Недостатком известных систем подвеса подвижных катушек электродинамических сейсмоприемников является осуществление креплении подвижных пружин с помощью накладок и большого числа БИНТОВ. Применение винтов и резьбовых отверстий для них усложняет процесс производства, сборки и эксплуатации систем подвеса. Пружины в местах к-репления могут .сдвигаться при ударах, нарушая центровку катушек, что является причиной нестабильности работы сейсмоприемников.
Предлагаемая система подвеса для сейсмоприемников не имеет указанных недостатков. Достигается это в результате того, что подвесные пружины выполнены в виде плоских рычагов, расположенных между двумя направляюшпми кольцами, и закреплены с помощью кольцевой гайки в обойме, представляющей собой часть катушки. На корпусе сенсмоприемника пружины закреплены на втулке с помощью одного винта.
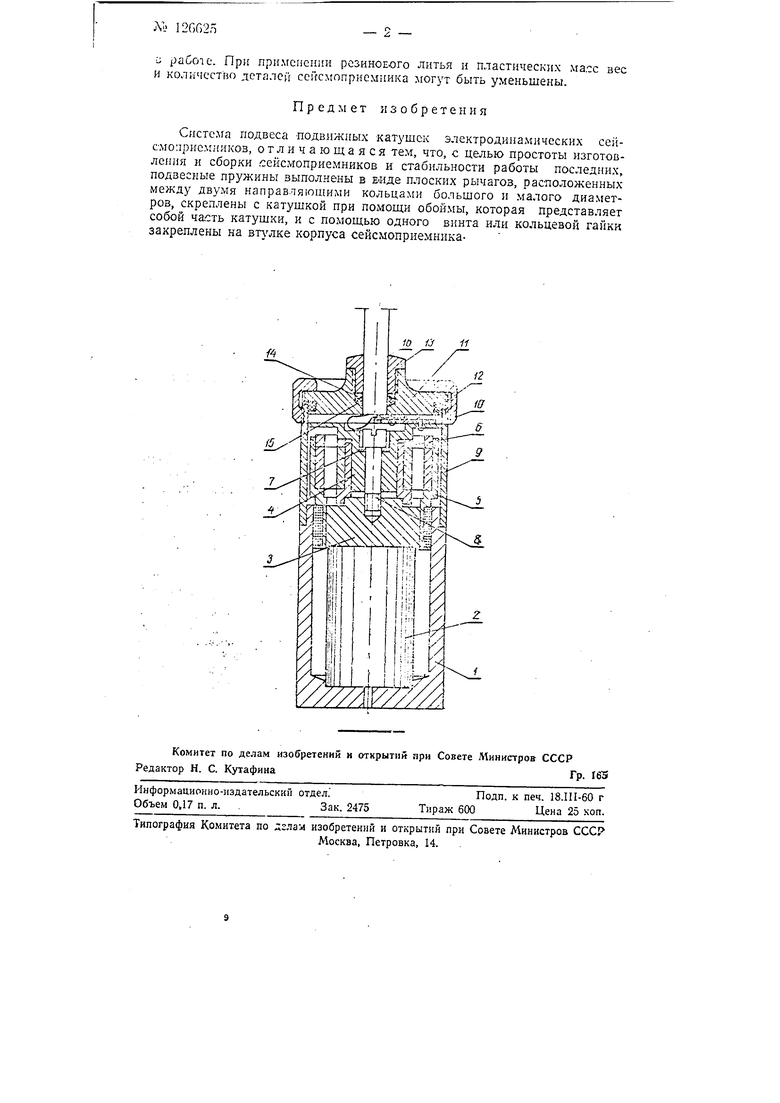
На чертеже изображен разрез сейсмоприе.мника с описываемой подвесной системой, здесь: 1 - магнитопровод, 2 - магнит и 5 - полюсной наконечник. Система подвеса включает: прижим 4 с платой, катушку 5 с обмоткой, подЕесные пружины, кольца между пружинами и кольцевую гайку, упорное кольцо 6, шайбу 7, винт 5, корпус .9, стяжное кольцо 10, крышку 11, резиновую прокладку 12, гайку 13, шайбу 14 сальника, резиновое кольцо 15 сальника и выводной шланг 16.
Система подвеса, собранная из деталей, сопрягающиеся размеры которых изготовлены по 3 кл. точности, дала возможность создать высокочувствительный, стабильный, достаточно легкий и дешевый разведочный -сейсмоприемник.
Изготовленные образцы сейс.моприемников с данной системой подвеса имеют следующие технические данные: КЭМС-б , собссгвенная частота 16 гЦ, размеры: диа.метр 35 мм, высота 85 мм, вес - 400 г. Сейсмоприемник имеет 28 деталей. Прост в изготовлении, надежен
АО 120Г)2п- 2 -
J. работе. При применении рсзиноЕОГо литья и пластических ма.сс вес и количество деталей сейсмоприемиика могут быть уменьшены.
Предмет изобретения
Систелга подвеса подвижных катушек электродинамических сейсмолрисмииков, отличающаяся тем, что, с целью простоты изготовления и сборки сейсмоприемников и стабильности работы последних, подвесные пружины выполнены в виде плоских рычагов, расположенных между двумя направляющими кольцами большого и малого диаметров, скреплены с катушкой при помощи обоймы, которая представляет собой ча,сть катушки, и с помощью одного винта или кольцевой гайки закреплены на втллке корпуса сейсмоприемника
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический низкочастотный сейсмоприемник | 1959 |
|
SU131102A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 1973 |
|
SU363059A1 |
| Электродинамический сейсмоприемник | 1982 |
|
SU1056105A1 |
| Электродинамический сейсмоприемник | 1979 |
|
SU918915A1 |
| Сеисмоприемник электродинамического типа | 1957 |
|
SU114198A1 |
| СЕЙСМОПРИЕМНИК | 1967 |
|
SU205320A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1965 |
|
SU168031A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1966 |
|
SU183978A1 |
| Устройство для натяжения провода к станкам для намотки электрических катушек | 1980 |
|
SU951431A1 |
| Сейсмоприемник | 1974 |
|
SU575592A1 |
