиг.6) выполнен в виде пластины с закрепленными в ней рядом последовательно соединенных проводниками 16 индуктивных катушек 17, 18 и 19, сдвинутых в круговом направлении одна от другой на угол 120°, кратный углу чередования шести зубцов венца. Причем катушка 19 выполнена с отличным на 5-50% от катушек 17 и 18 числом витков. Катушки закреплены в кольцевой пластине.
Магнитная опора работает следующим образом.
В покое и при вращении ротора 5 осесимметричное магнитное поле магнита 1 удерживает ферромагнитную втулку 4 и связанный с ней ротор 5 в вертикальном положении, не препятствуя вращению ротора 5 на опоре 6. В случае отклонения ротора от оси корпуса 3 симметричность магнитного поля нарушается, что создает радиальную силу, препятствующую отклонению ротора 5 и возвращающую ротор 5 в исходное положение при прекращении действия возмущающей силы.
Датчик 7, расположенный внутри корпуса 3 (фиг.1) в магнитном потоке, в зазоре между магнитом 1 и втулкой 4, реагирует на изменения этого магнитного потока, которые возникают при вращении ротора 5 и при отклонении его от оси вращения. Сигнал с датчика 7 через уплотняющую втулку 9 поступает на вывод 8.
Датчик 7, расположенный снаружи корпуса 3 (фиг.2) в магнитном потоке, в зазоре между магнитом 1 и втулкой 4, реагирует на изменения этого магнитного потока, которые возникают при вращении ротора 5 и при отклонении его от оси вращения. Сигнал с датчика 7 непосредственно поступает на вывод 8.
Датчик 7, расположенный снаружи корпуса 3 (фиг.3) в магнитном потоке, в зазоре между магнитом, полюсным наконечником 10 и втулкой 4, реагирует на изменения более плотного магнитного потока, создаваемого полюсным наконечником 10, которые возникают при вращении ротора 5 и при отклонении его от оси вращения. Более мощный сигнал с датчика 7 непосредственно поступает на вывод 8, что повышает чувствительность датчика.
Дальнейшее повышение чувствительности датчика 7 обеспечивается выполнением верхнего торца втулки 4 в виде зубчатого венца с огибающей 11 в виде синусоиды. Причем выполнение глубины впадин зубчатого венца, составляющей 0,01-0,03 от среднего диаметра верхнего торца втулки 4, позволяет обеспечить наилучшее сочетание величины подъемной силы магнитной опоры, ее радиальной жесткости и приемлемой величины получаемого с датчика 7 сигнала.
При вращении ротора 5 пики и впадины огибающей 11 зубчатого венца в форме синусоиды, проходя под датчиком 7, создают более быстрые изменения магнитного потока, в результате чего величина сигнала датчика 7 увеличивается и возрастает его чувствительность. Кроме того, частота сигнала датчика 7 увеличивается кратно количеству зубцов, что облегчает обработку сигнала датчика 7 в регистрирующем приборе. А при выполнении высоты одного зуба 12 венца, составляющей 0,4-0,9 от высоты остальных зубцов 13, сигнал, поступающий с датчика 7, становится привязанным к фазе вращения ротора 5, что при обработке сигнала позволяет определить не только скорость вращения и амплитуду отклонения ротора 5 от оси вращения, но и положение ротора 5 в пространстве в любой момент времени.
При выполнении чувствительного элемента датчика 7 в виде плоской катушки индуктивности 14 с небольшим количеством витков, закрепленной на пластине термореактивной смолой (фиг.4), значительно упрощается конструкция датчика и магнитной опоры. Повышение чувствительности в такой конструкции обеспечивается выполнением датчика 15 (фиг.6) с чувствительными элементами из ряда последовательно соединенных проводниками 16 катушек индуктивности 17, 18, 19, сдвинутых в круговом направлении одна от другой на угол 120°, кратный углу чередования шести зубцов венца, в результате чего сигнал с катушек суммируется на выводах 8. При этом для выделения фазы вращения ротора 5 из сигнала такого датчика 15 число витков катушки 19 на 5-50% отличается от числа витков других катушек 17 и 18, что позволяет определять по величине сигнала на выводах 8 положение зуба 12 с меньшей высотой зуба относительно катушек датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тахометр постоянного тока | 1989 |
|
SU1704094A1 |
| Устройство для преобразования угловой скорости электродвигателя | 1990 |
|
SU1704095A1 |
| Тахометр постоянного тока | 1986 |
|
SU1530991A1 |
| Магнитоэлектрический двигатель | 1980 |
|
SU1103328A1 |
| Магнитоэлектрический двигатель | 1978 |
|
SU1099359A1 |
| Магнитоэлектрический двигатель | 1980 |
|
SU909764A2 |
| ЧАСОВОЙ СЕМИСЕГМЕНТНЫЙ ИНДИКАТОР | 1988 |
|
RU2050573C1 |
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
| Магнитоэлектрический генератор | 2018 |
|
RU2697812C2 |
| Шаговый электродвигатель | 1987 |
|
SU1826109A1 |
Изобретение относится к машиностроению и преимущественно к магнитным опорам вертикальных роторов быстровращающихся приборов, накопителей энергии, центрифуг. Магнитная опора вертикального ротора включает установленный в корпусе кольцевой магнит, размещенную на роторе ферромагнитную втулку, расположенную напротив нижнего торца магнита, и датчик замера частоты вращения ротора. При этом датчик установлен в аксиальном зазоре между нижним торцом магнита и верхним торцом втулки. Технический результат заключается в том, что в опоре не создается несимметричных относительно оси вращения ротора возмущений, а датчик вынесен из внутренней полости корпуса ротора без усложнения конструкции опоры. 10 з.п. ф-лы, 6 ил.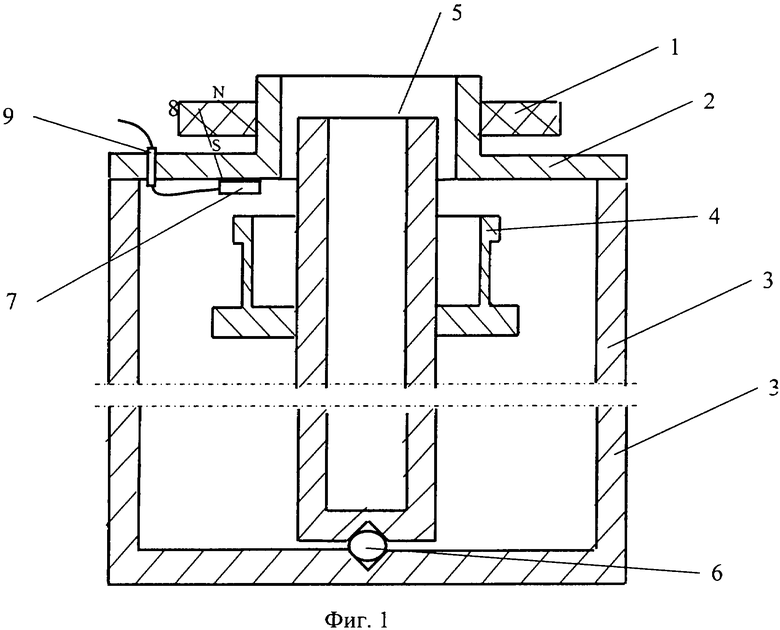
| МАГНИТНАЯ ОПОРА РОТОРА ГАЗОВОЙ ЦЕНТРИФУГИ | 1992 |
|
RU2054334C1 |
| МАГНИТНАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 2003 |
|
RU2242287C2 |
| GB 1379987 A, 08.01.1975 | |||
| Устройство для снятия верхнего слоя грунта | 1986 |
|
SU1392210A1 |

