Изобретение относится к виброизмеритепьной технике и может быть использовано в сейсмическом приборостроении.
Известен сейсмоприемник, содержащий корпус, магнитную систему, подвилшую мае,су, соединенную с корпусом упругим подвесом, состоящим из ирисовых и цилиндрических пружин. Такой упругий подвес обладает малой жесткостью и большой поддерживающей силой, обеспечивая тяжелой подвижной массе низкую собственную частоту и заданное рабочее положение.
Описанный сейсмоприемник ; имеет су шественный недостаток. В силу нелинейности нагрузочных характеристик ирисовых пружив суммарная нагрузочная характеристика упругого подвеса также нёпинейна, что обуславливает значительную зависимость собственной частоты от положения подвижной массы, которое может измениться от многих причин, включая изменения температуры, даклон оси прибора, а также усталостные деформации в пружинах.
Целью изобретения является повышение стабильности обеспечения независимости соб
ственной частоты и затухаьия ccMicMouiineMjruKa от измеиепия угла его ycTajiODKii it температуры.
Посгавпениая цепь досгнгается тем, что на подвиичлой: массе и на корпусе се 1смоп 1иек(нпка установлены сооспо, по иапрагшеппю движения подвижной массы, iiocTosuiUbie магниты, обращенные друг к другу одноименными полюсами.
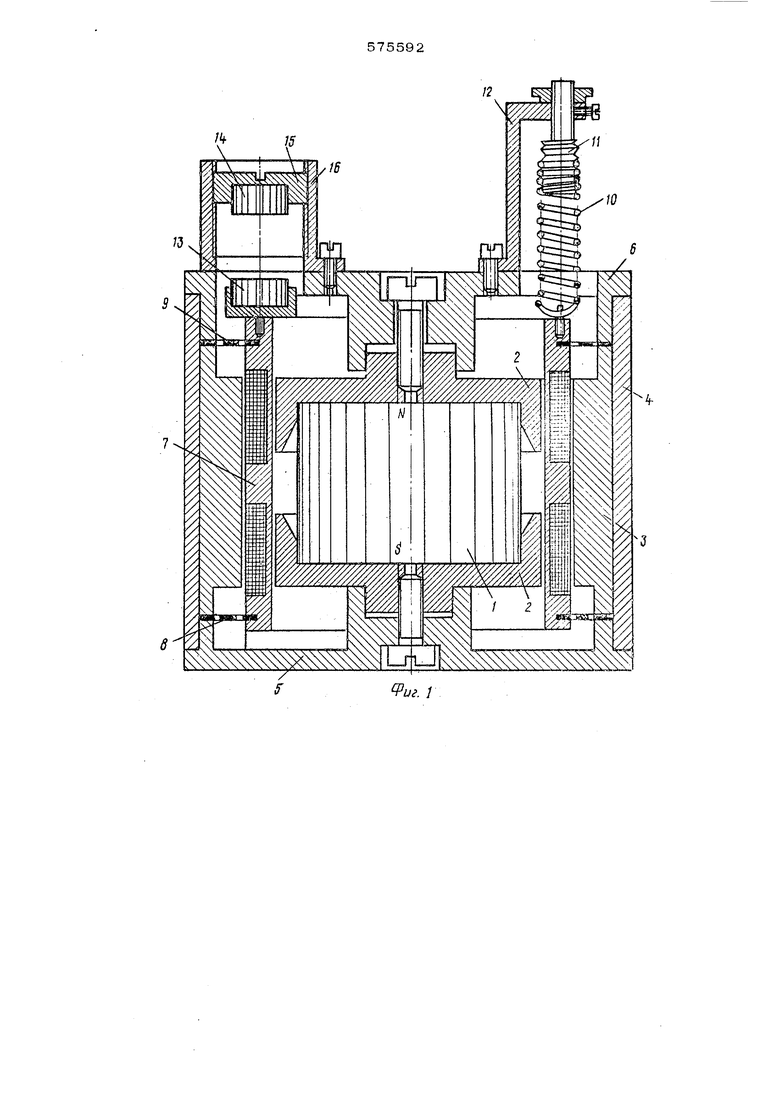
На фиг. 1 показан разрез предлагаемого сейсмоприемника; на фиг. 2 - нагрузочные характеристики упругого подвеса подвижной части сейсмоприемника
Магнитная схема сейсмоприемника состоит из постоянного магнита 1 с двумя напрессованными полюсными наконечни1сами 2 и кольцевого магнитопровода 3. Магнит с полюсными наконечниками центрируется в корпусе 4 с помощью нриливов дна 5 и крьпки 6 и образует с магнитопроводом кольцевой магнитный зазор, в котором на ирисовых пружинах 8 и 9 подвешена катушка 7 с двумя обмотками. Ирисовые пружины, закрепленные на конпах катущки, центрируют ее в зазоре и создают основную силу
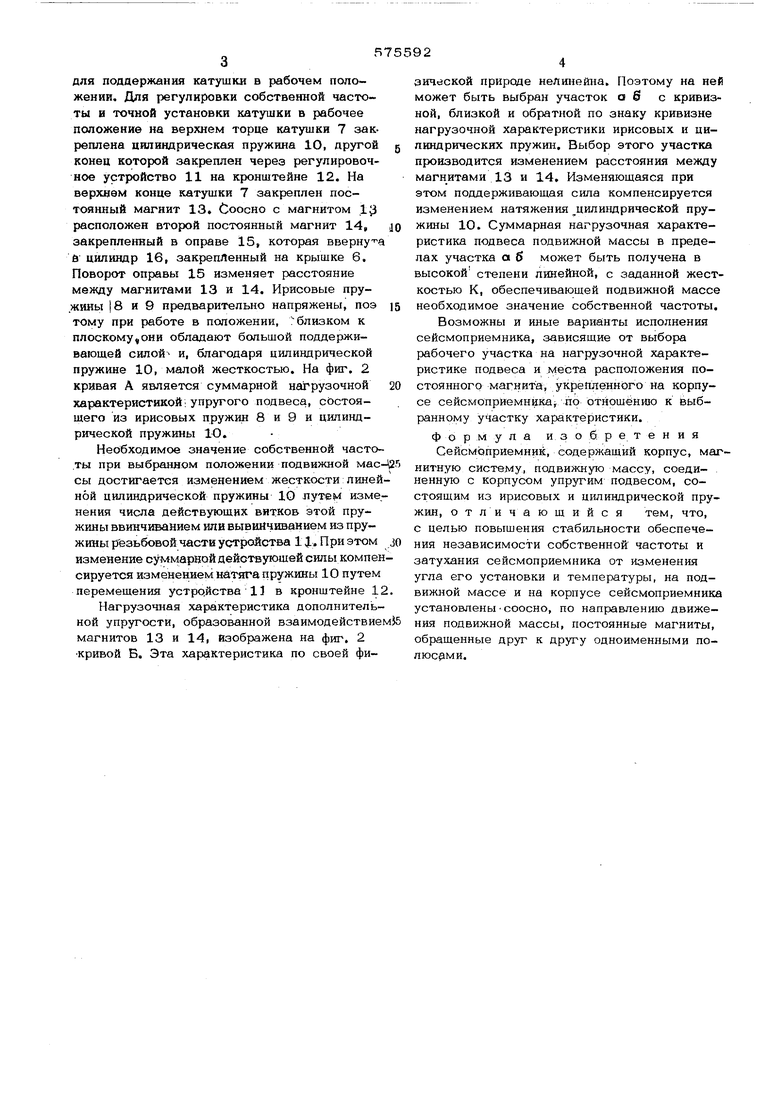
для поддержания катушки в рабочем положении. Для регулировки собственной частоты и точной установки катушки в рабочее положение на верхнем торце катушки 7 закреплена цилиндрическая пружина 10, другой конец которюй закреплен через регулировочное устройство 11 на кронштейне 12. На верхнем конце катушки 7 закреплен постоянный магнит 13. Соосно с магнитом 13 расположен второй постоянный магнит 14, закрепленный в оправе 15, которая ввернула и цилиндр 16, закрепленный на крышке 6. Поворот оправы 15 изменяет расстояние между магнитами 13 и 14. Ирисовые пружины |8 и 9 предварительно напряжены, поэ тому при работе в положении, : близком к плоскому, он и обладают большой поддер живающей силой- и, благодаря цилиндрической пружине 10, малой жесткостью. На фиг. 2 кривая А является суммарной ншгрузочной характеристикой:упругого подвеса, состоящего из ирисовых пружин 8 и 9 и цилиндрической пружины Ю.
Необходимое значение собственной часто.ты при выбранном положении подвижной массы достигается изменением жесткости линейной цилиндрической пружины 10 лутем изменения числа действующих витков этой пружины ввинчиванием или вывийч1шанием из пружины резьбовой части устройства 1J. П ри этом изменение сумм;арной действующей силы компенсируется изменением натяга пружины 10 путем перемещения устррйства 11 в кронштейне 12
Нагрузочная характеристика дополнительной упругости, образованной взаимодействием магнитов 13 и 14, изображена на фиг. 2 кривой Б. Эта характеристика по своей физической природе нелинейна. Поэтому на ней может быть выбран участок об с кривизной, близкой и обратной по знаку кривизне нагрузочной характеристики ирисовых и цилиндрических пружин. Выбор этого участка производится изменением расстояния между магнитами 13 и 14. Изменяющаяся при этом поддерживающая сила компенсируется изменением натяжения цилшщричесКой пружины 10. Суммарная нагрузочная характеристика подвеса подвижной массы в пределах участка а б может быть получена в высокой степени линейной, с заданной жесткостью К, обеспечивающей подвижной массе необходимое значение собственной частоты.
Возможны и иные варианты исполнения сейсмоприемника, зависящие от выбора рабочего участка на нагрузочной характеристике подвеса и места расположения постоянного магнитна, укрепленного на корпусе сейсмоприемника по отношению к выбранному участку характеристики.
Формула изобретения СейсмоприемниЕ, содержащий корпус, магнитную систему, подвижную массу, соединенную с корпусом упругим подвесом, состоящим из ирисовых и цилиндрической пружин, отличающийся тем, что, с целью повышения стабильности обеспечения независимости собственной частоты и затухания сейсмоприемника от изменения угла его установки и температуры, на подвижной массе и на корпусе сейсмоприемника установлены СООСНО, по направлению движения подвижной массы, постоянные магниты, обращенные друг к другу одноименными поЛЮС0МИ. Vuf. 1
(fut.Z
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический сейсмоприемник | 1979 |
|
SU918915A1 |
| Электродинамический сейсмоприемник | 1982 |
|
SU1056105A1 |
| Сейсмоприемник | 1982 |
|
SU1056104A1 |
| Сейсмоприемник | 1987 |
|
SU1509771A1 |
| Устройство для регулирования жесткостиупРугОй пОдВЕСКи иНЕРциОННОй МАССыСЕйСМОпРиЕМНиКА | 1978 |
|
SU842673A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 1994 |
|
RU2082991C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2001 |
|
RU2207522C2 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 1973 |
|
SU363059A1 |
| Электродинамический сейсмоприемник | 1979 |
|
SU855580A1 |
| СЕЙСМОМЕТР | 1999 |
|
RU2159449C1 |