00 СХ5 Од
со
Од СлЭ
113
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления для автоматизации процесса раскладки проводов в жгуты.
Цель изобретения - сокращение в объеме оборудования системы.
На фиг,1 приведена структурная электросхема системы числового программного управления; на фиг.2 - вариант выполнения системы, общий вид; на фиг.З - вариант выполнения вычислителя; на фиг.4 - вариант выполнения блока управления следящим приводом; на фиг.5 - вариант выполнения комплектного тиристорного электропривода; на фиг.6 - осциллограмма сигналов систем- - числового программного управ- ления.
Система числового программного устройства содержит устройство 1 числового программного управления, вычислитель 2 и трехкоординатный блок
3управления следящим приводом, канал
4положения и канал 5 скорости по каждой из координат, комплектный ти- ристорный электропривод 6 и электродвигатель 7, тахогенератор ,8, датчик 9 обратной связи, каретки 10 и 11 перемещения соответственно по координатам X и Y, электродвигатель 12, рабочий орган 13, триггеры 14 и 15, усилители 16 и 17, элемент ИЛИ 18, счетчик 19 импульсов, переключатель 20, согласующий элемент 21 и элемент 22 задержки.
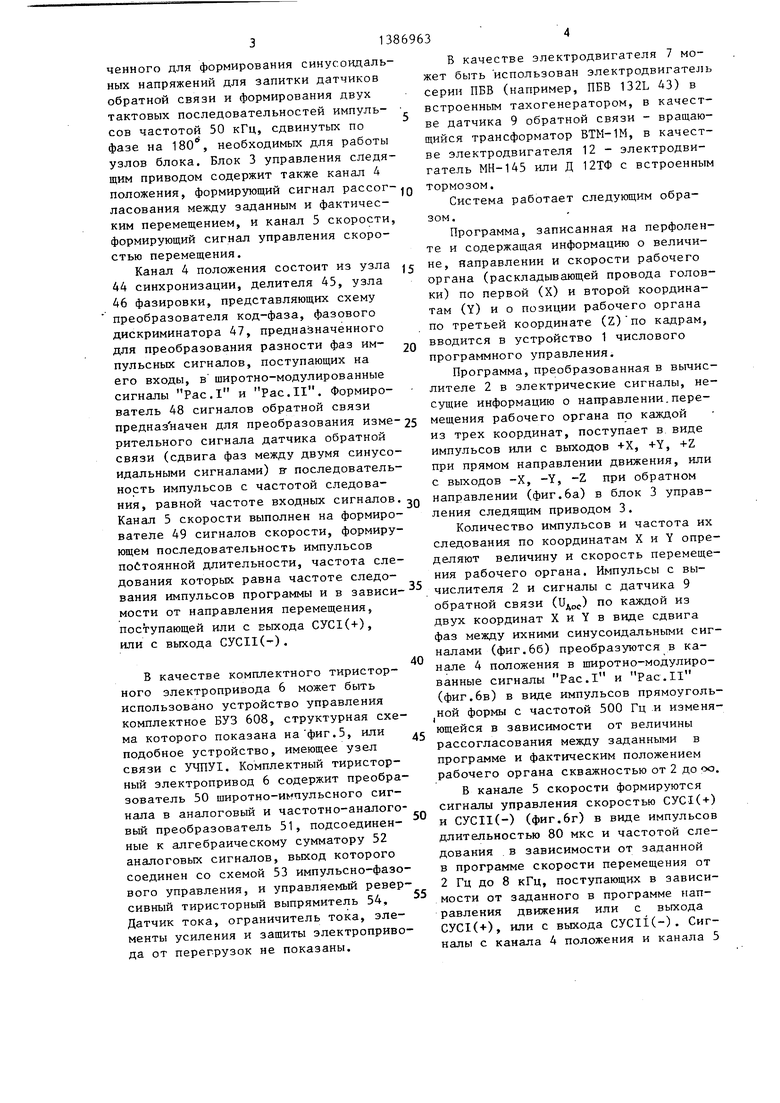
В качестве примера конкретного выполнения системы числового програм- много выполнения рассматривается вариант выполнения устройства для рас- кладки проводов в жгуты (фиг.2).
На монтажном столе 23 установлена каретка 10 с возможностью перемещения
по координате X от двигателя 7 . На каретке 10 установлена каретка 11 с возможностью перемещения по координате Y от двигателя 7 . Электродвигатель 12, жестко закрепленный на ка- ретке 11, связан с рабочим органом 13 (раскладывающим пальцем), который установлен с возможностью перемещения по координате Z. Внутри раскладывающего пальца 13 проходит провод 24, сматываемый с катушки 25, расположенной на каретке 11. Элементы 14-22 управления электродвигателем 12 расположены на плате 26, которая подклю0
5 0
5
0
0
5
5,
Q
чена к устройству 1 числового программного управления.
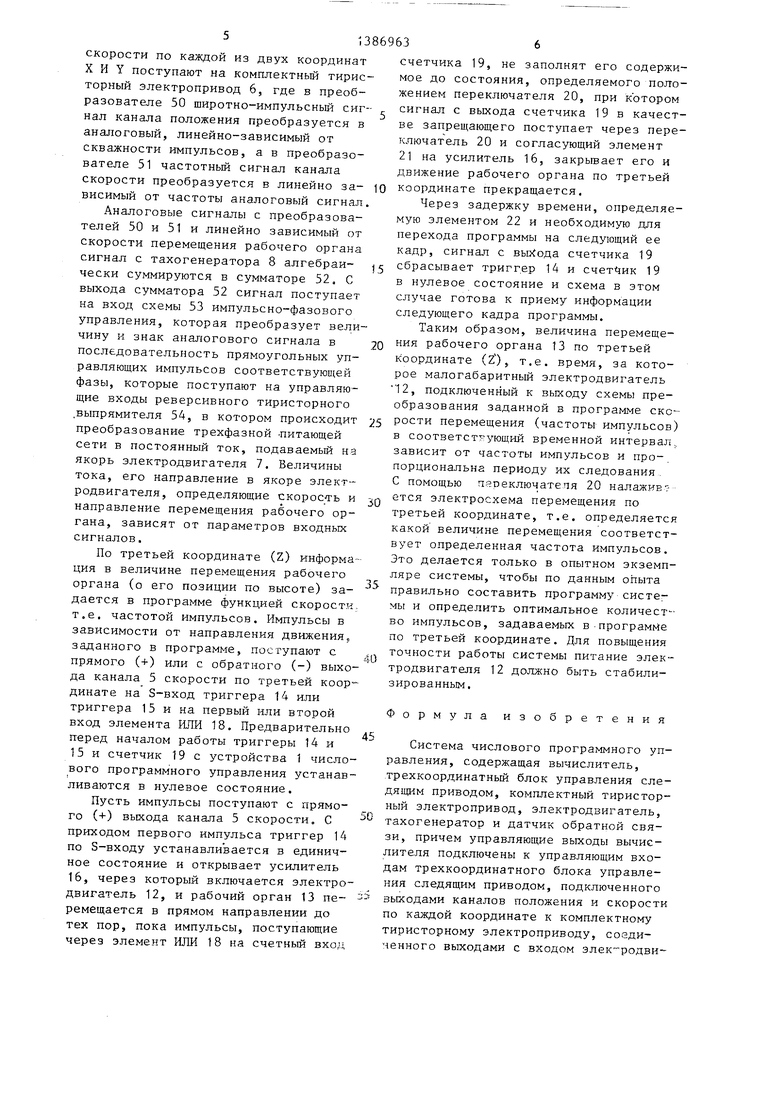
Структурная схема вычислителя 2 (фиг.З) содержит фотосчитывающее устройство (ФСУ) 27 для считывания кодированной информации с перфоленты и формирования электрических импульсов, регистр 28 ввода, соединенный с выходом ФСУ 27, для хранения информации одной строки перфоленты и проверки ее на четность, регистр 29 адреса, где адресная информация, поступающая с регистра 28 ввоДа, хранится на время прохождения числовой информации, следующей за ним, дешифратор 30 адреса для расшифровки адреса с регистра 29 адреса, регистр-преобразователь 31 для хранения числовой информации подачи координат XY, поступающей с регистра 28 ввода, и преобразования ее из двоично-десятичного кода в двоичный, устройство 32 управления для управления вычислителем 2 в различных режимах работы, для тактования работы всех узлэз вычислителя 2 и выработки номера строк, схему 33 управл :; ния для пуска и останова ФСУ 27, узел 34 приема информации для приема информации о подаче и режимах скоростей с регистра 31 преобразователя, памяти 35 скоростей, перезапись в которую происходит в начале обработки нового кадра, интегратор 36 для преобразования скорости, заданной в мм/мин, в .соответствующую частоту импульсов, узел 37 разгона - торможе-. ния, связанный с генератором 38 разгона-торможения, блок 39 поддержания постоянства контурной скорости, блок 40 формирования выходных импульсов, узел 41 формирования 6 функций, который определяет режим работы интерполяции (линейной и круговой), и интерполятор 42, служащий для обработки геометрической информации, ее хранения на время обработки предшествующих кадров и выдачи в соответствии с кодированной числовой информацией определенного числа импульсов по координатам X,Y на блок 3 управления следящим приводом.
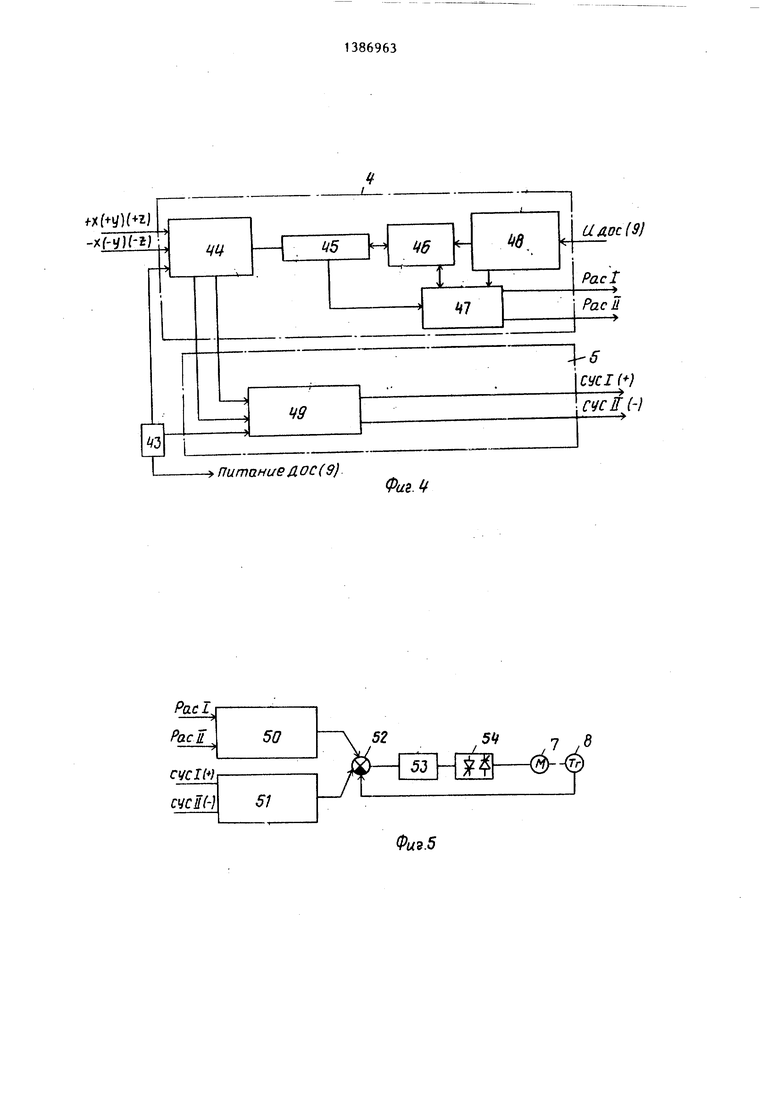
Структурная схема блока 3 управления следящим приводом (фиг.4) показана для одной координаты, аналогичный состав блока для каждой из других двух координат, кроме генератора 43 тактовых импульсов, являющегося общим для всех координат и предн,. значенного для формирования синусоидальных напряжений для запитки датчиков обратной связи и формирования двух тактовых последовательностей импульсов частотой 50 кГц, сдвинутых по фазе на 180, необходимых для работы узлов блока. Блок 3 управления следящим приводом содержит также канал 4
9634
В качестве электродвигателя 7 может быть использован электродвигатель серии ПБВ (например, ПЕВ 132L 43) в встроенным тахогенератором, в качестве датчика 9 обратной связи - вращающийся трансформатор ВТМ-1М, в качестве электродвигателя 12 - электродвигатель МН-145 или Д 12ТФ с встроенным
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ МНОГОКООРДИНАТНОГО ЭЛЕКТРОПРИВОДА СВАРОЧНОГО АВТОМАТА | 2002 |
|
RU2233465C1 |
| Копировальное следящее устройство для станков с программным управлением | 1982 |
|
SU1070508A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Устройство для управления следящим приводом | 1985 |
|
SU1278810A1 |
| Устройство для позиционного управления | 1983 |
|
SU1124257A1 |
| Устройство для программного управления | 1987 |
|
SU1462251A1 |
| Устройство для задания программы | 1986 |
|
SU1327062A1 |
| Многоканальный интерполятор для программного управления многокоординатным станком | 1978 |
|
SU746429A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления оборудованием, в частности в машиностроении для автоматизации процесса раскладки проводов в жгуты, в установках для сварки и окраски неплоских поверхностей различных изделий и в других трехкоординатных устройствах с программным управлением. Цель изобретения состоит в сокращении оборудования. Введение в канал скорости по третьей координате триггеров 14 и 15, усилителей- 16 и 17, элемента ИЛИ 18, счетчика 19 импульсов, переключателя 20, согласующего -элемента 21 и элемента 22 задержки времени, образующих схему преобразования заданной в программе скорости перемещения, позволяет сократить оборудование в два раза. 6 ил. i (Л
положения, формирующий сигнал paccor
ласования между заданным и фактическим перемещением, и канал 5 скорости формирующий сигнал управления скоростью перемещения.
Канал 4 положения состоит из узла 44 синхронизации, делителя 45, узла 46 фазировки, представляющих схему преобразователя код-фаза, фазового дискриминатора 47, предназначенного для преобразования разности фаз импульсных сигналов, поступающих на его входы, в широтно-модулированные сигналы Рас.1 и Рас.II. Формирователь 48 сигналов обратной связи
предназ начен для преобразования изме-25 мещения рабочего органа по каждой рительного сигнала датчика обратной связи (сдвига фаз между двумя синусоидальными сигналами) вг последовательность импульсов с частотой следоваиз трех координат, поступает в вид импульсов или с выходов +Х, +Y, +Z при прямом направлении движения, и с выходов -X, -Y, -Z при обратном
ния, равной частоте входных сигналов. ,Q направлении (фиг.ба) в блок 3 управ 35
Канал 5 скорости выполнен на формирователе 49 сигналов скорости, формирующем последовательность импульсов постоянной длительности, частота следования которых равна частоте следования импульсов программы и в зависи мости от направления перемещения, поступающей или с выхода СУС1(+), или с выхода СУС11(-).
40
В качестве комплектного тиристорного электропривода 6 может быть использовано устройство управления комплектное ВУЗ 608, структурная схема которого показана на фиг.5, или дс подобное устройство, имеющее узел связи с УЧПУ1. Комплектный тиристор- ный электропривод 6 содержит преобразователь 50 широтно-иь пульсного сигнала в аналоговый и частотно-аналоговый преобразователь 51, подсоединенные к алгебраическому сумматору 52 аналоговых сигналов, выход которого соединен со схемой 53 импульсно-фазо- вого управления, и управляемый реверсивный тиристорный выпрямитель 54, Датчик тока, ограничитель тока, элементы усиления и защиты электропривода от перегрузок не показаны.
50
55
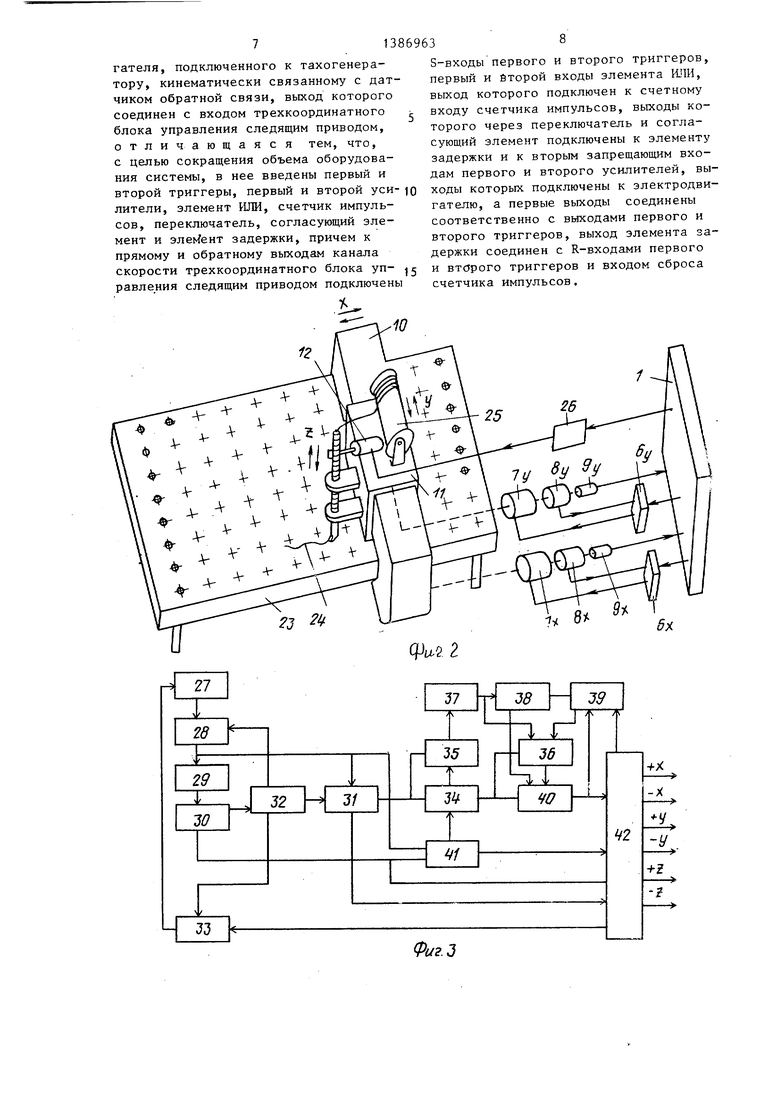
ления следящим приводом 3.
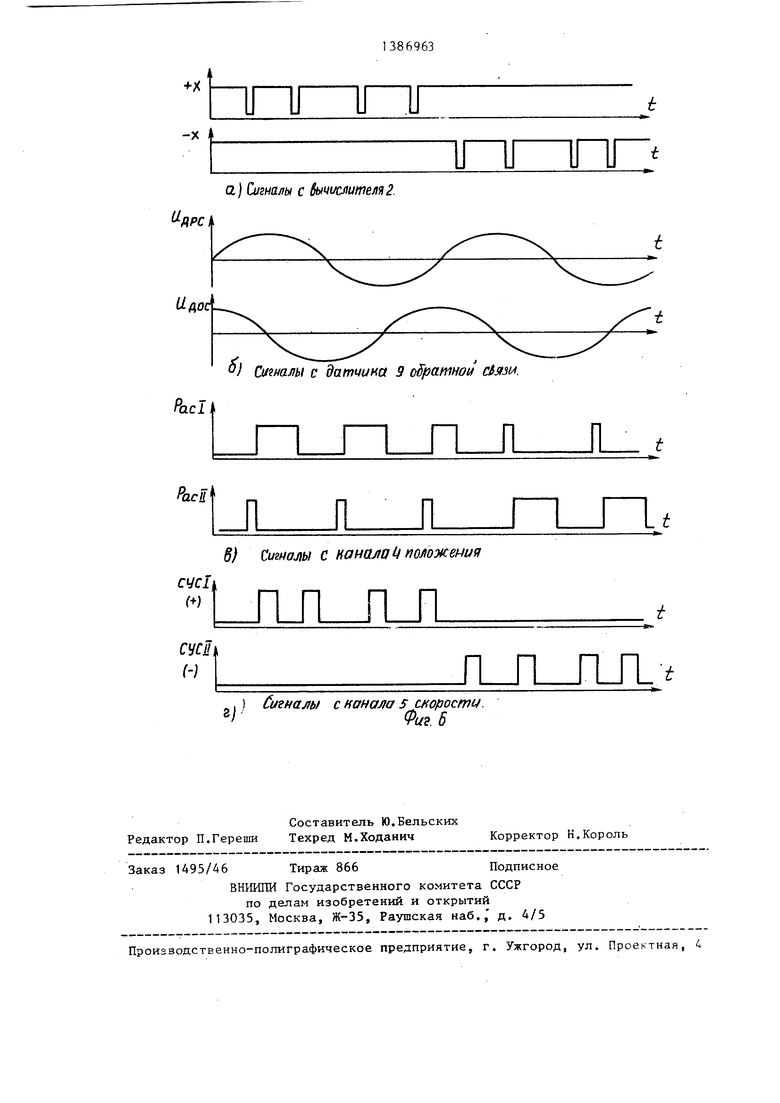
Количество импульсов и частота их следования по координатам X и Y определяют величину и скорость перемещения рабочего органа. Импульсы с вычислителя 2 и сигналы с датчика 9 обратной связи (идо) по каждой из двух координат X и Y в виде сдвига фаз между ихними синусоидальными сигналами (фиг.бб) преобразуются в канале 4 положения в широтно-модулированные сигналы Рас.1 и Рас.II (фиг.бв) в виде импульсов прямоугольной формы с частотой 500 Гц и изменяющейся в зависимости от величины рассогласования между заданными в программе и фактическим положением рабочего органа скважностью от 2 до оо.
В канале 5 скорости формируются сигналы управления скоростью СУС1(-ь) и СУС11(-) (фиг.бг) в виде импульсов длительностью 80 икс и частотой следования в зависимости от заданной в программе скорости перемещения от 2 Гц до 8 кГц, поступающих в зависимости от заданного в программе направления движения или с вьгхода СУС1(+), или с выхода СУС11(-). Сигналы с канала 4 положения и канала 5
тормозом,
Система работает следующим образом.
Программа, записанная на перфоленте и содержащая информацию о величине, направлении и скорости рабочего органа (раскладывающей провода головки) по первой (X) и второй координатам (Y) и о позиции рабочего органа по третьей координате (Z) no кадрам, вводится в устройство 1 числового программного управления.
Программа, преобразованная в вычислителе 2 в электрические сигналы, несущие информацию о направлении.перемещения рабочего органа по каждой
из трех координат, поступает в виде импульсов или с выходов +Х, +Y, +Z при прямом направлении движения, или с выходов -X, -Y, -Z при обратном
,Q направлении (фиг.ба) в блок 3 управ35
40
дс50
55
ления следящим приводом 3.
Количество импульсов и частота их следования по координатам X и Y определяют величину и скорость перемещения рабочего органа. Импульсы с вычислителя 2 и сигналы с датчика 9 обратной связи (идо) по каждой из двух координат X и Y в виде сдвига фаз между ихними синусоидальными сигналами (фиг.бб) преобразуются в канале 4 положения в широтно-модулированные сигналы Рас.1 и Рас.II (фиг.бв) в виде импульсов прямоугольной формы с частотой 500 Гц и изменяющейся в зависимости от величины рассогласования между заданными в программе и фактическим положением рабочего органа скважностью от 2 до оо.
В канале 5 скорости формируются сигналы управления скоростью СУС1(-ь) и СУС11(-) (фиг.бг) в виде импульсов длительностью 80 икс и частотой следования в зависимости от заданной в программе скорости перемещения от 2 Гц до 8 кГц, поступающих в зависимости от заданного в программе направления движения или с вьгхода СУС1(+), или с выхода СУС11(-). Сигналы с канала 4 положения и канала 5
скорости по каждой из двух координат X И Y поступают на комплектньй тирис- торный электропривод 6, где в преобразователе 50 широтно-импульсный сигнал канала положения преобразуется в аналоговый, линейно-зависимый от скважности импульсов, а в преобразователе 51 частотньш сигнал канала скорости преобразуется в линейно зависимый от частоты аналоговый сигнал. Аналоговые сигналы с преобразователей 50 и 51 и линейно зависимый от скорости перемещения рабочего органа сигнал с тахогенератора 8 алгебраически суммируются в сумматоре 52, С выхода сумматора 52 сигнал поступает на вход схемы 53 импульсно-фазового управления, которая преобразует величину и знак аналогового сигнала в последовательность прямоугольных управляющих импульсов соответствующей фазы, которые поступают на управляющие входы реверсивного тиристорного
.выпрямителя 54, в котором происходит 5 Рости перемещения (частоты импульсов)
преобразование трехфазной -питающей сети в постоянный ток, подаваемьй на якорь электродвигателя 7. Величины тока, его направление в якоре электродвигателя, определяющие скорость и направление перемещения рабочего органа, зависят от параметров входных сигналов.
По третьей координате (Z) информация в величине перемещения рабочего
30
в соответствующий временной интервал зависит от частоты импульсов и про-, порциональна периоду их следования. С помощью папеключатепя 20 налажив ется электросхема перемещения по третьей координате, т.е. определяетс какой величине перемещения соответст вует определенная частота импульсов. Это делается только в опытном экземпляре системы, чтобы по данным опыта
органа (о его позиции по высоте) за- правильно составить программу сиетедается в программе функцией скорост.к т.е. частотой импульсов. Импульсы в зависимости от направления движения, заданного в программе, поступают с прямого (+) или с обратного (-) выхода канала 5 скорости по третьей координате на S-вход триггера 14 или триггера 15 и на первый или второй вход элемента ИЛИ 18. Предварительно перед началом работы триггеры 14 и 15 и счетчик 19 с устройства 1 числового программного управления устанавливаются в нулевое состояние.
Пусть импульсы поступают с прямого (+) выхода канала 5 скорости, С приходом первого импульса триггер 14 по S-входу устанавливается в единичное состояние и открывает усилитель 16, через который включается электродвигатель 12, и рабочий орган 13 перемещается в прямом направлении до тех пор, пока импульсы, поступающие через элемент ИЛИ 18 на счетный вход
869636
счетчика 19, не заполнят его содержимое до состояния, определяемого положением переключателя 20, при котором сигнал с выхода счетчика 19 в качестве запрещающего поступает через переключатель 20 и согласующий элемент 21 на усилитель 16, закрывает его и движение рабочего органа по третьей
10 координате прекращается.
Через задержку времени, определяемую элементом 22 и необходимую для перехода программы на следующий ее кадр, сигнал с счетчика 19
J5 сбрасывает триггер 14 и счетчик 19 в нулевое состояние и схема в этом случае готова к приему информации следующего кадра программы.
Таким образом, величина перемеще2Q ния рабочего органа 13 по третьей координате (Z ), т.е. время, за которое малогабаритный электродвигатель 12, подключенный к выходу схемы преобразования заданной в программе ско0
в соответствующий временной интервал,, зависит от частоты импульсов и про-, порциональна периоду их следования. С помощью папеключатепя 20 налажив ется электросхема перемещения по третьей координате, т.е. определяется какой величине перемещения соответствует определенная частота импульсов. Это делается только в опытном экземпляре системы, чтобы по данным опыта
5
мы и определить оптимальное количест- во импульсов, задаваемых в-программе по третьей координате. Для повыщения точности работы системы питание электродвигателя 12 должно быть стабилизированным.
Формула изобретения
Система числового программного управления, содержащая вычислитель, .трехкоординатньш блок управления следящим приводом, комплектный тиристорный электропривод, электродвигатель, тахогенератор и датчик обратной связи, причем управляющие выходы вычислителя подключены к управляющим входам трехкоординатного блока управления следящим приводом, подключенного выходами каналов положения и скорости по каждой координате к комплектному тиристорному электроприводу, соединенного выходами с входом элек-родвигателя, подключенного к тахогенера- тору, кинематически связанному с датчиком обратной связи, выход которого соединен с входом трехкоординатного блока управления следящим приводом, отличающаяся тем, что, с целью сокращения объема оборудования системы, в нее введены первый и второй триггеры, первый и второй уси-ю лители, элемент ИЛИ, счетчик импульсов, переключатель, согласующий элемент и задержки, причем к прямому и обратному выходам канала скорости трехкоординатного блока уп- j равления следящим приводом подключены
t
10
S-входы первого и второго триггеров, первый и йторой входы элемента ИЛИ, выход которого подключен к счетному входу счетчика импульсов, выходы которого через переключатель и согласующий элемент подключены к элементу задержки и к вторым запрещающим входам первого и второго усилителей, выходы которых подключены к электродвигателю, а первые выходы соединены соответственно с выходами первого и второго триггеров, выход элемента задержки соединен с R-входами первого и второго триггеров и входом сброса счетчика импульсов.
Фиг.З
fXH))
-хйШШ
- Питание ДОС(9)
50
51
и ДОС (9)
СУС1 () СУСКН
(PuZ.Lf
а) Сигналы с ёычислителя2.
а
fiod
) Сигналы с датчына 9 обратной
6} Сигналы С нанамо момжеиия
„,) Сигналы с напала 5 скорости, fФи. 6
П
JL
| Устройство для программного управления электродвигателем | 1981 |
|
SU1010598A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
