Изобретение относится к сельскому хозяйству, в частности к средствам машинного доения коров.
Цель изобретения - повышение удобства эксплуатации.
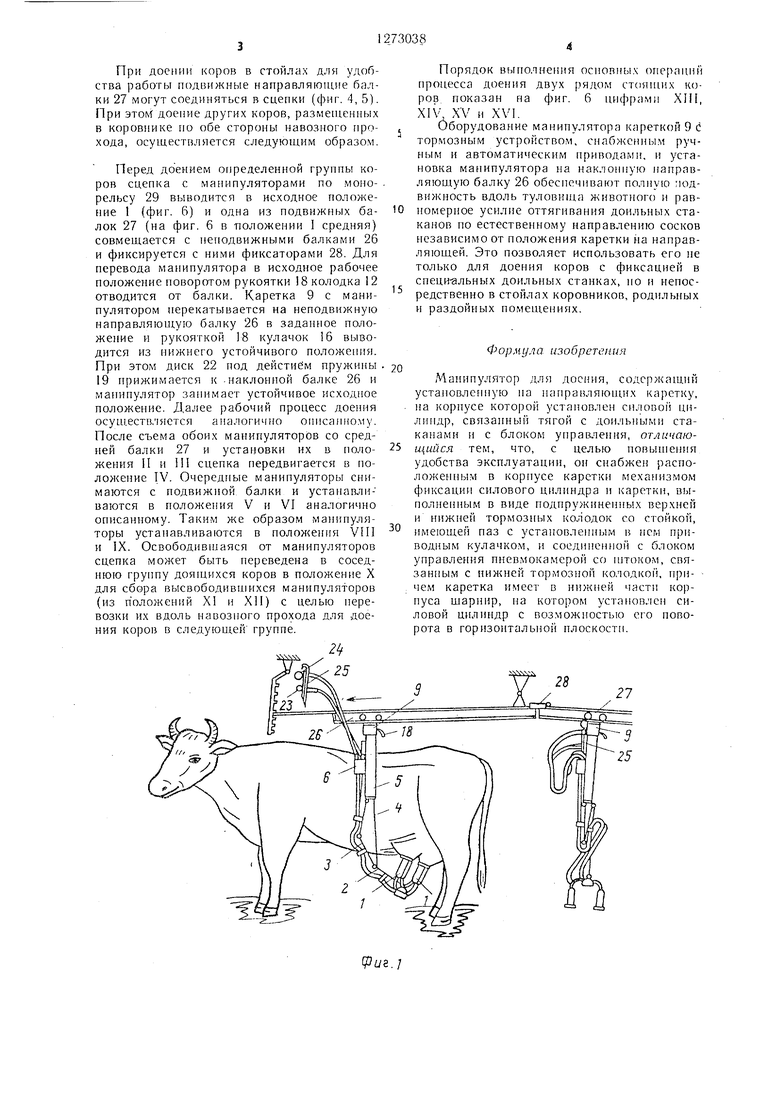
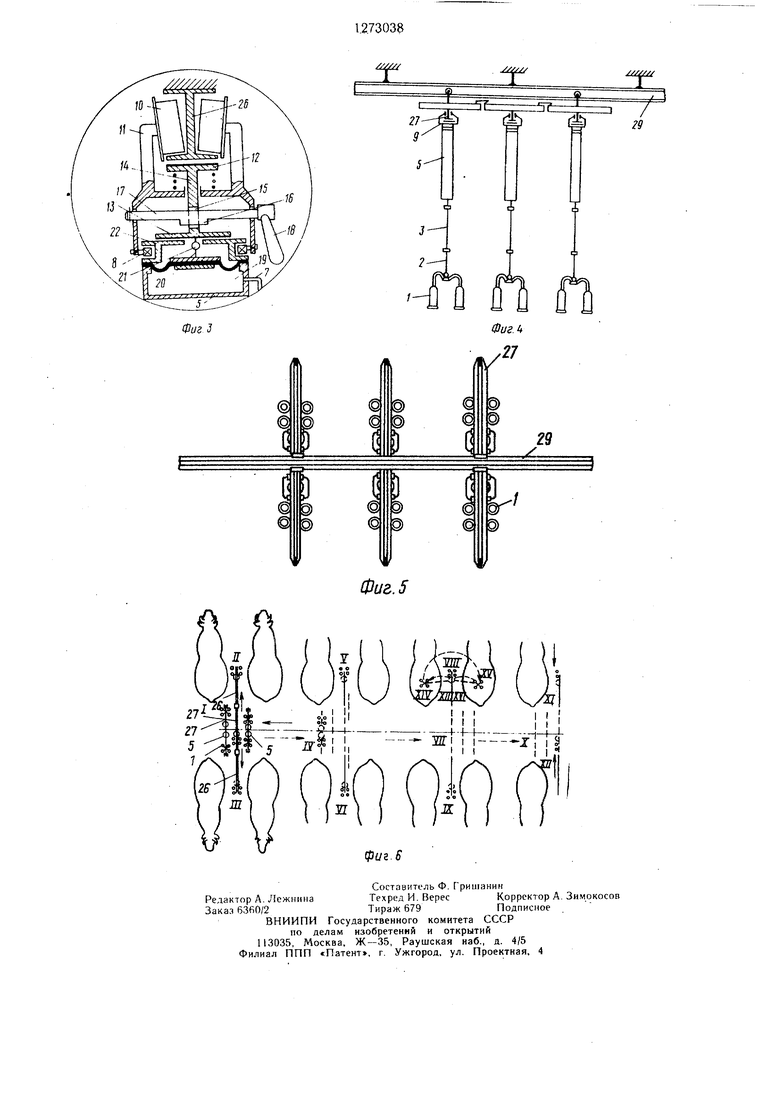
Иа фиг. 1 изображены манипуляторы на направляющих балках при доении и транспортировке, общий вид; на фиг. 2 - конструкция манипулятора; на фиг. 3 - конструкция каретки; на фиг. 4 - группа манинуляторов на направляющих балках в транспортном положении, вид сбоку; на фиг. 5 - то же, вид сверху; на фиг. 6 - схема работы группы манипуляторов при доении коров в стойлах.
Манипулятор включает доильные стаканы 1, шарпирно соединенные между собой звенья 2 и 3, образующие тягу, гибкий элемент 4, силовой цилиндр 5, блок 6 управления и пневматические трубки 7. Силовой цилиндр 5 манипуляторов горизонтальным щарниром 8 соединен с кареткой 9. Каретка 9 имеет ролики 10 и корпус II, содержащий механизм фиксации силового цилиндра и каретки, состоящий из верхней и нижней тормозных колодок 12 и 13, стойки 14, имеющей паз 15 с кулачком 16, вала 17 с рукояткой 18.
В верхней части цилиндра 5 размещена нневмокамера 19, содержащая силовой элемент со штоком 20, соединенным через щарнир 21 с нижней тормозной колодкой 13, взаимодействующей с диском 22. К вакуум-гфоводу 23 и молокопроводу 24 манипулятор подключается соединителем 25. Манипуляторы в стойлах подвещены на несущих неподвижных направляюпа,их 26 и подвижных направляющих 27, соединенных между собой фиксатором 28. Подвижные направляющие балки 27 подвегиены на монорельсе 29.
Манипу;1ятор работает следующим образом.
Дояр-онератор вручную переводит манипулятор с подвижной направляющей балки 2,7 па неподвижную 26 и устанавливает его в исходное положение. Поворотом рукоятки 18 ОН переводит кулачок 16 из нижнего устойчивого положения в свободное. При этом колодка 12 под действием пружины прижимается к направляюпхей балке 26 и обеспечивает фиксированное положение на ней манипулятора. Одновременно колодка 13 отходит ся диска 22 и обеспечивает расфиксированное состояние силового цилиндра 5, что позволяет ему свободно поворачиваться в шарнире 8 вместе с тягой (звенья 2 и 3) и доильными стаканами 1. Затем дояр-оператор с помощью соединителя 25 подключает мапипулятор к вакуум-проводу 23 и молокопроводу 24 и включает блок 6 управления, который посредством трубок 7 соединяет пневмокамеру 19 с вакуумом, а силовой цилиндр 5 с атмосферой. Таким образом, силовой цилиндр 5 вместе с тягой
{звенья 2 и 3) и доильными стаканами 1 может свободно перемещаться, что позволяет дояру-оператору устанавливать доильные стаканы на соск. Одновременно под
действием вакуума силовой элемент 20 перемещает тормозные колодки вниз. Колодка 13 прижимается к диску 22 и фиксирует шарнир 8 силового цилиндра , 5 с заданным направлением тяги {звенья 2 и 3) с доильными стаканами 1, а колодка 2 отходит
от балки 26 и обеспечивает расфиксированное состояние манипулятора. Это позволяет последнему свободно перемещаться по направляющей балке 26 (направление показано на фиг. 1 стрелкой) и оттягивать
доильные стаканы по естественному направлению сосков. Е еличина усилия оттягивания может устанавливаться изменением угла наклона направляющей балки 26.
По окончании выдаивания блок управ0 ления отключайт подвесную часть от вакуума и одновременно соединяет ппевмокамеру 19 с атмосферой, а силовой цилиндр 5 -- с вакуумом. Поршень цилиндра, втягиваясь, через гибкий элемент 4 складывает звенья 2 и 3 и поднимает доильные стаканы вверх. Одновременно под действием атмосферного давления воздуха в пневмокамере 19 и пружины колодка 13 отходит от диска 22 и освобождает шарнир 8, а колодка 12 при кимается к балке 26 и фикси-1 рует каретку 9 в заданном положении. Благодаря наклонному по.пожению силового цилиндра 5 при съеме доильных стаканов 1 за счет гравитационных сил и плеча {звено 2} возникает вращающийся момент, под действием которого в расфик2 сированном шарнире 8 поворачивается силовой цилиндр 5 вместе с тягой (звенья 2 и 3; и выводит доильмые стаканы из-под вымени, коровы.
Аналогично осуществляется доение коровы, стоящей рядом с этим же маиину0 лятором.
Доение коров, стоягцих напротив через навозный проход коровника, этим манипулятором осуществляется следующим образом. После выдаивания последней коровы первой пары дояр-оператор снимает соедики5 тель 25 с молокопровода 24 и вакуу.мпровода 23, поворотом рукоятки 18 отжимает колодку 12 от направляющей балки 26 и одновременно, фиксируя luapnnp В, переводит каретку 9 .по балке 26- на состыкованную с ней фиксатором 28 балку 27, С балки 27 каретка с манипулятором может быть переведена на сопряженную с ней неподвижную направляющую балку, прол.оженную .между парой противостоящих коров по другую сторону навозного прохода.
5 После перевода манипуляторов в новое ис.ходное положение и 1 ключепия манипулятора в работу процесс доения смеж1 ых коров осуществляется аналогично описанному При доении коров в стойлах для улоб ства работы подвижные направляющие бал ки 27 могут соединяться в сцепки (фиг. 4, 5) При доение других коров, размещенных в коровнике по обе стороны навозного про хода, осуществляется следующим образом Перед доением ог1ределенной группы коров сцепка с манипуляторами по монорельсу 29 выводится в исходное положение 1 (фиг. 6) и одна из подвижных балок 27 (на фиг. 6 в положении I средняя) совмещается с неподвижными балками 26 и фиксируется с ними фиксаторами 28. Для перевода манипулятора в исходное рабочее положение поворотом рукоятки 8 колодка 12 отводится от балки. Каретка 9 с манипулятором перекатывается на неподвижную направляюнхую балку 26 в заданное положение и рукояткой 18 кулачок 16 выводится из нижнего устойчивого положения. При этом диск 22 под дейстийм пружины 19 прижимается к -наклонной балке 26 и ма1Н1пулятор занимает устойчивое исходное положение. Х1,алее рабочий процесс дое1н я осуществляется аналогично описанному. Помеле съема обоих манипулятор(эв со средней балки 27 и установки их в положения II и 111 сцепка передвигается в положение IV. Очередпые манипуляторы снимаются с подвижной балки и устанавливаются в положения V и VI аналогично описанному. Таким же образом манипуляторы устанавливаются в положения VIII и IX. Освободивн аяся от мапипуляторов сцепка может быть переведена в соседнюю группу доящихся коров в положение X для сбора высвободившихся манипуляторов (из пЪложений XI и XII) с целью перевозки их вдоль навозного прохода для доении коров в следующей группе. Порядок выпoлнetlllя основных операнин процесса доения двух рядом CTOHHIHX коров, показан на фиг. 6 цифрами Xlli XIV, XV и XVI. Оборудование манипулятора кареткой 9 с тормозным устройством, снабженным ручным и автоматическим нриводамн и установка манипулятора на накло1П1ую направляющую балку 26 обеспечивают полную подвижность вдоль туловища животного и равномерное усилие оттягивания доильных стаканов но естественному направлению сосков независимо от положения каретки на направляющей. Это позволяет использовать его не только для доения коров с фиксацией в снеци-альных доильных станках, но и непосредственно в стойлах коровников, родильных и раздойных помещениях. Формула изобретения Манипулятор для доения, содержащий установленную на направляюпшх каретку на корнусе которой установлен силовой цилнпдр, связанный тягой с доильными стаканами и с блоком унравлення, отличающийся тем, что, с целью повыще1Н1я удобства эксплуатации, он снабжен расположенным в корнусе каретки механизмом фиксации силового цилиндра и каретки, выполненным в виде поднружиненных верхней и нижней тормозных колодок со стойкой имеющей паз с установле}щым в нем приводным кулачком, и соединенной с блоком правления пневмокамерой со щтоком, свяанным с нижней тормозной колодкой, нрием каретка имеет в нижней части коруса щарнир, на котором установлен сиовой цилиндр с возможностью его повоота в горизонтальной плоскости.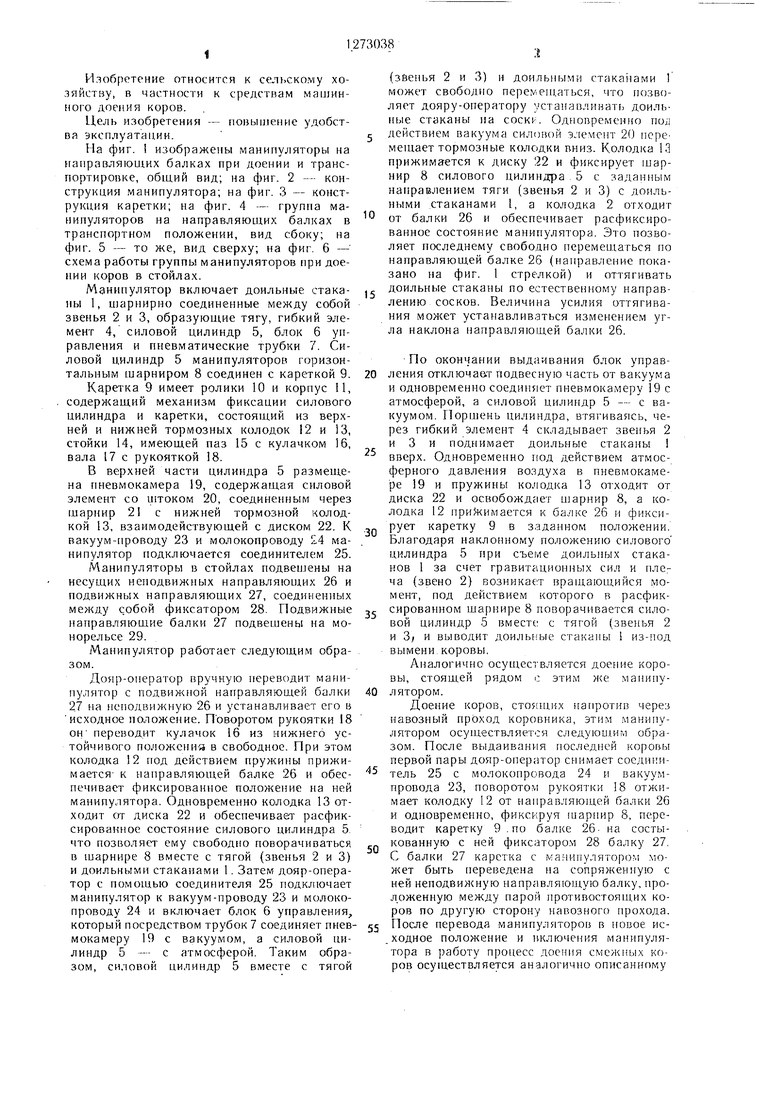
| название | год | авторы | номер документа |
|---|---|---|---|
| ДОИЛЬНАЯ УСТАНОВКА | 1994 |
|
RU2071247C1 |
| УСТАНОВКА ДОИЛЬНАЯ ВЫДВИЖНАЯ | 2002 |
|
RU2234835C1 |
| ПЕРЕДВИЖНОЙ ДОИЛЬНЫЙ АГРЕГАТ | 2001 |
|
RU2226822C2 |
| ПЕРЕДВИЖНОЙ ДОИЛЬНЫЙ МОДУЛЬ | 2010 |
|
RU2423822C1 |
| Коровник | 1988 |
|
SU1658936A1 |
| ПЕРЕДВИЖНОЙ ДОИЛЬНЫЙ АГРЕГАТ | 2011 |
|
RU2466533C1 |
| ПЕРЕДВИЖНОЙ ДОИЛЬНЫЙ АГРЕГАТ | 2013 |
|
RU2538384C1 |
| Доильная установка | 1978 |
|
SU698591A1 |
| Доильная установка | 1987 |
|
SU1443861A1 |
| ДОИЛЬНЫЙ АППАРАТ | 1999 |
|
RU2169460C1 |
Изобретение относится к области сельского хозяйства, в частности к средствам машинного доения коров. Цель изобретения - повышение удобства эксплуатации манипулятора. Манипулятор содержит доильные стаканы 1, звенья 2 и 3, гибкий элемент 4, силовой цилиндр 5, блок управления 6, пневматические трубки 7. Цилиндр 5 горизонтальным шарниром 8 соединен с кареткой 9, имеюшей ролики 10. В корпусе каретки установлен механизм фиксации каретки и силового цилиндра. Он выполнен в виде верхней и нижней тормозных колодок 12 и 13 со стойкой. В пазу стойки установлен приводной кулачок 16. Шток 20 пневмокамеры 19 связан с нижней колодкой 13. При фиксации манипулятора поворотом кулачка 16 колодка 12 прижимается к направляющей балке 26. Колодка 13 отходит от диска 22 и расфиксирует силовой цилиндр 5, обеспечивая ему возможность поворота на. шарнире 8. 6 ил. (Л ГчЭ 00 о 00 оо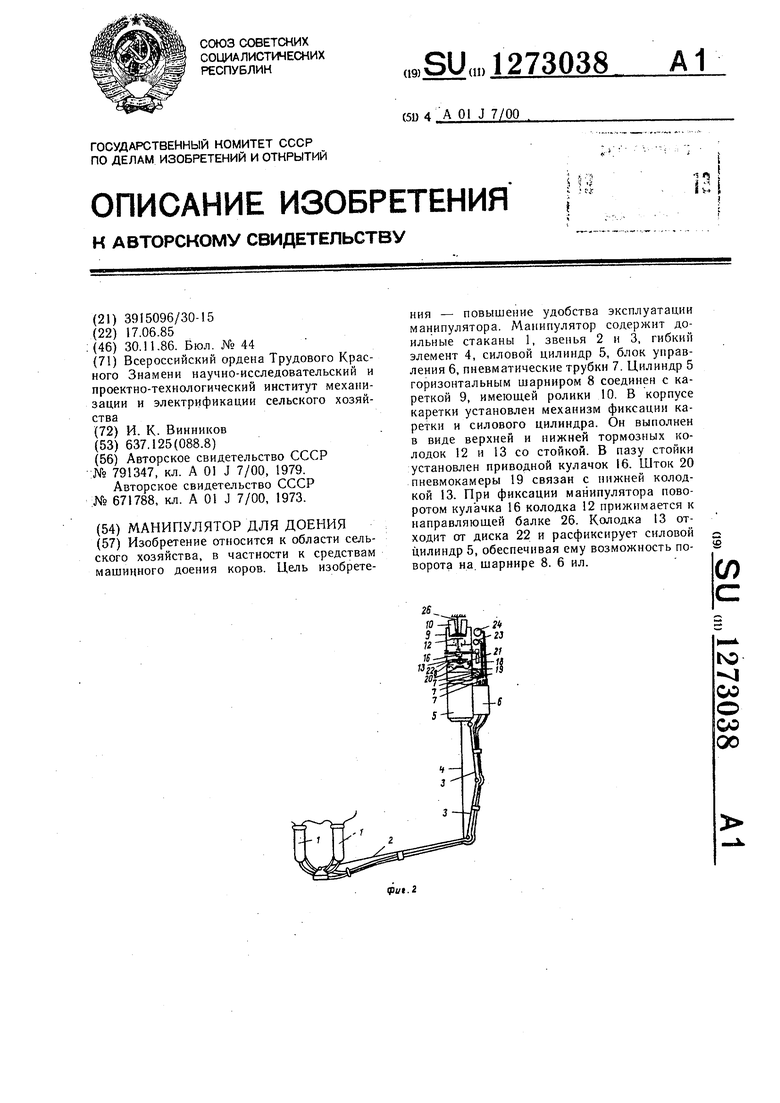
| Манипулятор к доильным станкам | 1979 |
|
SU791347A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для оттягивания,снятия и отведения в доильных станках изпод коровы доильного аппарата | 1973 |
|
SU671788A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
