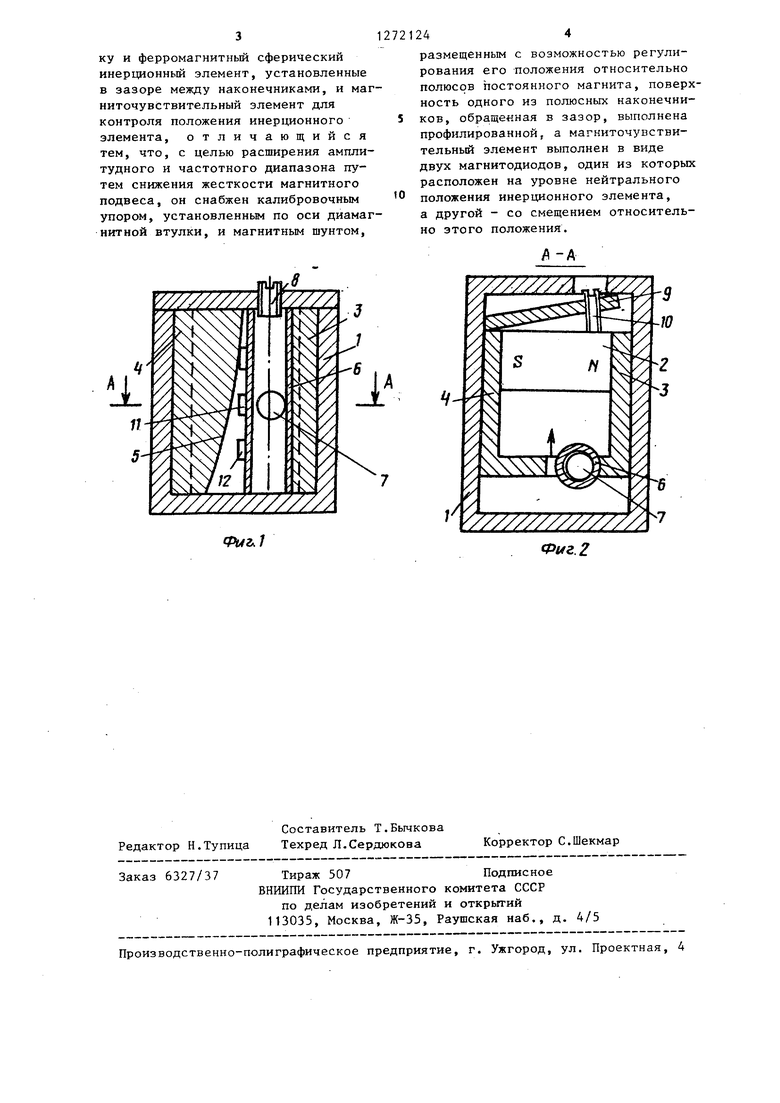
Изобретение относится к измерительной технике и предназначено для измерения значительных по амплитуде низкочастотных вибраций, происходящих в вертикальной плоскос7и. Цель изобретения - расширение амплитудного и частотного диапазона измеряемых вибраций путем снижения жесткости магнитного подвеса инерционного элемента датчика виброперемещений.. На фиг. 1 представлен датчик виб роперемещений, вертикальный разрез, на фиг. 2 - разрез А-А на фиг. 1. Датчик виброперемещений содержит корпус 1 и установленный в нем пост янньй магнит 2 с двумя полюсными наконечниками 3 и 4. Поверхность од ного из полюсных наконечников, н:апр мер 4, выполнена профилированной в виде скоса 5. В зазоре между полюсными наконечниками 3 и 4 вертикально расположена диамагнитная втулка 6, внутри которой размещен ферромагнитньш сферический инерилон ный элемент 7. На одном конце втулки 6, соосно с ней, в корпусе 1 установлен калибровочный упор 8, а на магните 2 установлен магнитный шунт 9 с регулировочным винтом 10. В зазоре между полюсными наконеч никами 3 и 4, например, между втулкой 6 и полюсным наконечником 4 раз мещены два магнитодиода 11 и 125 один из которых (например, 11) расп ложен на уровне нейтрального положения инерционного элемента 7, а другой (12) - со смещением относительно этого нейтрального положения на величину, равную максимальной, предварительно заданной амплитуде Измеряемых вибраций. Датчик виброперемещений работает следующим образом. Корпус 1 жестко крепится на конт ролируемом объекте, после чего производится настройка и калибровка да чика. Настройка датчика осуществляется установкой инерционного элемен та 7 в нейтральное положение, в котором сигнал, снимаемой с магиитодиода 11, должен быть максимальным. Регулировка положения инерционного элемента 7 вдоль вертикальной оси датчика осуществляется изменением положения магнитного шунта 9 с помощью регулировочного винта 10. Калибровка вибродатчика производится 4 поворотом его на IttU вокруг горизонтальной оси. При этом.инерционный элемент 7 располагается на калибровочном упоре 8, что равнозначно его отклонению от нейтрального положения на калиброванную величину, задаваемую упором 8. В этом положении датчика изменяется проводимость магнитодиода 12, смещенного относительно нейтрального положения инерционного элемента 1, По его сигналу определяют показания инДикатора внешнего измерительного устройства (не показан), т.е. осуществляют калибровку датчика. При возникновении вибраций корпус 1 датчика совершает колебания в вертикальной плоскости, его инерционный элемент при этом перекатывается по направляющей втулке 6. Смещение инерционного элемента 7 относительно магнитодиода 12 приводит к появлению на выходе датчика сигнала, пропорционального амплитуде переменил элемента 7. Плавно увеличивающийся по вертикали вниз зазор между полюсными наконечниками 3 и 4, благодаря профилированию последнего, обуславливает наличие на силовой характеристике магнитного подвеса (пружины) участка с меньшей крутизной по сравнению с магнитным подвесом, в котором зазор имеет постоянную величину. Если поверхность полюсного наконечника 4 имеет профиль в виде гиперболы, силовая характеристика магнитного подвеса максимально приближается к прямолинейной. Малая жесткость системы магнитного подвеса инерционного элемента, выполненная указанным образом, позволяет получить низкую резонансную частоту собственных колебаний датчика, что расширяет частотный диапазон измеряемых виброперемещений в сторону низких частот, а увеличение линейных размеров полюсных наконечников вдоль измерительной (вертикальной) оси расширяет амплитудный диапазон измеряемых виброперемещений. Формула изобретения . Датчик виброперемещений, содержащий корпус, размещенные в нем магнитный подвес, выполненный в виде постоянного магнита с двумя полюсными наконечниками, диамагнитную втул3ку и ферромагнитный сферический инерционный элемент, установленные в зазоре между наконечниками, и маг ниточувствительный элемент для контроля положения инерционного элемента, отличающийся тем, что, с целью расширения амплитудного и частотного диапазона путем снижения жесткости магнитного подвеса, он снабжен калибровочным упором, установленньм по оси диамаг нитной втулки, и магнитным шунтом. 244 размещенным с возможностью регулирования его положения относительно полюсов постоянного магнита, поверхность одного из полюсных наконечников, обращенная в зазор, выполнена профилированной, а магниточувствительный элемент выполнен в виде двух магнитодиодов, один из которых расположен на уровне нейтрального положения инерционного элемента, а другой - со смещением относительно этого положения.
Фиг.1
Фиг. 2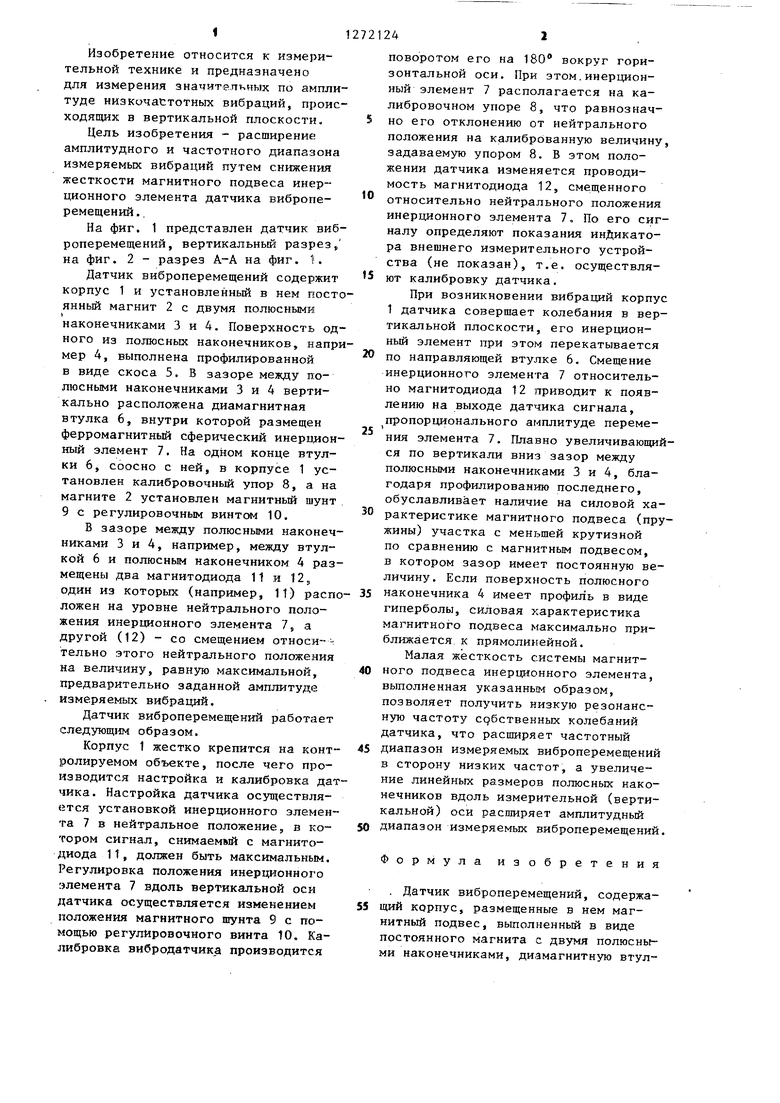
| название | год | авторы | номер документа |
|---|---|---|---|
| Виброизмерительное устройство | 1985 |
|
SU1265620A1 |
| Вибродатчик | 1990 |
|
SU1778549A1 |
| Вибродатчик | 1984 |
|
SU1226068A1 |
| Датчик наклона и вибрации | 2019 |
|
RU2707583C1 |
| Датчик вибраций | 1985 |
|
SU1285325A1 |
| Акселерометр | 1986 |
|
SU1363077A1 |
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
| Виброметр | 1979 |
|
SU838403A1 |
| Вибропреобразователь | 1982 |
|
SU1145249A1 |
| Вибродатчик | 1990 |
|
SU1820232A1 |
Изобретение относится к измерительной технике и предназначено для измерения амплитуд механических виброперемещений. Оно позволяет снизить динамическую жесткость магнитного подвеса инерционного элемента датчика виброперемещений и увеличить длину силовой характеристики, . что обеспечивает расширение амплитудно-частотного диапазона измеряемых виброперемещений. Вибродатчик содержит магнитньй подвес с полюсными наконечниками, один из которых имеет профилированный скос, направляющую диамагнитную втулку и шарик - инерционный элемент, расположенный в зазоре полюсных наконечников. Скос образует равномерно увеличивающийся зазор полюсных наконечников, в результате чего снижается динамическая жесткость магнитного подвеса. Полоi жение шарика контролируется магнитодиодом, расположенным в зазоре по(Л люсных наконечников и изменяющим свою проводимость в зависимости от расстоянии инерционного.элемента датчика до него. 2 ил. 1С to N3 4
| Вибрационный преобразователь | 1981 |
|
SU1021950A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
