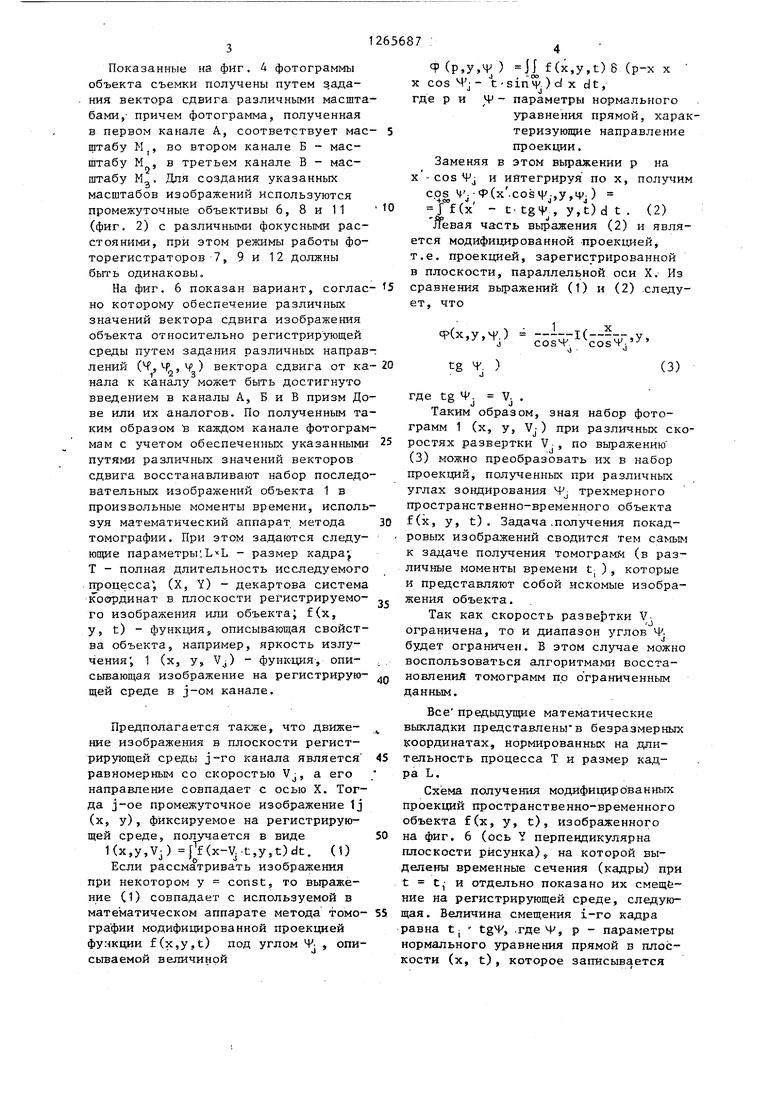
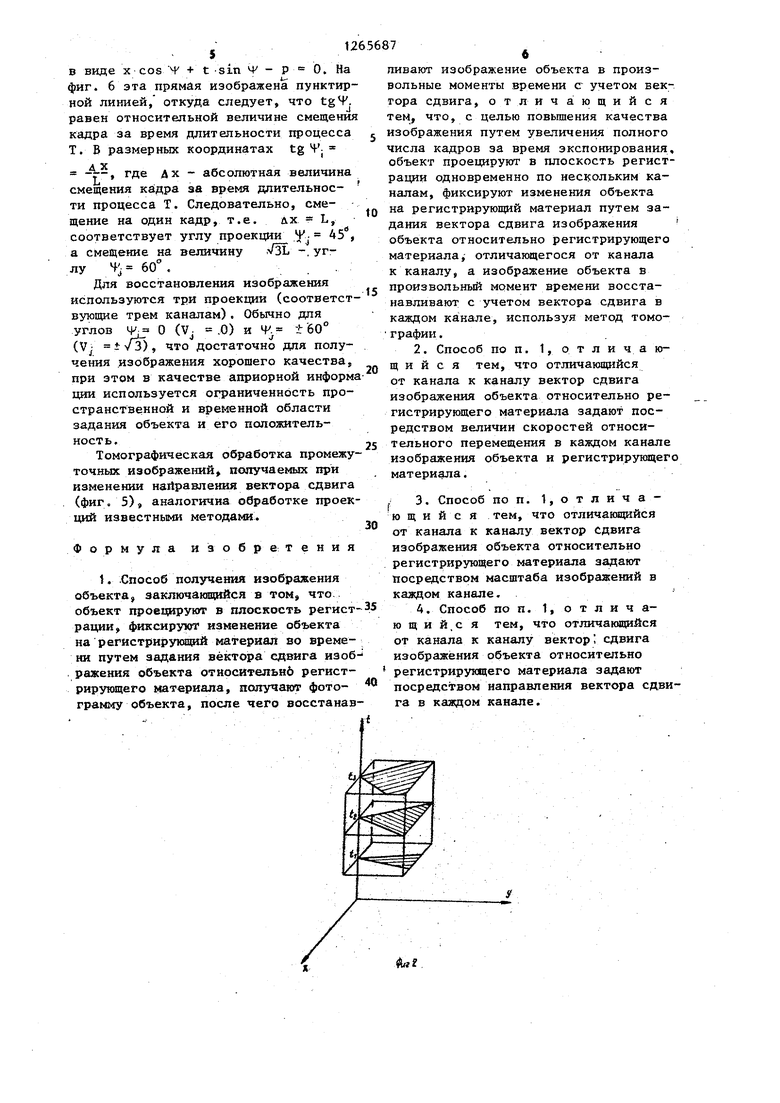
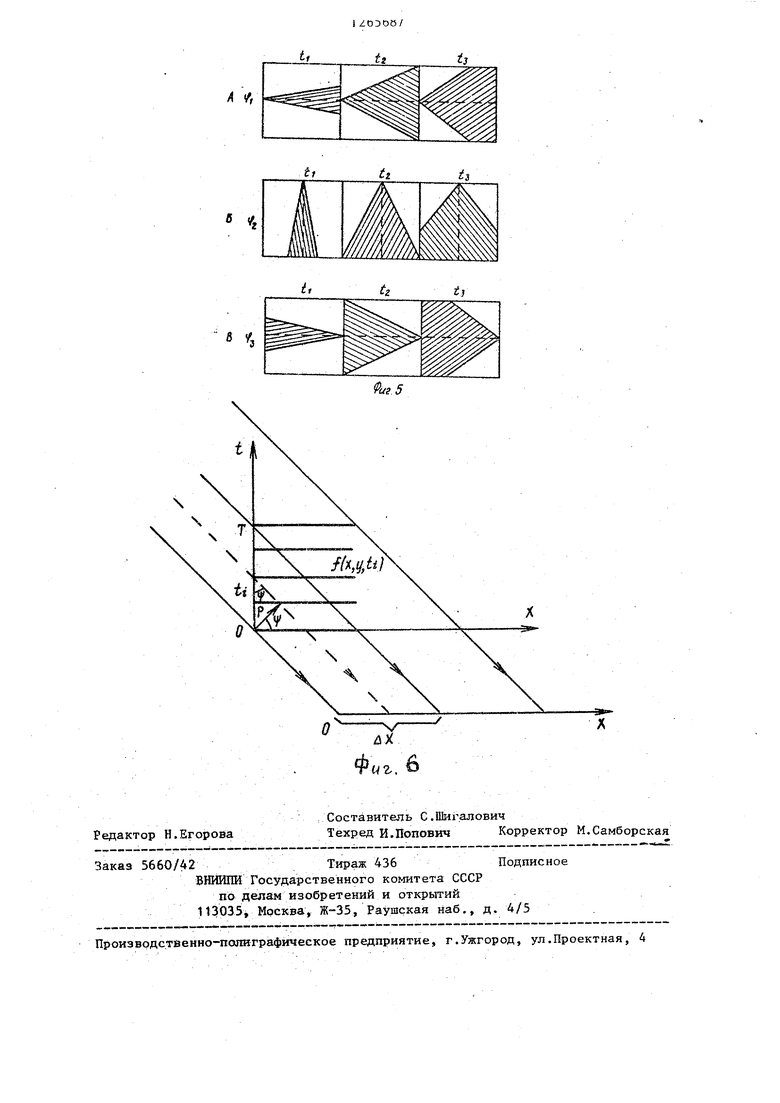
f-fc Изобретение относится к способам высокоскоростиой съемки и воспроизведения изображения и может быть использовано при исследованиях быст ропротекающих процессов. . Целью изобретения является повышение качества изображения путем увеличения полного числа кадров за время экспонирования. На фиг. 1 приведена принципиальная схема реализации способа; на фиг. 2 7 три стадии двумерного объек та, изменяющегося во времениj на фиг. 3 - фотограммы объекта, полученные путем, задания различных вели чин скоростей относительного движения изображений объекта и регистрат ра; на фиг. 4 - фотограммы объекта, полученные путем задания различных масштабов изображений, на фиг. 5 фотограммы объекта, полученные путе задания р азличных направлений векто tj ров сдвига;, на фиг. 6 - схема полу чения модифицированных проекций пространственно-временного объекта, Стрема (фиг, 1) для реализации способа получения изображений объекта 1, изменяющегося во времени, содержит входной объектив 2 и трехканальпый мультипликатор, образованный полупрозрачныьш отражательными элементами 3 и 4. При этом первый канал А, образованньй мультипликатором содержит расположенные последовател но по ходу луча глухое зеркало 5, промежуточный объектив 6 и регистра тор 7. Второй канал Б содержит расп ложенные последовательно по ходу лу ча промежуточный объектив 8 и регистратор 9. Третий канал В содержит глухое зеркало 10, промежуточньш объектив 11 и регистратор 12. В кач стве отражательных элементов 3 и 4 могут быть использованы полупрозрач ные зеркала, призмы,, в качестве регистраторов 7, 9 и 12 - устройства, обеспечивающие относительньй сдвиг изображения объекта и регистрирующе го материала, например, фотохроногр оптико-механическогоJ электронно-оп тического или другого типа. Элементы 1, 7, 9 и 12 должны иметь цепи 1 синхронизации, (на фиг. 1 показаны пунктиром), Способ осуществляют следующим образом. Излучение от объекта 1 сфорйированное в квазипараллельный пучок. объективом 2, направляют на мультипликатор, где полупрозрачными зеркалами 3 и 4 пучок разделяют по трем каналам А, Б и В. В первом канале А излучение, пройдя глухое зеркало 5 и промежуточный объектив 6, поступает в регистратор 7, с помощью которого осуществляют взаимньй сдвиг изображения объекта и регистрирующей среды, например, путем задания скорости вращения зеркала фотохронографа V, и получают фотограмму - промежуточные изображения объекта,На втором канале Б излучениена регистратор 9 направляют с помощью промежуточного объектива 8. С помощью регистратора 9 осуществляют сдвиг изображения, например, путем задания скорости вращения зеркала фотохронографа V.. В третьем канале В излучение на регистратор 12 направляют с помощью глухого зеркала 10 и промежуточного объектива 11. В регистраторе 12 задается скорость вращения зеркала V, Различные режимы работы регистраторов 7, 9 и 12 обеспечивают получение различных значений вектора сдвига изображений объекта относительно регистрирующей среды, при этом значения величин скоростей относительного движения изображений объекта и регистрирующей среды отличаются от канала к каналу. Способ предусматривает также возможность получения различных значений вектора сдвига изображений объекта относительно регистрирующей среды и другими путями, например, путем задания масштабов изображений, различаю.щихся от канала к каналу. Получение различных значений вектора сдвига изображения о.бъекта относительно регистрирующей среды посредством задания различных величин скоростей {V,, V, V,) относительного движения изображений объекта и регистрирующей среды от канала к каналу дает картину промежуточных изображений, приведенную на фиг. 3, причем моменты времени t , t , t соответствуют трем стадиям изменений двумерного объекта в координатной системе с пространственными Х5 -осями и временной осью t (фиг. 2). Реальный же непрерьгоно изменяющийся объект.даст на регистрирующем материале непрерывное смазанное изображение. Показанные на фиг. 4 фотограммы объекта съемки получены путем задания вектора сдвига различными масшта бами,- причем фотограмма, полученная в первом канале А, соответствует мас штабу М, во втором канале Б - масштабу М , в третьем канале В - масштабу М . Для создания указанных масштабов изображений используются промежуточные объективы 6, 8 и 11 (фиг. 2) с различными фокусными расстояними, при этом режимы работы фоторегистраторов 7, 9 и 12 должны бьггь одинаковы. На фиг. 6 показан вариант, соглас но которому обеспечение различных значений вектора сдвига изображения объекта относительно регистрирующей среды путем задания различных направ лений ( f, Ч ) вектора сдвига от ка нала к каналу может быть достигнуто введением в каналы А, Б и В призм До ве или их аналогов. По полученным та ким образом в каждом канале фотограм мам с учетом обеспеченных указанными путями различных значений векторов сдвига восстанавливают набор последо вательных изображений объекта 1 в произвольные моменты времени, исполь зуя математический аппарат метода томографии. При этом задаются следующие параметры:L L - размер кадра-, Т - полная длительность исследуемого процесса, (X, У) - декартова система 1ГосфДинат в плоскости регистрируемого изображения или объекта; f(x, у, t) - функция, описывающая свойства объекта, например, яркость излучения; 1 (х, у, Vj) - функ-ция, описывающая изображение на регистрирующей среде в J-OM канале. Предполагается также, что движение изображения в плоскости регистрирующей среды j-ro канала является равномерным со скоростью V, а его направление совпадает с осью X. Тогда j-oe промежуточное изображение 1j (х, у), фиксируемое на регистрирующей среде, получается в виде 1(х,у,у.) |J(x-V.-t,y,t)dt. (О Если рассматривать изображения при некотором у const, то вьфажение (1) совпадает с используемой в математическом аппарате метода томографии модифицированной проекцией функции f(x,y,t) под углом Т- , описываемой величиной 87. Ф ( ) И f(x,y,t)6 (р-х X X cos Mj - 1: Sin у ) d X d t, где p и ф - параметры нормального уравнения прямой, характеризующие направление проекции. Заменяя в этом выражении р на X - cosVj и интегрируя по х, получим cos (х.созЧ,у,Ф) ; f(x - t. tgf, y,t)d t . (2) Левая часть вьфажения (2) и является модифицированной проекцией, т.е. проекцией, зарегистрированной в плоскости, параллельной оси X. Из сравнения выражений (1) и (2) .следует, что , х ф(х,У,Ч.) СОВЧ COSHj tg Ч-, ) где tg Vj . Таким образом, зная набор фотограмм 1 (х, у, Vj) при различных скоростях развертки V. , по выражению (3) можно преобразовать их в набор проекций, полученных при различных углах зондирования Hj трехмерного пространственно-временного объекта f(x, у, t). Задача.получения покадровых изображений сводится тем самым к задаче получения томограмм (в различные моменты времени t ), которые и представляют собой искомые изображения объекта. Так как скорость развертки V ограничена, то и диапазон углов Ч. будет ограничен. В этом случае можно воспользоваться алгоритмами восстановлениА томограмм по ограниченным данным. Все предыдущие математические выкладки представленыв безразмерных координатах, нормированных на длительность процесса Т и размер кадра L. Схема получения модифицировандатх проекций пространственно-временного объекта f(x, у, t), изображенного на фиг, 6 (ось Y перпендикулярна плоскости рисунка)5 на которой выелены временные сечения (кадры) при t с,- и отдельно показано их смещеие на регистрирующей среде, следуюая. Величина смещения i-ro кадра авна tj tgy, .где Ч, р - параметры ормального уравнения прямой в плосости (х, t), которое записывается в виде X cos У + t -sin Ч - Р 0. На фиг. 6 эта прямая изображена пунктирной линией, откуда следует, что tgH. равен относительной величине смещения кадра за время длительности процесса Т. В размерных координатах tg Ч; f где Дх - абсолютная величина смещения кадра за время длительноети процесса Т. Следовательно, смещение на один кадр, т.е. лх - L, соответствует углу проекции 45, величину .V3L -. уга смещение лу 4j 60 J Для восстановления изображения используются три проекции (соответствующие трем каналам). Обычно для углов О (Vj .0) и Ч ±60° (V ±ч, что достаточно для получения изображения хорошего качества, при этом в качестве априорной информа ции используется ограниченность пространственной и временной области задания объекта и его положительность. Томографическая обработка промежуточных изображений получаемых при изменении найравления вектора сдвига (фиг. 5), аналогична обработке проекций известными методами. Формула изобретения К Способ получения изображения объекта, заключакяцийся в том, что. объект проецируют в плоскость регистрации, фиксируют изменение объекта на регистрирукищй материал во времени путем задания вектора сдвига изоб ражения объекта относительнб регистрирующего материала, получают фотограмму объекта, после чего аосстанав пивают изображение объекта в произвольные моменты времени с учетом векгора сдвига, отлича ющийся тем, что, с целью повьппения качества изображения путем увеличения полного числа кадров за время экспонирования, объект проецируют в плоскость регистрации одновременно по нескольким каналам, фиксируют изменения объекта на регистрирующий материал путем задания вектора сдвига изображения объекта относительно регистрирующего материала, отличакядегося от канала к каналу, а изображение объекта в произвольньй момент времени восстанавливают с учетом вектора сдвига в каждом , используя метод томографин. 2. Способ по п. 1, отличающийся тем, что отличающийся от канала к каналу вектор сдвига изображения объекта относительно регистрирующего материала задают посредством величин скоростей относительного перемещения в каждом канале изображения объекта и регистрирующего материала. .: 3. Способ по п. 1,отличаю щ и и с я тем, что отличающийся от канала к каналу вектор сдвига изображения объекта относительно регистрирующего материала задают йосредством масштаба изображений в каждом канале. 4. Способ по п. 1, отличаю щ и й,с я тем, что отличающийся от канала к каналу вектор; сдвига изображения объекта относительно регистрирующего материала задают посредством направления вектора сдвига в каждом канале.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИЧЕСКОЙ ТОМОГРАФИИ ТРЕХМЕРНЫХ МИКРООБЪЕКТОВ И МИКРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2145109C1 |
| Оптическая система для высокоскоростной фотографической камеры | 1980 |
|
SU901985A1 |
| Устройство для измерения голографических характеристик фоторегистрирующих сред | 1984 |
|
SU1254428A1 |
| Способ измерения пространственного распределения внутренних неоднородностей объекта | 1981 |
|
SU999808A1 |
| ВЫСОКОСКОРОСТНАЯ КАМЕРА | 1973 |
|
SU371554A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ПОСЛЕДОВАТЕЛЬНОСТИ КАДРОВ ИЗОБРАЖЕНИЯ С РАЗЛИЧНЫМИ ВЫДЕРЖКАМИ И ПРОИЗВОЛЬНЫМИ ЗАДЕРЖКАМИ МЕЖДУ КАДРАМИ | 2008 |
|
RU2385544C1 |
| Адаптивная оптическая следящая система с контуром опережающей коррекции | 2023 |
|
RU2799987C1 |
| СПОСОБ ИНТЕРФЕРЕНЦИОННОЙ МИКРОСКОПИИ | 2013 |
|
RU2536764C1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ | 2016 |
|
RU2638580C1 |
| Устройство для измерения пространственного распределения оптических неоднородностей объекта | 1979 |
|
SU789679A1 |
Изобретение относится к способам высокоскоростной Съемки и воспроизведений изображения и может быть использовано при исследованиях быстропротекающих процессов. Цель изобретения - повьшение качества изображения путем увеличения полного числа кадров за время экспонирования. Сформированный объективом 2 квазипарал- , лельньй лучей направляют полупрозрачными зеркалами 3 и 4 мультипликатора по трем каналам. Осуществляют с помощью регистраторов 7, 9 и 12 взаимный сдвиг изображения объекта 1 и регистрирующей среды, отличающийся от канала к каналу, и получают фотограмму - промежуточные изображения объекта. Различные значения вектора сдвига изображения могут быть заданы посредством различных величин скоростей относительного дви5кения с (О изображения объекта и регистрирующей среды, либо масштаба изображений, либо направления.вектора сдвига в каждом канале. 3 з.п..ф-ль1, 6 ил.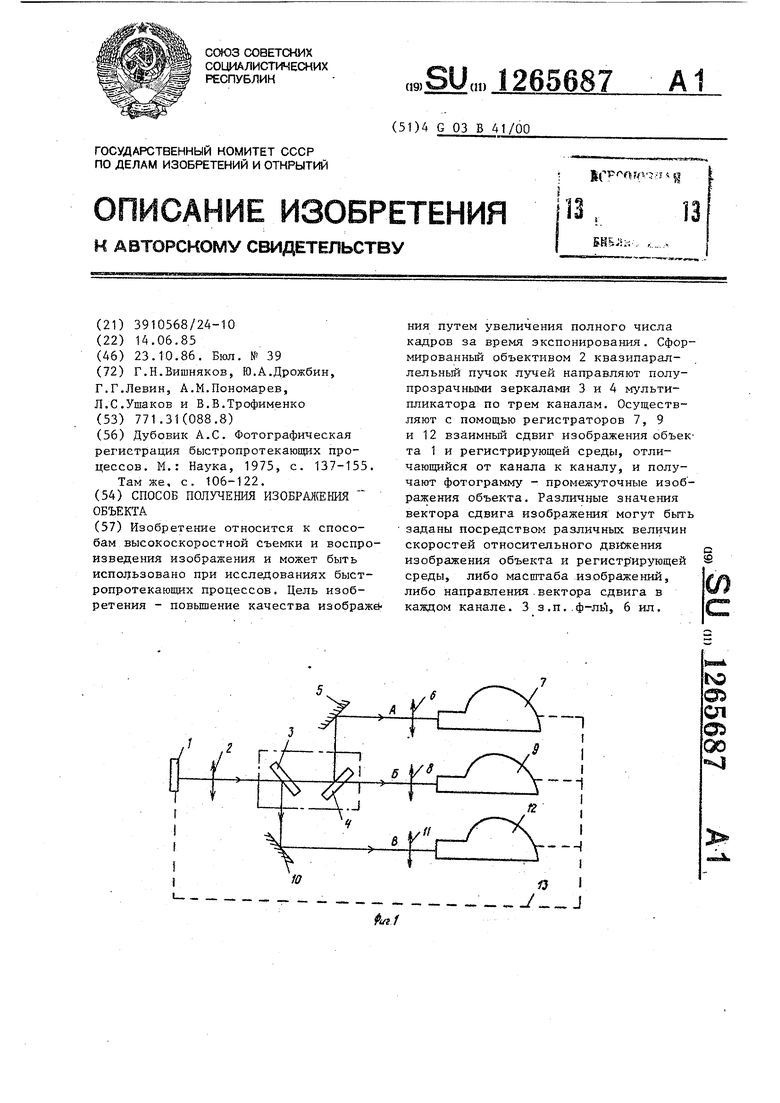
П,
| Дубовик А.С | |||
| Фотографическая регистрация быстропрстекаюащх процессов | |||
| М.: Наука, 1975, с | |||
| Способ приготовления строительного изолирующего материала | 1923 |
|
SU137A1 |
| Там же, с | |||
| Светоэлектрический измеритель длин и площадей | 1919 |
|
SU106A1 |
