Изобретение относится к сельскохозяйственной технике, а именно к машинам для выкапывания картофеля с просеивающими и транспортирующими механизмами.
Целью изобретения является повышение эффективности уборки картофеля ,
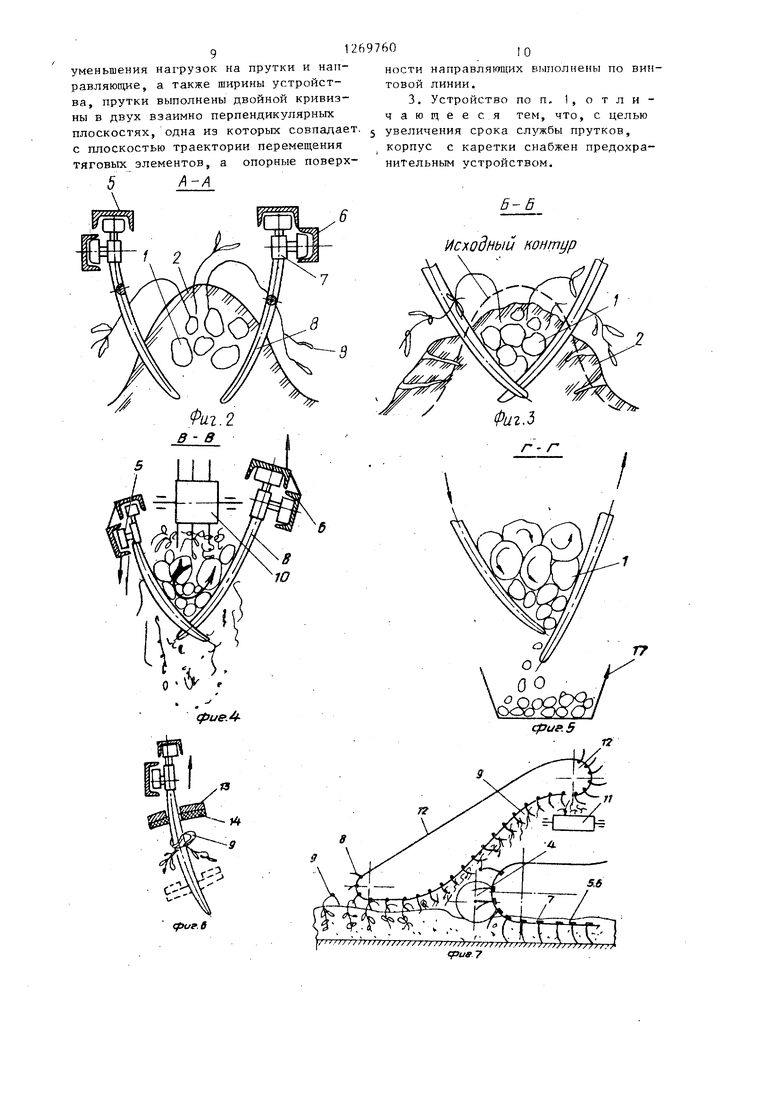
На фиг. 1 показана принципигшьная схема устройства (прутки на верхней ветви направляющих условно не показаны), на фиг. 2 - разрез А-А на фиг. 1, начало и конец рыхления землиц на ,фиг. 3 .- разрез Б-Б на фиг. 1J вскапьшание, на фиг. 4 разрез В-В на фиг. 1, очистка картофеля от примесейJ на фиг. 5 - разрез Г-Г на фиг. 1, разделение по крупности; на фиг. 6 - процесс самоочистки прутка от ботвы на фиг. 7удаление ботвы перед выкапыванием картофеляi на фиг. 8 - привод упоров; на фиг. 9 - сечение Д-Д на фиг. 8; на фиг. 10 - узел крепления . прутка.
Устройство для выкапывания клубней 1 картофеля из рядка 2 состоит из ходовой рс1мы 3 с направляющим колесом 4. На раме смонтирован транспортер для выкапывания, очистки и транспортировки картофеля, состоящий из направляющих 5 и 6, в которых на каретках 7 с возможностью перемещения с помощью гибкого тягового органа (не показан) установлены изогнутые прутки 8. Позицией 9 обозначена ботва. В качестве тягового органа приме Няют цепь, ленту или канат, соединяющие с определенным шагом каретки :7 меяэду собой в бесконечную петлю. Привод перемещения цепи с каретки Может быть вьшолнен от звездочки (не показано). При монтаже гибкого тягового органа в направляющих необходимо обеспечивать отставание каретки с прутком на направляющих 5 относительно каретки на направляющие: 6 на половину шага. На одной каретке закреплено по одному или по два прутка. Направляющие на раме закреплены с. возможностью регулирования расстояния между,ними (на ншкней ветви в двух плоскостях). Число пар направляющих может быть столько, сколько позволяет проектируемая мощность привода: для одного рядка (как показано на чертежах) или для двух и более. Кроме того, на раме установлены транспортеры для очистки и уда ления ботвы по двум вариантам вьтолнения. Первый (фиг. 1) включает очистной транспортер 10 с шарнирно закрепленными пальцами-зацепами из пружиной стали и отводящий транспортер 11. Второй вариант (фиг. 7) включает транспортере 11 и 12 и выполнен аналогично транспортеру для копания картофеля. Для очистки прутко от ботвы на раме установлены направляющие 13 с резиновыми обкладками скребками 14„ Наклонный участок направляющих 5 и 6 нижней ветви соединен в точках G , d ,, е шарнирно: внизу - с горизонтальным участком, вверху - с кривошипно-шатунным механизмом 15. Направляющие 5 и 6 в месте соединения подвижной и неподвижной горизонтапьной частей над контейнерами снабжены ловушками 16. Для приема сортированной продукции установлены контейнеры 17 и 18 для мелкого и крупного картофеля соответственно. Корпус каретки 7 включает предохранительный узел, состоящий из кoJ ycнoй разрезной втулки 19, охватывающей конусный х-востовик прутка 8, и пружинящего элемента 20 (втулки) из мягкой резины. Для возврата прутка в исходное положение над направляющими установлены упоры 21, выполненные неподвижными с плавным заходом или подвижными с шарнирным креплением и приводом перемещения от пневмоцилиндра 22.
Устройство работает следующим образом.
При перемещении ходовой рамы 3 вдоль рядка 2 картофельного поля от дополнительного тягового средства (трактора) или от собственной силовой установки (самоходный вариант) крутящий момент через передаточные механизмы (редуктор, звездочки и т.д.) передается на испольнительный рабочий орган, т.е. на гибкий тяговый элемент, соединенный с каретками 7. Тяговое усилие цепи заставляет каретки с прутками 8 перемещаться вдоль направляющих 5 и 6 по замкнутой траектории со скоростью V, равной поступательной скорости рамы 3. Синхронизацию этих скоростей можно осуществить прямой связью привода с ходовыми колесами. Направление дви,жения рамы обеспечивает направляющее колесо 4. В зависимости от пространственно го положения каретки с п)утком производится различная работа. На верх ней ветви (фиг. 1) направляющих 5 и 6 каретка и пруток самоочищаются от. остатков прилипшей ботвы 9 и зем ли за счёт вибрации при передвижении На учсастке копания (длина горизонтали а ) йрутки 8 поочередно внедряются в землю. При этом для обеспечения плавности захода прутков в горизонтальную и плоскую поверхность земли с криволинейного участка верхней ветви направляющих прутки в плоскости направления движения рамы (вдоль рядка 2) выполнены изогнутыми (фиг. 1). Кроме того, эти же прутки изогнуты в перпендикулярном направлении, что дает возможность по мере их погружения конец прутка заводить под рядок с клубнями 1 картофеля (фиг. 2). Таким образом, двойная кри визна позволяет заводить в землю прутки последовательно с направляющих 5, а затем 6, .обеспечивая охват рядка снизу с обеих сторон как решет кой. По мере продвижения рамы 3 вдоль рядка по полю прутки на участке а находятся в земле и в силу равенства скоростей V, движения рамы по земле и кареток по направляющим происходит обкатывание бесконечной .петли гибкого элемента с каретками по земле без проскальзьшания (по ана логии сравнимо с шарнирной лентой ходовой части трактора). При этом вновь входящие в землю прутки не только внедряются в основание рядка, но и постепенно сближаются, группируя картофель, обжимая рядок и вытес няя лишнюю землю через решетку, образованную прутками. Этому способствует сближение между собой траектории направляющих 5 и 6, искривление плоскости направляющих по винтовой поверхности (что заставляет прутки сближаться и подниматься, т.е. двигаться по радиусу с центром вращения на оси направляющих), а также вибрация кареток и прутков от перемещения их по направляющим или от отдельно установленного вибратора (эксцентрикового, электромагнитного и т.д.). Высокочастотные колебания незначи тельно воздействуют на стойкость обо рудования, но хорошо способствуют сн жению трения, разрушению почвы и отделению ее от клу{1ней. Кроме того, можно прядать горизонтальные колебания раме или направляющим, чтобы обеспечить покачивание в плоскости, перпендикулярной рядку, с заданной амплитудой относительно вертикали. Такие колебания возникают естественным образом при движении направляющего колеса 4 по неровностям почвы. Для упорядочения этих колебаний применяют кривошипно-шатунный механизм 15, причем в качестве привода применяют поступательное перемещение кареток одной из направляющих на этом участке (по типу цевочной передачи). Перечисленные выше механические воздействия повьш1ают эффективность отделения клубней от почвы еще в земле и меняют профиль рядка (фиг. 3, исходный контур показан пунктиром). Почва и комки разрушаются и выдавливаются из положения над клубнями в междурядья. В дальнейшем каретки переходят на наклонный участок направляющих, извлекая прутками, как в решетке клинообраз- ной формы, клубни с корневой системой, остатками земли и ботвы 9. При этом усилие сопротивления почвы при входе в нее прутков компенсируется усилием от выхода прутков с клубнями из почвы, т.е. усилия замыкаются на раме, и дополнительного утяжеления рамы не требуется. При движении кареток по наклонному участку нижней ветви направляющих происходит транспортировка картофеля к месту разгрузки и одновременно очистка картофеля от примесей (фиг. 4). Прутки на этом образуют желобчатый по профилю и решетчатый прутковой транспортер, в котором под действием вибрации (от перемещения по направлякндим и Колебаний направляющих 5 и 6 по вертикали относительно друг друга с помощью механизма 15) происходит отделение клубней от почвы, ботвы, корневой системы, измельчение комков почвы. Часть ботвы и корней зах- ватьшается зацепами очистного транспортера 10 и передается на отводяий транспортер 11, который сгружает х на обработанную часть поля. Остальная (основная) часть примесей росьтается вниз сквозь- решетку. Глубина (конусность) желоба, образоанного прутками (фиг. 4 и 5), фикируется изменением плоскостей направляющих. Необходимо, чтобы в момент выхода прутков с клубнями из валка, форма бьша клинообразной (фиг. 3), при подходе к месту контакта с транспортером 10 угол клина увеличивается, а глубина желоба уменьшается, обеспечивая более ровный слой массы и большую ширину захвата ботвы и корней, и, наконец, в конце этого участка b направляющие вновь должны обеспечить глубокий желоб (фиг. 5). Более глубокий желоб обеспечивает при вертикальных перемещениях направляющих 5 и 6 относительно друг друга от привода более тщательное перемешивание карто феля,, перекат юание (безударная обработка) их относительно друг друга не только по объему желоба, но и вокруг собственной оси, что способствует лучшему отделению от почвы и перемапьшанию комков, отделенипо от корней и ботвы, так как происходит не отрыв от клубня, а отламывание стеблей, что- гораздо эффективней. И, наконец, в процессе обработки про исходит под действием колебаний сор тировка картофеля по крупности на основании эффекта вибрационного разделения материалов и деталей по крупности. Например, свинцовый шар на дне емкости, засыпа 1ной свинцовой дробью или легкими шариками из плас массы (безразличен вес, важны объем ные размеры, амплитуда и частоты ко лебаний) , под действием вибрации выталкивается (всплывает) на поверхность более мелких деталей. Тож самое происходит в устройстве: механизм 15 качает за счет шарнирного соединения в точках с , d , b направляющие 5 и 6 во встречном irUiH по путном направлении. С помощью известных преобразовательных механизмов такие изменения направлений мож но ос /ществлять через один оборот привода или после проведения одного из видов колебаний: встречного или попутного. Таким образом получается встряхивание и перекатывание поочередно. Мелкие клубни оседают на дне а крупные накапливаются сверху (фиг. 5). После этого каретки с очи щенной и рассортированной продукцией вмкодят через ловушку 16 (для лу шего совпадения подвижкой и неподви ной частей направляющих) на горизон тальный участок разгрузки, 605 Здесь направляюш 1е 5 и 6 расходятся на величину, обеспечивающую проход мелкого картофеля в контейнер 17 в зазоры между прутками. При прохождении кареток над контейнером 18 прутки полностью расходятся и крупный картофель высыпается в короб. После этого каждьй пруток 8 заходит в щель между резиновыми обкладками скребками-14 на направляющих 13 и, двигаясь по закруглению на криволинейной траектории, начинаетпродвигаться вдоль направляющих 13 и одновременно выходит из них (фиг.1 и 6). При этом происходит соскабливание ботвы или почвы с поверхности прутка. После выхода прутков из направляющих 13 они передвигаются по верхней холостой ветви направляющих (наверху часть прутков условно не показана, см. фиг. 1). На фиг. 7 показан дополнительный транспортер 12, выполненный аналогично основному (фиг. 1). Назначение транспортера 12 тоже самое, что и транспортера 10. Разница лишь в том, что транспортер 12 убирает ботву с почвы до выкапьшания картофеля. Предварительное скашивание ботвы перед копанием, косилкой эффекти шо лишь при вертикальном положении стеблей ботвы 9, но обычно от дождей, ветров, от засыхания ботва (причем наиболее крупная и тяжелая) полегает на рядок, а чаще в междурядье (см. фиг. 2 и 7), и косилкой не скашивается. Поэтому очистка от примесей при уборке картофеля затруднительна, механизмы забивает ботвой и устройство останавливается. При этом практически напрасно работает косилка.Поэтому установка транспортера преследует две цели: убрать ботву полностью без предварительного скашивания и высвободить косилку и предварительно взрьпспить землю. Прутки на транспортере 12 изогнуты в одной плоскости в виде граблей и расположены между направляющих шарнирно на одной оси по 4-5 шт. Прутки ложс1тся на почву, копируя ее неровности по ширине .захвата и, не углубляясь под собственным весом в почву, сгребают ботву, отрывают ее от клубней и удаляют на транспортер 11. При этом от усилий отрьша происходит частичное рыхление почвы рядка, облегчающее дальнейшее выкапьшание. Процесс копания можно при удов летворительной проходимости произво дить перемещением ходовой рамы 3 от тягача или собственного привода. При этом прутки 8 на участке q , заглубившись в землю, создают тяговое усилие, заставляющее с той же скоростью, что и рама, перемещаться каретки в направляющих. При ухудшении состояния почвы и проходимости включают индивидуальный привод движения гибкого тягового элемента (цепи) с каретками по направляющим, В этом случае прутки в земле являются не только копающими органами, но и грунтозацепами, обеспечивающими дополнительное сцепления с почвой и создающими дополнительную тягу для перемещения всего устройства. В мест ностях с каменистой почвой возможны случаи, когда конец прутка упирается в камень (фиг. 8). При этом под действием вертикальной силы камень вдав ливается в почву (при небольших размерах и рыхлой почве), выдавливает в сторону или сам пруток в силу упругих свойств пружинящего материала, из которого он изготовлен, изгибается и соскальзывает с препятствия. Если этого не произойдет, то возможна поломка прутка или каретки и остановка всего устройства. Поэто,иу в корпусе каретки 7 имеется пре,дохранительный узел. При возрастании осевых усилий конусный хвостик перемещается вверх от препятствия и, раздвигая половины разрезной втулки 19, выходит из корпуса каретки на величину, зависящую от глубины залегания в земле препятствия. Для того, чтобы при дальнейшей работе не произошло разворота прутка в любую сторону от исходного поло жения, конусный хвостовик и сечение прутка выполнены овального или мно.гогранного профиля, обеспечивающего фиксацию в плоскости. При подходе вьшедшего из строя прутка (фиг, 1) к упорам 21 операто из кабины включает подачу воздуха в пневмоцилиндр 22 и упором вдавливает хвостовик обратно в гнездо. В исходном положении упругие силы резиновой втулки 19 вновь сближают полукольца втулки и, обжимая хвостовик, фиксируют, пруток в осевом и окружном направлениях. При применении устройства 760 на некаменистых почвах пруток крепят ,к каретке жестко. Возможен вариант выполнения предлагаемого устройства. Каретки можно соединить между собой шарнирами, т.е. обойтись без специального гибкого тягового элемента (цепи), и создать минимальный просвет между прутками. Направляющие сваривают из двух швеллеров взаимно перпендикулярно. Каретки снабжаютцентрирующим роликами, взятыми от роликовой цепи. Прутки изготавливают из проката пружинной проволоки, Бункера изготавливают с опускаю гр1мися под весом картофеля решетчатым дном, что снижает удары клубней ,с высоты и дает возможность в процессе погрузки удалять просыпь. Предположительная длина участка копания 1,52 м, а наклонного участка 3-4 м, высота - в пределах транспортных габаритов. Предохранительный узел может быть любым из известных устройств аналогичного назначения для осевой фиксации, например шариковый пружинный фиксатор, Положительный эффект заключается в применении для копки картофеля (на всех операциях) одного агрегата в сложных почвенно-климатических условиях и обеспечении сохранности картофеля, Формула изобретения 1, Устройство для выкапьшания картофеля, включающее ходовую раму, с закрепленными на ней рабочими органами, вьтолненными в виде тяговых элементов с закрепленными на них одним концом прутками, причем траектория нижней ветви рабочих органов посредством направляющих на участке копания выполнена горизонтальной, а на участке транспортировки и очистки наклонной, отличающееся тем, что, с целью повьш1ения . эффективности уборки картофеля, прутки закреплены на тяговых элементах посредством кареток, снабженных размещенными во взаимно перпендикулярных плоскостях роликами, взаимодействующими с опорными поверхностями направляющих, наклонные части которых установлены подвижно и снабжены вибратором, 2. Устройство поп, 1, отличающееся тем, что, с целью
9126976010
уменьшения нагрузок на прутки и нап-ности направляклцих выполнены по винравляющие, а также ширины устройст-товой линии.
на, прутки выполнены двойной кривиз- 3. Устройство по п, 1, о т л и ны в двух взаимно перпендикулярныхч ающе е с я тем, что, с целью
плоскостях, одна из которых совпадает. увеличения срока службы прутков,
с плоскостью траектории перемещениякорпус с каретки снабжен предохратяговых элементов, а опорные поверх-нительным устройством. V фие. Исходный контур Фаг.Ь


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЫКАПЫВАНИЯ КАРТОФЕЛЯ | 1994 |
|
RU2065679C1 |
| Корнеклубнеплодоуборочная машина | 1983 |
|
SU1126230A1 |
| Машина для уборки корнеклубнеплодов | 1984 |
|
SU1165264A1 |
| Устройство Мельникова В.В. для выкапывания картофеля | 1988 |
|
SU1535430A1 |
| МАЛОГАБАРИТНЫЙ КАРТОФЕЛЕУБОРОЧНЫЙ КОМБАЙН | 2011 |
|
RU2460269C1 |
| КОРНЕКЛУБНЕУБОРОЧНЫЙ КОМБАЙН | 1997 |
|
RU2128418C1 |
| Клубнекорнеплодоуборочная машина | 1985 |
|
SU1279557A1 |
| КОМБИНИРОВАННАЯ МАШИНА ДЛЯ УБОРКИ КАПУСТЫ И КАРТОФЕЛЯ | 1933 |
|
SU38371A1 |
| КОМБАЙН ДЛЯ УБОРКИ КОРНЕПЛОДОВ С РЕЦИРКУЛЯЦИОННЫМ МЕХАНИЗМОМ | 2007 |
|
RU2450502C2 |
| КОРНЕКЛУБНЕУБОРОЧНАЯ МАШИНА СМЫСЛОВА | 1996 |
|
RU2188533C2 |


21
v//////y/y/f
| Машина для уборки картофеля | 1981 |
|
SU990113A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
