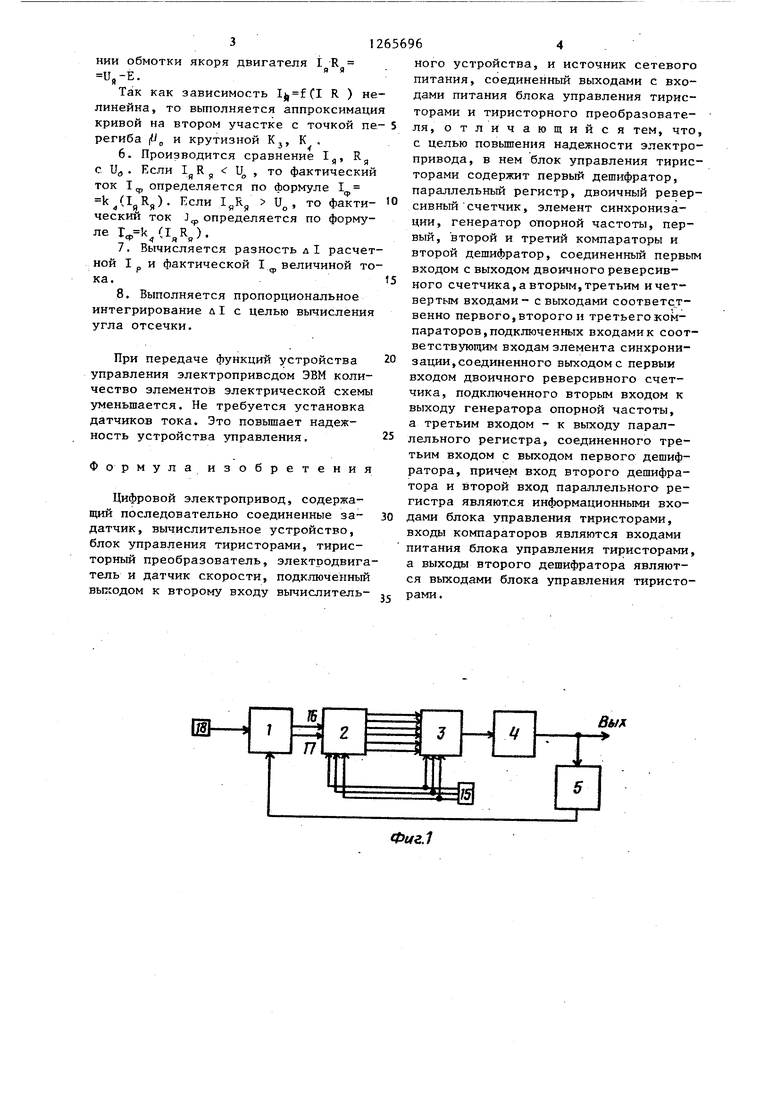
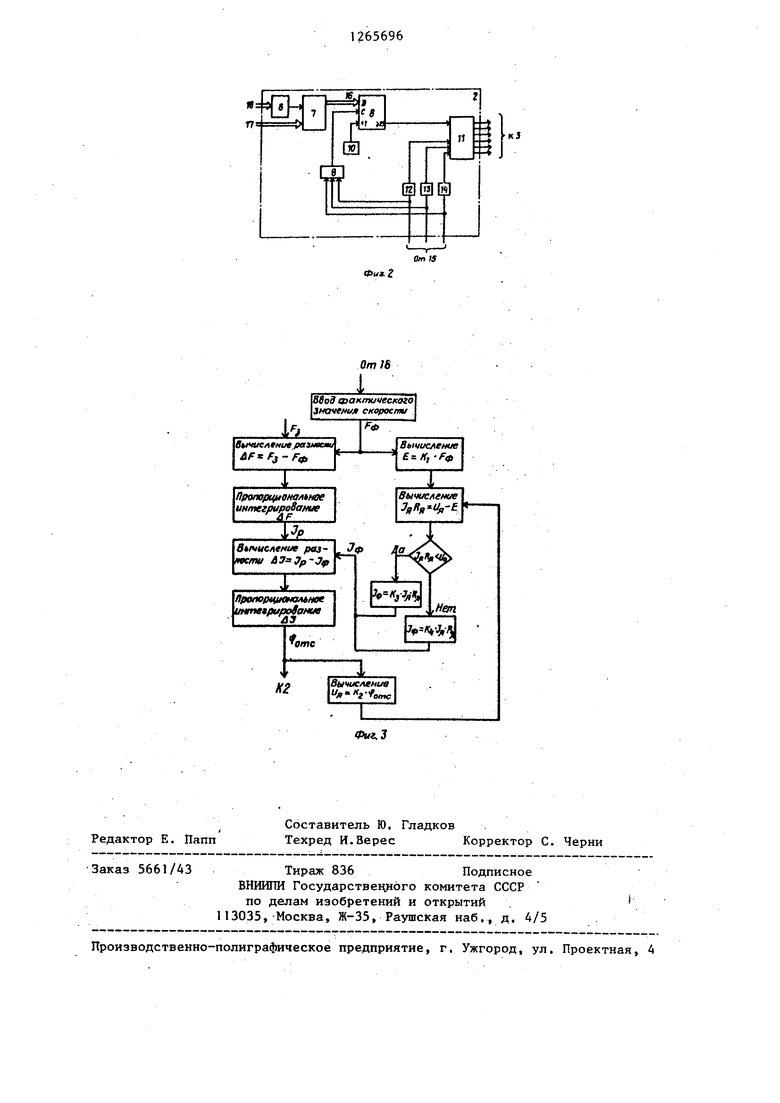
Изобретение относится к станкостроению и может найти применение в станках с числовым программным управ лением. Цель изобретения - повышение надежности электропривода. На фиг,1 представлена структурная схема электропривода; на фиг.2 структурная схема блока управления тиристорами; на фиг.З - структурная схема алгоритма вычислительного устройства. Схема электропривода, содержит вы.числительное устройство 1 (ЦВМ или микропроцессор) ,блок 2 управления тиристорами, тиристорный преобразователь 3, электродвигатель 4 (постоянного тока), датчик .5 скорости (фотоэлектрический или индукционный), пер вый дешифратор 6, параллельный ре- гистр 7, двоичный реверсивный счетчи 8, элемент 9 синхронизации, генератор 10 опорной частоты, второй дешиф ратор 1, первый, второй и третий компараторы 12-14, источник 15 сетевого питания, первый и второй входы 16 и 17 блока 2 управления тиристора ми, задатчик 18, На фиг.З и FJ - фактическое и заданное значения скорости, ДР - раз ность, заданного и фактического значе ний скорости, Е - ЭДС самоиндукции, К, К-, К , К - коэффициент пропорциональности, и, 1д, Кд напряжение, ток и сопротивление обмотки яко ря двигателя 4, I р и 1 р - расчетная и фактическая величины тока двигатеотс угол отсечки. Блок 2 управления тиристорами (фиг.2) содержит первый дешифратор 6 вход которого соединен с первым входом блока 2 управления тиристорами, а выход соединен с первым входом 16 параллельно регистра 7, второй t вход которого соединен с вторым входом 17 блока 2 управления тиристорами, а :выход соединен с третьим входом двЬичного реверсивного счетчика 8, первый вход которого соединей с выходом элемента 9 синхронизации, а второй вход - с выходом генератора 10 опорной частоты, выход двоичного реверсивного счетчика 8 соединен с первым входом второго дешифратора 1 второй, третий и четвертый входы ко торого соединены соответственно с вы ходами первого, второго и третьего компараторов 12-14, входь которых соединены соответственно с первым, вторым и третьим входами элемента 9 синхронизации, входами питания блока 2 управления тиристорами, выходы которого соединены соответственно с соответствующими выходами второго дешифратора 1 1 . Электропривод работает следующим образом. Исходя из задания управления движением объекта, вычислительное устройство 1 определяет заданную скорость перемещения объекта. Вычислительное устройство 1, имея информацию о заданной скорости перемещения РЗ фактической скорости перемещения Fq,, рассчитывает величину угла отсечки 4 , которая в виде параллельного кода записывается в блоке 2 управления тиристорами по его второму входу I7, а по его первому входу 16 указывается код адреса. Блок 2 управления тиристорами дешифрирует выходной сигнал вычислительного устройства 1 и в зависимости от фазы напряжения питания выделяет импульс подзкига на соответствующие тиристоры тиристорного преобразователя 3. Напряжение с тиристорного преобразова- . теля 3 подается на электродвигатель 4. Датчик 5 скорости измеряет скорость вращения двигателя 4, преобразует сигнал в параллельный код и пеТредает его на вход вычислителя 1 . Вычисление угла отсечки Ч выполнено согласно алгоритму, представленному на фиг.З, и реализованному в вычислительном устройстве 1. 1.Вычисляется л F разность заданного F, и фактического F значений 3ф скорости перемещения. 2.Выполняется пропорциональное интегрирование и F с целью определения расчетной величины 1 тока якоря. 3.Исходя из значения фактической скорости перемещения F вычисляется ЭДС самоиндукции Е по формуле , F, где k , - коэффициент пропорциональности. 4.Исходя из величины угла отсечки Ч , вычисленной в цредьщущем такте, определяется напряжение U на обмотке якоря двигателя 4 по формуле коэффициент пропорциональности. 5.Вычисляется величина падения напряжения на внутреннем сопротивлеНИИ обмотки якоря двигателя I R и,-Е. Так как зависимость Ij,fCI R ) не линейна, то выполняется аппроксимаци кривой на втором участке с точкой пе региба (Од и крутизной Kj, К , 6. Производится сравнение I. и„ с и,, . Если то фактический ток I jp определяется по формуле I ). Если и„, то фактический ток J определяется по формуле ). 7. Вычисляется разность дI расчет ной IP и фактической 1 величиной то ка. 8. Выполняется пропорциональное интегрирование и I с целью вычисления угла отсечки. При передаче функций устройства управления электроприводом ЭВМ количество элементов электрической схемы уменьшается. Не требуется установка датчиков тока. Это повьшает надежность устройства управления. Формулаизобретения Цифровой электропривод, содержащий последовательно соединенные задатчик, вычислительное устройство, блок управления тиристорами, тиристорный преобразователь, электродвига тель и датчик скорости, подключенный вьпсодом к второму входу вычислительного устройства, и источник сетевого питания, соединенный выходами с входами питания блока управления тиристорами и тиристорного преобразователя, отличающийся тем, что, с целью повьшения надежности электропривода, в нем блок управления тиристорами содержит первый дешифратор, параллельный регистр, двоичный реверсивный счетчик, элемент синхронизации, генератор опорной частоты, первый, второй и третий компараторы и второй дешифратор, соединенный первым входом с выходом двоичного реверсивного счетчика, а вторым, третьим и четвертым входами- с выходами соответс.твенно первого, второго и третьего компараторов, подключенных входами к соответствующим входам элемента синхронизации, со единенного выходом с первый входом двоичного реверсивного счетчика, подключенного вторым входом к выходу генератора опорной частоты, а третьим входом - к выходу параллельного регистра, соединенного третьим входом с выходом первого дешифратора, приче м вход второго дешифратора и второй вход параллельного регистра являются информационными входами блока управления тиристорами, входы компараторов являются входами питания блока управления тиристорами, а выходы второго дешифратора являются выходами блока управления тиристорами.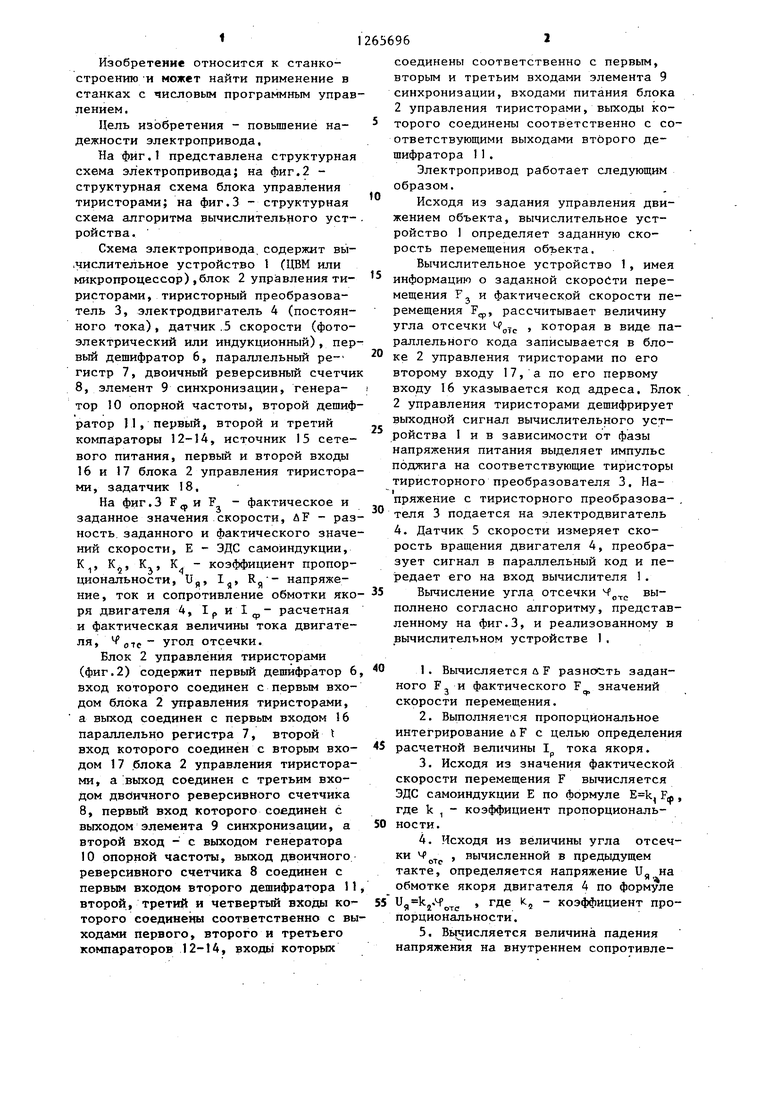
| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| Система числового программного управления | 1986 |
|
SU1386963A1 |
| Цифровая система управления источником питания | 1984 |
|
SU1236423A1 |
| Устройство для автоматического переключения однофазных нагрузок в низковольтных распределительных сетях | 1981 |
|
SU1026234A1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2012 |
|
RU2496228C1 |
| Автоматическое устройство для формирования и испытания химического источника тока | 1983 |
|
SU1112446A1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1307521A1 |
| Устройство для регулирования температуры | 1979 |
|
SU792225A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2011 |
|
RU2461948C1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
Изобретение относится к области станкостроения и может найти применение в станках с числовым программным .управлением. Целью изобретения является повьтёние надежности электропривода. Цифровой электропривод содержит вычислительное устройство, блок управления тиристорами, тиристорный преобразователь, электродвигатель, датчик скорости, дешифраторы, параллельный регистр, двоичный реверсивный счетчик, элемент синхронизации, генератор опорной частоты, компараторы, источник сетевого питания и задатчик. Вычислительное устройство (может быть ЭВМ) работает в соответствии с представленным алгоритмом. В электроприводе функции устройства управления им переданы ЭВМ, при этом количество элементов электрической с схемы уменьшается. Не требуется уста-® (Л новка датчиков тока. Это повышает надежность устройства управления, а следовательно, и самого цифрового электропривода. 3 ил. IND О5 ел О) ;о 9д
ш-
Фиг.1
| Следящие приводы | |||
| Под ред | |||
| Б.К.Чемоданова | |||
| - М.: Энергия, 1976, кн | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бессекерский В.А | |||
| и Попов Е.П | |||
| Теория систем автоматического управления | |||
| - М.: Наука, 1972, с.695-716 | |||
| Иващенко Н.Н | |||
| Автоматическое регулирование, - М.: Машиностроение, 1978, с.543-545. | |||
