Изобретение относится к электротехнике, в частности к электропри- вЪдам постоянного тока с цифровым управлением.
Целью изобретения является увеличение быстродействия и точности регулирования.
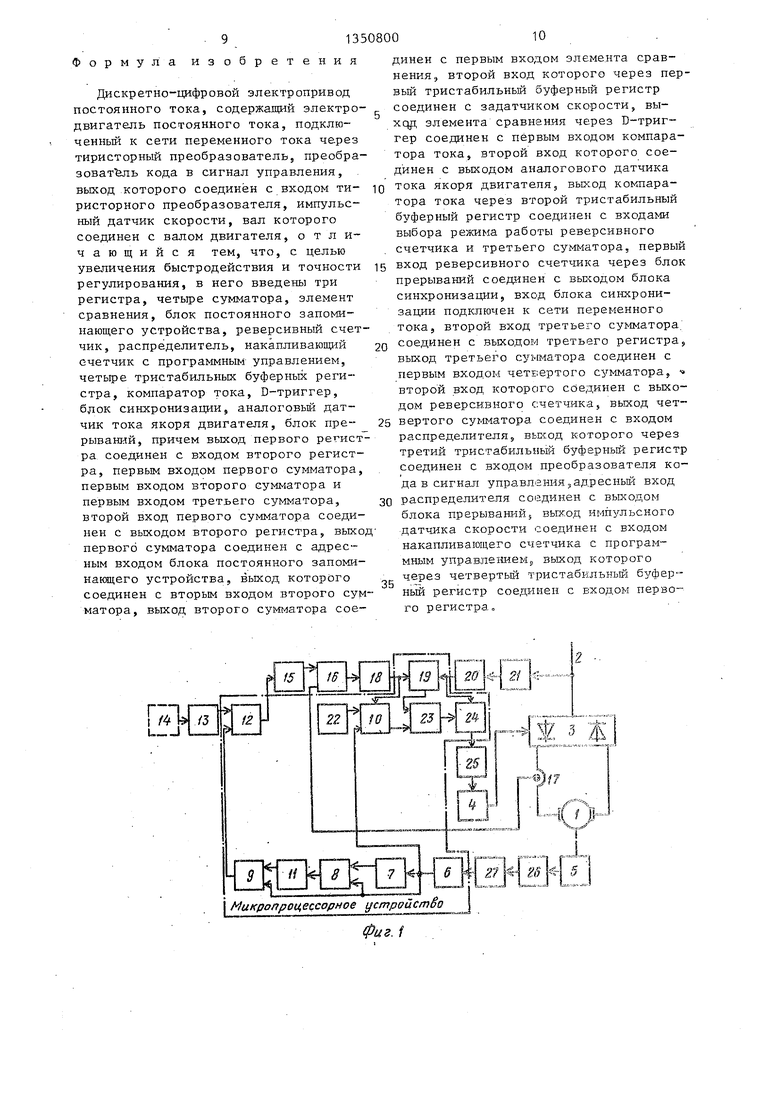
На фиг. 1 представлена блок-схема дискретно-цифрового электропривода постоянного тока-, на фиг. 2 - функциональная схема блока синхронизации, на фиг. 3 - функциональная схема блока прерываний; на фиг, 4 - функченного к сети 2 переменного тока. .Второй вход третьего сумматора 10 соединен с выходом третьего регистра 22. Выход третьего суь-шатора 10 соединен с первым входом четвертого сумматора 23, второй вход которого соединен с выходом реверсивного счетчика 19. Выход четвертого сумматора 23 -JQ соединен с входом распределителя 24, выход которого через третий триста- бильный буферный регистр 25 соединен с входом преобразователя 4 кода в сигнал управления. Адресный вход расциональная схема преобразователя кода ig пределителя 24 соединен с выходом бло20
30
35
в сигнал управления5 на фиг. 5 - кривые переходных процессов, где I разгон двигателя в системе пропорционального регулирования, II - то же, в дискретно-и;ифровом электроприводе.
Дискретно-цифровой электропривод .содержит электродвигатель 1 постоянного тока, подключенньй к сети 2 переменного тока через тиристорный преобразователь 3, преобразователь 4 кода в сигнал управления, выходом соединенный с входом тиристорного преобразователя 3 и и fflyльcный датчик 5 скорости, вал которого соединен с валом электродвигателя 1„ Кроме того, электропривод содержит первый регистр 6, выход которого соединен с входом второго регистра 7 и первыми входами первого 8, второго 9 и третьего 10 сумматоров. Второй вход первого сумматора 8 соединен с выходом второго регистра 7, выход первого сумматора 8 подключен к адресным входам блока 11 постоянного запоминающего устройства, выходом соединенного с вторым входом сумматора 9, Выход второго сумматора 9 соединен с первым входом элемента 12 сравнения, второй вход которого через первый тристабиль- ный буферный регистр 13 соединен с задатчиком 14 скорости. Выход элемента 12 сравнения через D- триггер 15 соединен с первым входом компаратора
16тока, второй вход которого подсоединен к выходу аналогового датчика gg
17тока якоря электродвигателя. Выход компаратора 16 тока через второй тристабильный буферный регистр 18 соединен с входами выбора режима работы реверсивного счетчика 19 и третьего сумматора 10. Первьш вход реверсивного счетчика 19 через блок
20 пpepывaшiй соединен с выходом блока 21 синхронизации, входом подклюка 20 прерываний. Выход импульсного датчика 5 скорости соединен с входом накапливающего счетчика 26 с программным управлением, выход JcoToporo через четвертый тристабильньй буферный регистр 27 соединен с входом первого регистра 6.
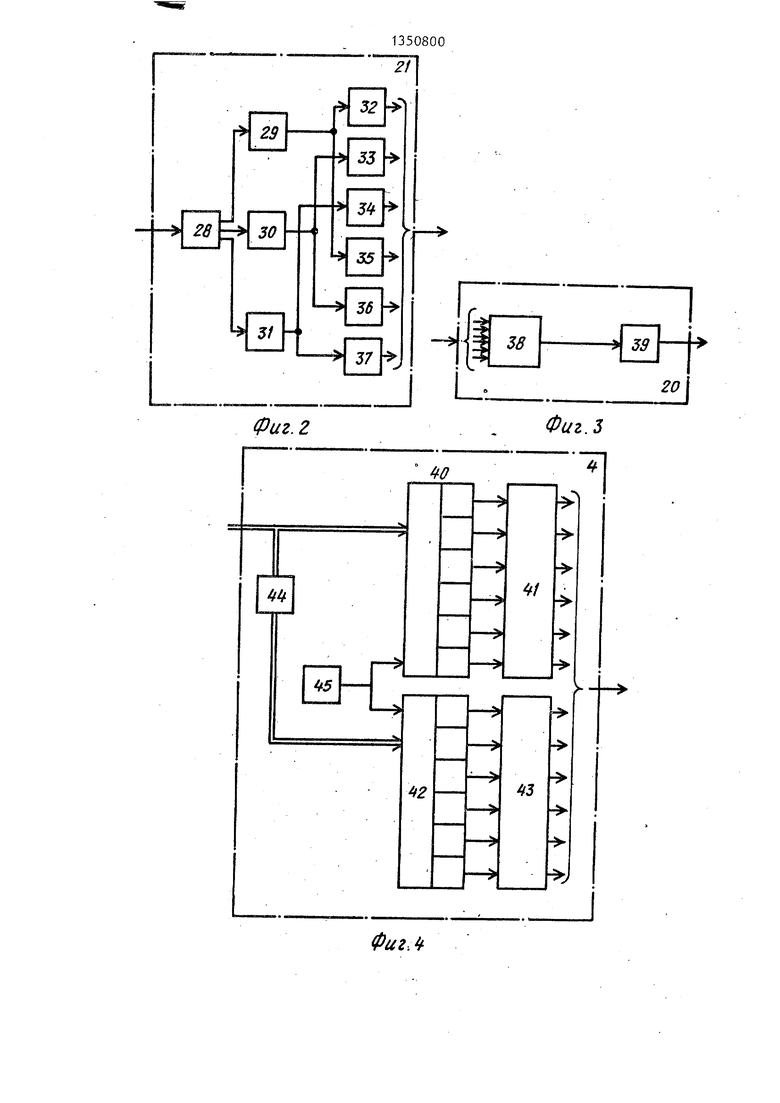
Блок 21 синхронизации (фиг, 2) со- дерлшт трехфазный синхронизирующий 25 трансформатор 28j первичные обмотки которого подключены к сети 2 перемен- ного тока, три коьшаратора 29-31, рходы которьт соединены с соответствующими втopичны Ш обмотками трехфазного синхронизгфующего трансформатора 28, три формирователя 32-34 импульсовJ реагирующие на положительные перепады входного напряжения, и три .формирователя 35-37 им пульсов, реагирующие на отрицательные перепады входного напряясения 5 причем входы формирователей 32 и 35 импульсов соединены с выходом компаратора 29, fexo- ды формирователей 33 и 36 - с выходом компаратора 30, а входы формирователей 34 и 37 импульсов - с выходом компаратора 31. Выходы формирователей 32-37, И1 шульсов образуют шестика- .нальныйг выход блока 21 си хронизации.
Блок 20 прерываний (фиг, 3) содержит шестиканальньвл узел 38 форг-шрова- ния запросов на прерывание и регистр 39 формирования команд вызова подпрограмм прерываний, причем шестика- нальный вход узла 38 формирования запросов на прерывание соединен с шес- тиканальным выходом блока 21 синхронизации, а трехразрядньш выход - с входом регистра 39 фор1 1к:рования команд вызова подпрограг м прерываний.
Преобразователь 4 кода в сигнал управления (фиг. 4) содержит блок 40 таймеров положительной группы тиристоров с согласуюшдми элементами 41,
40
45
55
508002
ченного к сети 2 переменного тока. .Второй вход третьего сумматора 10 соединен с выходом третьего регистра 22. Выход третьего суь-шатора 10 соединен с первым входом четвертого сумматора 23, второй вход которого соединен с выходом реверсивного счетчика 19. Выход четвертого сумматора 23 -JQ соединен с входом распределителя 24, выход которого через третий триста- бильный буферный регистр 25 соединен с входом преобразователя 4 кода в сигнал управления. Адресный вход расg пределителя 24 соединен с выходом бло0
0
5
g
ка 20 прерываний. Выход импульсного датчика 5 скорости соединен с входом накапливающего счетчика 26 с программным управлением, выход JcoToporo через четвертый тристабильньй буферный регистр 27 соединен с входом первого регистра 6.
Блок 21 синхронизации (фиг, 2) со- дерлшт трехфазный синхронизирующий 5 трансформатор 28j первичные обмотки которого подключены к сети 2 перемен- ного тока, три коьшаратора 29-31, рходы которьт соединены с соответствующими втopичны Ш обмотками трехфазного синхронизгфующего трансформатора 28, три формирователя 32-34 импульсовJ реагирующие на положительные перепады входного напряжения, и три .формирователя 35-37 им пульсов, реагирующие на отрицательные перепады входного напряясения 5 причем входы формирователей 32 и 35 импульсов соединены с выходом компаратора 29, fexo- ды формирователей 33 и 36 - с выходом компаратора 30, а входы формирователей 34 и 37 импульсов - с выходом компаратора 31. Выходы формирователей 32-37, И1 шульсов образуют шестика- .нальныйг выход блока 21 си хронизации.
Блок 20 прерываний (фиг, 3) содержит шестиканальньвл узел 38 форг-шрова- ния запросов на прерывание и регистр 39 формирования команд вызова подпрограмм прерываний, причем шестика- нальный вход узла 38 формирования запросов на прерывание соединен с шес- тиканальным выходом блока 21 синхронизации, а трехразрядньш выход - с входом регистра 39 фор1 1к:рования команд вызова подпрограг м прерываний.
Преобразователь 4 кода в сигнал управления (фиг. 4) содержит блок 40 таймеров положительной группы тиристоров с согласуюшдми элементами 41,
0
5
55
блок 42 таймеров отрицательной групп тиристоров с согласующими элементами 43, инвертирующий буфер 44 и тактовый генератор 45. Причем блок 40 таймеров положительной группы тиристоров подключен к шине данных непосредственно, а блок-42 таймеров отрицательной группы тиристоров - через инвертирующий буфер 44. Выходы блоков 40 и 42 таймеров обеих групп подключены к управляющим электродам тиристоров через согласующие элементы 41 и 43. Выход тактового генератора 45 соединен с тактовыми входами блоков 40 и 42 таймеров.
Электропривод работает- следующим образом.
По запросу на прерывание, формируемому блоком 21 синхронизации, код, 20 тотой следования стробирующих импульсов блока 21 синхронизации. Так как электродвигатель является фршьтром, а частота переключения велика, то колебания тока получаются исчезающе малыми, а среднее значение тока поддерживается на постоянном уровне.
Из принципа максимума Понтрягина следует, что для- оптимального управления при учете ограничений на нагрев ток должен изменяться по линейному закону с максимальным по модулю или нулевым темпом. При этом выходное напряжение U тиристорного преобразователя 3 должно изменяться в соответствии с выражением
ии КЛХ+ я1 + сопри (, ) и I,,co при (i;) О, (2) ,
35
пропорциональньм текущему значению скорости, из накапливающего счетчика 26 с программным управлением через четвертьш тристабильный буферный регистр 27 записывается в первый 25 регистр 6, При этом ранее хранимое в о первом регистре 6 значение скорости в предыдущий дискретный интервал времени переписывается- во второй регистр 7. Формирование кода, пропор- ЗО ционального скорости, осуществляется ,с помощью импульсного датчика 5 скорости, выходные импульсы которого суммируются в накапливающем счетчике 26 с программным управлением. Измерение скорости осуществляется по принципу подсчета числа импульсов в т.ечение фиксированных промежутков времени, формируемых с помощью блока 21 синхронизации.
Первый сумматор бвычисляет разность между текущим значением скорости и ее значением в предыдущий дискретный интервал времени. Код разности является адресом ячейки памяти блока 11 45 постоянного запоминающего устройства, в которой хранится код, пропорциональный квадрату производной от скорости. Этот код складьтается вторым сумматором 9 с кодом, пропорциональным ско- 50 рости в дискретный интервал времени, хранящемся в первом регистре 6. Код с выхода второго сумматора 9 подается на элемент .12 сравнения, где из него вычитается код задания N, посту- gg пающий через первый тристабильньй буферный регистр 13 от задатчика 14 скорости. Сигнал с выхода элемента 12 сравнения, несущий информацио о
40
где R,
Тл t
ktP, k(
Ih
активное сопротивление и постоянная времени якорной цепи;
-темп изменения тока якоря двигателя;
-время;
-постоянный коэффициент;
-ЭДС двигателя;
-максимальный ток двигателя.
Для формирования кода, соответствующего выходному напряжению U тиристорного преобразователя 3, необходимо вычислить алгебраическую сумму кодов, пропорциональных слагаемым правой части выражения (1). Причем первое слагаемое представляет собой постоянное число, не зависящее от режима работы тиристоршэго преобразнаке разности, поступает на вход D-триггера 15 и запоминается им. С выхода D-триггера 15 логический сиг- нал подается на вход компаратора 16 тока, где сравнивается с сигналом аналогового датчика 17 тока якоря двигателя. В зависимости от результа- та сравнения компаратор 16 тока фор-
мирует на своем выходе сигнал логического нуля или единицы, на основании которого должен формироваться код, соответствующий или положительному темпу изменения тока при логической
единице на выходе компаратора 16
тока, или отрицательному при логическом нуле. Нулевое значение темпа изменения тока формируется за счет переключения компаратора 16 тока с час35
25 о ЗО
25 о ЗО
40
где R,
Тл t
ktP, k(
Ih
активное сопротивление и постоянная времени якорной цепи;
-темп изменения тока якря двигателя;
-время;
-постоянный коэффициент
-ЭДС двигателя;
-максимальный ток двигателя.
Для формирования кода, соответствующего выходному напряжению U тиристорного преобразователя 3, необходимо вычислить алгебраическую сумму кодов, пропорциональных слагаемым правой части выражения (1). Причем первое слагаемое представляет собой постоянное число, не зависящее от режима работы тиристоршэго преобразователя, которое хранится в третьем регистре 22. Второе слагаемое это число, равное падению напряжения в якорной цепи двигателя и изменяющееся по линейному закону, поэтому код, пропорциональный этому числу, в течение каждого фиксированного интер- вала времени изменяется на постоянну величину, пропорциональную числу , где At - фиксированньй интервал времени. Код, пропорциональный этому слагаемому, формируется с помощью реверсивного) счетчика 19, на счетный вход которого поступают за- просы на прерывание от блока 20 прерываний. Если на вход выбора режима приходит логический нуль, реверсив- ньй счетчик 19 вычитает входные импульсы, если единица - суммирует.
Третье слагаемое представляет собой число, равное ЭДС двигателя. Так как двигатель работает без ослабления магнитного потока, код, пропорциональный третьему слагаемому, равен коду, хранящемуся в первом
регистре 6.
I
Третий сумматор 10 складывает коды
считанные из первого 6 и третьего 22 регистров..Если на вход выбора ре жима третьего сумматора 10 приходит сигнал логического нуля, то содерлси- мое третьего регистра 22 воспринимается с обратным знаком. Полученный код с выхода третьего сумматора 10 поступает на первый вход четвертого сумматора 23, где складывается с кодом, считанным из реверсивного счетчика 19.
Вычисленный код с выхода четверто То сумматора 23 через распределитель 24 и третий тристабильный буферный регистр 25 поступает в преобразователь 4 кода в сигнал управления,, где формируется, временной интервал, равный углу управления тиристорным, преобразователем 3.
Комбинация тиристоров, проводящих ток в данньш фиксированньй интервал времени, определяется командой вызона подпрограммы прерывания,, поступающей на адресный вход распределителя из блока 20 прерываний по запросам блока 21 синхронизации в моменты времени, соответствуюн1ие точ- кам естественной коммутации тиристоров. Причем число разрядов выхода блока 21 синхронизации равно числу тиристоров одной группы, а в каждом
разряде формируется логическая единица за исключением разряда, соответствующего данной комбинации проводящих тиристоров, на котором устанавливается логический нуль. Этот код с помощью блока 20 прерываний пробразуется в код команды вызова подпрограммы прерывания, определяющий комбинацию пррводящих тиристоров.
Блок 21 синхронизации (фиг. 2) фомирует стробирующие импульсы в моменты времени, соответствующие точкам естественной кo tt yтaщ-Iи тиристоров тиристорного преобразователя 3. Для этого в него введен синхронизируюпщй тра нсформатор 28,, первичные обмотки которого подключены к сети 2 переменного тока. Причем грзшпа соединения его обмоток должна обеспечивать отставание пО фазе на 30° яапряже- ния вторичнык обмоток по отношению к входному напряжению тиристорного преобразователя 3. Момент перехода напряжения вторичных обмоток синхронизирующего трансформатора 28 через нуль фиксируется компаратораь-ш 29- 31, выходные напряжения которьпс подаются на входы форь ирозателей импульсов. Причем формирователи 32-34 реагируют на полош-ггельный-перепад входного напряже.ния, а формирователи 35-37 - на отрицате.льньшо При поступлении с выхода блока 20 прёрылзакий команд вызова по7дпрогранм.ь прерывания,, формирователи 32-37 сбрасываются по входу Сброс 3 исходное состояни Импульсы напряжения с выходов формирователей 32-37 импу.пьсов посгл пают на вход, блока 20 прерываний,Блок 20 прерываний (фи:. 3)формирет команды вызова подпрограьшы формирования управляющих импульсов для группы тиристоровр который должны проводить ток в данный фиксированный интервал времени,
Центральньй npoiieccop может приня только один запрос на прерывание, а группа тиристоров,; которые должны проводить ток в данный фиксированный интервал времени; определяется по одному из шести запросов на прерывание, поступающих с выходов рователей 32--37 импульсов блока 21 синхронизапди, Поэ 1 ому необходимо использовать узел, осуществляющий формирование, команды вызова подпрограммы, соответствующей одному из шести запросов на прерывание,
С выхода блока 21 синхронизации на вход узла 38 формирования запросов на прерывание поступает код, число разрядов-которого равно числу тиристоров одной из групп тиристор- нрго преобразователя 3, В каждом разряде этого кода формируется сигнал логической единицы за исключением разряда, соответствующего данной ком бинации проводящих тиристоров. На выходе узла 38 формирования запросов на прерывание формируется трехбитовый код. Так как шина данных имеет в предлагаемом электроприводе восемь разрядов, трехбитовый код необходимо дополнить недостающими пятью разрядами, содержащими логические единицы. Эта операция производится в регистре 39 формирования команд вызова подпрограмм прерываний.
Преобразователь 4 кода в сигнал управления (фиг. 4) отсчитывает интервал времени, пропорциональный поступившему коду, а в конце интервала формирует импульс., управляющий парой тиристоров, которые должны проводить ток в данный фиксированный интервал времени. Максимальньш угол управления в реверсивном приводе составляет около 180°, причем в интервале 90° одна группа тиристоров выпрямляет ток, а вторая - работает в режиме инвертирования при согласованном управлении или блокируется при раздельном управлении. Пусть для режима выпрямления положительной группы тиристоров соответствует код X, тогда для режима инвертирования второй группы соответствует инверсный код X.
Код, соответствующий углу управления тиристорным преобразователем, через третий тристабильный буферный регистр записывается в блок 40 тай- меров положительной группы тиристоров. В блок 42 таймеров отрицательной группы тиристоров этот код записьшает ся через инвертирующий буфер 44. Причем при раздельном управлении работа одного из блоков таймеров блокируется распределителем. Блокируемый блок таймеров определяется по знаку слагаемого R из вьгражения (1) . Если знак положительный, работает положительная группа, а вторая блокируется, если отрицательный - наоборот.
Импульсы, поступающие с тактового генератора 45, декрементируют со
5
0
держимое таймеров. В момент равенст- ва нулю содержимого таймера на его выходе формируется импульс напряжения. Выходы блоков 40 и 42 таймеров обеих групп подключены к входам согласующих элементов 41 и 42, осуществляющих со- rnacoBat e с тиристорным преобразователем 3.
Накапливающий счетчик 26 (фиг.1) с программным управлением служит для подсчета числа импульсов, поступакщих от импульсного 5 датчика скорости за- фиксйрованньй интервал времени. После считывания из накапливающего счетчика 26 с программным управлением кода, пропорционального скорости привода, счетчик 26 программно сбрасывается в нуль. Так как таймер работает
на вычитание, его следует подключать к шине данных через инвертирующий буфер. Цоэтому первый тристабильный буферный регистр 13 в этом случае с должен быть инвертирующим. Разрешающая способность импульсного датчика . 5 скорости выбирается из условия, о что при максимальной скорости привода в течение фиксированного интервала времени накапливающий счетчик
0
26 не переполняется.
5
Прямой цифровой выход на тиристоры вентильного преобразователя, исключение промежуточных операций циф- роаналогового и аналого-цифрового преобразования, алгоритм управления и использование быстродействующего аналогового компаратора 16 тока обеспе- „ чивают формирование оптимальных по быстродействию переходных процессов при ограничении тока и его производной, нагрева- двигателя и малую статическую ошибку. Обеспечение неизменности по абсолютной величине темпа изменения тока якоря дает возможность исключить медленно изменяю- шзиеся участки кривой тока и сократить в 1,5-2,0 раза время переходных процессов как при управлении, так и
5
0
5
при приложении нагрузки (фиг. 5).
Увеличение быстродействия уменьшает динамическое падение скорости и энергетические потери на восстановление скорости. Динамическое падение скорости уменьшается в 2-3 раза при прежнем уровне максимального зна- ,чения темпа изменения тока якоря.
Формула изобретения
Дискретно-цифровой электропривод постоянного тока, содержащий электродвигатель постоянного тока, подключенный к сети переменного тока через тиристорный преобразователь, преобра зоватЪль кода в сигнал управления, , выход которого соединён с входом ти- ристорного преобразователя, импульсный датчик скорости, вал которого соединен с валом двигателя, отличающийся тем, что, с целью увеличения быстродействия и точности регулирования, в него введень три регистра, четыре сумматора, элемент сравнения, блок постоянного запоминающего устройства, реверсивный счетчик, распределитель, накапливающий Счетчик с программным управлением, четыре тристабильных буферных регистра, компаратор тока, D-триггер, блок синхронизации9 аналоговьй датчик тока якоря двигателя, блок пре- рывашлй, причем выход первого регистра соединен с входом второго регистра, первым входом первого сумматора, первым входом второго сумматора и первым входом третьего сумматора, второй вход первого сумматора соединен с выходом второго регистра, выхо первого сумматора соединен с адресным входом блока постоянного запоми- наклцего устройства, вь1ход которого соединен с вторым входом второго сумматора, выход второго сум1-1атора соеj Микрапрои,ессорное устройстбо фиг. 1
5
динен с первым входом элеме.нта сравнения, второй вход которого через первый тристабильньй буферный регистр соединен с задатчиком скорости, вы- хсуз; элемента сравнения через D-триггер соединен с первым входом компаратора тока, второй вход которого соединен с выходом аналогового датчика тока якоря двигателя, вькод компаратора тока через второй тристабильный буферный регистр соединен с входами выбора режима работы реверсивного счетчика и третьего сумматора, первый вход реверсивного счетчика через блок прерываний соединен с блока синхронизации, вход блока синхронизации подключен к сети переменного тока, второй вход третьего сумматора, соединен с выходом третьего регистра, выход третьего сумматора соединен с первым входом четвертого сумматора, второй вход которого соединен с выходом реверсивного счетчика, выход чет- 5 вертого суг матора соединен с входом распределителя5 которого через третий тристабильньй буферный регистр соединен с входом преобразователя кода в сигнал управления3адресный вход 0 распределителя соединен с выходом блока прерываний; выход импульсного датчика скорости соединен с входом накапливающего счетчика с программным управле шеМэ выход которого через четвертьш тристабкльньш буферный регистр соединен с входом первого регистра.
0
5
1350800 Б
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1983 |
|
SU1259458A1 |
| Электропривод постоянного тока | 1990 |
|
SU1798881A1 |
| Устройство для компенсации полного тока однофазного замыкания в коротких сетях | 1990 |
|
SU1777199A1 |
| Устройство для автоматического регулирования температуры | 1988 |
|
SU1645945A1 |
| УПРАВЛЯЮЩИЙ АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2001 |
|
RU2222028C2 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ ГАЛЬВАНИЧЕСКИХ ВАНН | 1998 |
|
RU2135647C1 |
| Устройство для регулирования температуры | 1987 |
|
SU1553959A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ВОССТАНОВЛЕНИЯ ТЕХНИЧЕСКИХ СРЕДСТВ МЕДИЦИНСКОГО НАЗНАЧЕНИЯ | 1992 |
|
RU2072788C1 |
| ЧАСТОТОМЕР ДЛЯ ЭНЕРГОСИСТЕМ И ЭЛЕКТРОСТАНЦИЙ ЕРМАКОВА-ФЕДОРОВА (ВАРИАНТЫ) | 2007 |
|
RU2362174C1 |
| Устройство таймеров | 1983 |
|
SU1163309A1 |

Изобретение относится к электротехнике, и м.б. использовано в электроприводах постоянного тока с цифровым управлением. Цель изобретения - увеличение быстродействия и точности регулирования. Электропривод содержит электродвигатель, подключенный к сети переменного тока через тиристорньй преобразователь и преобразователь кода в .сигнал управления. Блок синхронизации формирует стробирующие импульсы в моменты времеш-, соответствующие точкам естественной коммутации тиристоров преобразователя. Блок прерываний формирует команды вызова подпрограммы для подключения групп тиристоров, проводящих ток в фиксированный интервал времени. Прямой цифровой выход на тиристоры преобразователя, исключение промежуточных операций цифроаналогового и аналого- цифрового преобразования, алгоритм управления и использование быстродействующего аналогового компаратора тока обеспечивают формирование оптимальных по быстродействию переходных процессов при ограничении тока. и его производной, нагрева двигателя и малую статическую ошибку. 5 ил. i (Л со ел
- 29
30
5/
5tf
-
(Z
.2
Фаг.З
4/
-
43
-
-
-
- -
-
i
Фиг. 5
| Устройство для регулирования скорости электродвигателя постоянного тока | 1977 |
|
SU738080A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровой электропривод | 1981 |
|
SU1042149A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
