тор 5. Блок настройки делителей так изменяет напряжение на управляемых входах делителей 3, 4, чтобы напряжение на выходе сумматора 5 было минимально. Введение перемножителей 8-13, интеграторов 6, 7, 14, 16 и 18,
сумматоров 15 и 17, квадраторов 19 и 21 обеспечивает устройству способность вычислять мнимую и действительную части комплексного модуля коэффициента передачи с любой наперед заданной погрешностью. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров линии электропередачи в режиме короткого замыкания | 1984 |
|
SU1257565A1 |
| Устройство для виброиспытаний | 1986 |
|
SU1366897A1 |
| Способ измерения разности фаз | 1984 |
|
SU1273833A1 |
| Квазикогерентный демодулятор сигналов манипуляции с минимальным сдвигом | 1987 |
|
SU1561214A1 |
| Устройство для измерения диэлектрических параметров | 1985 |
|
SU1277019A1 |
| Устройство для допускового контроля амплитудно-частотной характеристики четырехполюсников | 1989 |
|
SU1608591A1 |
| Способ измерения амплитуды сигнала | 1986 |
|
SU1465786A1 |
| Амплитудно-фазовый анализатор гармоник | 1985 |
|
SU1272272A2 |
| Измеритель разности глубин модуляции | 1979 |
|
SU845117A1 |
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР | 2012 |
|
RU2506692C1 |
Изобретение может быть использовано в устройствах для определения вещественной и мнимой частотных характеристик систем автоматического регулирования. Цель изобретения - повьшение точности измерения и расширение частотного диапазона. Гармонические сигналы sintJt и costJt с выхода генератора 1 подаются на блок настройки делителей напряжения 6-20 и на входы управляемых делителей напряжения 3, 4. Сигнал sinu)t подается на объект 2. С выхода объекта 2 и с выт ходов управляемых делителей напряжения 3,4 сигнал поступает на суммасг ю со 00 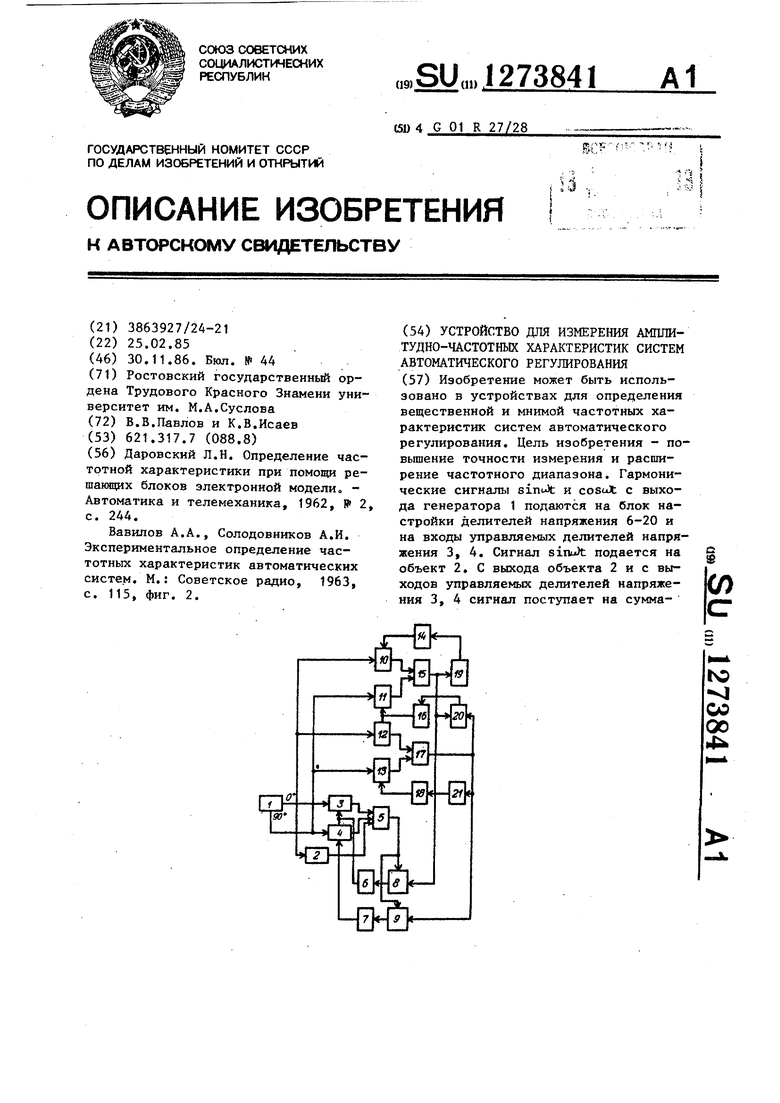
Изобретение относится к электроизмерениям и может быть использовано для определения вещественной и мнимой частотных характеристик систем автоматического регулирования.
Цель изобретения - повышение точности измерения и расширение частотного диапазона.
На чертеже приведена функциональная схема устройства.
Устройство содержит генератор 1 гармонических колебаний с выходами, сдвинутыми по фазе на 90°, исследуемый объект 2, первый и второй управляемые делители 3 и 4 напряжений, первьй сумматор 5, первый и второй интеграторы 6 и 7, первый В, второй 9, третий 10, четвертый 11, пятый 12 и шестой 13 перемножители, третий интегратор 14, второй сумматор 15, четвертый интегратор 16, третий сумматор 17, пятый интегратор 18, первый квадратор 19, седьмой перемножитель 20, второй квадратор 21,
Выход с нулевой фазой генератора 1 гармонических колебаний соединен с входом исследуемого объекта 2, сигнальным входом первого управляемого делителя 3 напряжений и первыми входами третьег(4 и пятого перемножителей 10 и 12.
Выход с фазой, сдвинутой на 90 , генератора 1 гармонических колеба- НИИ соединен с сигнальным входом . второго управляемого делителя 4 напряжений и с первыми входами четвертого и шестого перемйожителей 11 и 13. Выходы управляемых делителей 3 и 4 напряжения и исследуемого объекта соединены соответственно с тремя входами первого сумматора 5, выход которого соединен с первыми входами первого и второго перемножителей 8 и 9, выходы которых соединены соответственно с входами первого и второго интеграторов 6 и 7, выхода которых соединены с управляющими входами соответственно первого и второго управляемых делителей 3 и 4 напряжения. Выходы третьего и четвертого перемножителей 10 и 11 соединены соответственно с первым и вторым входами второго сумматора 15, выход которого соединен с вторым входом первого перемножителя 8, с первым входом седьмого пе лмножителя 20 и с входом первого квадратора 19, выход которого соединен с входом третьего интегратора 14, выход которого соединен с вторьм входом третьего перемножите- . ля 10. Выходы пятого и шестого перемножителей 12 и 13 соединены соответственно с первым и вторым входами
0 третьего сумматора 17, выход которо. го соединен с вторьн входом второго перемножителя 9, входом второго квадратора 21 и вторым входом седьмого перемножителя 20, выход которого соеSдинен с входом четвертого интегратора 16, выход которого соединен с вторыми входами четвертого и пятого перемножителей 11 и 12. Выход второго квадратора 21 соединен с входом пя0 того интегратора 18, выход которого соединен с вторым входом шестого пе|ремножителя 13, Выходами устройства являются выходы первого и второго интеграторов 6 и 7.
J Устройство работает следующим образом.
Гармоническое напряжение с выхода с нулевой фазой генератора 1 подается на вход управляемого делид теля 3 напряжения, на входы перемножителей 10 и 12 и на вход исследуемого объекта 2. Напряжение costOt с выхода с фазой, сдвинутой на 90° , генератора 1 подается на вход управляемого делителя напряжения А и на входы перемножителей 11 и 13. На выходах управляемых делителей 3 и напряжения (Нормируются напряжения С sinuM: и Cj cosoJt, где С, и С - у равляющие напряжения, полученные н выходах интеграторов 6 и 7. На вых де объекта 2 присутствует напряжен которое в комплексной форме имеет вид Ku)t y(t) |z(ijj)|e где 4 arg z(iu)); |z(iu))| (ioJ) +Im4z(iw3) ; Ф .- MElMl ReCz(iu)) Мнимая часть вьфажения (1) имеет 20 Imfy(t) I z(iu))| sinCtdt + Ч) . Ui |z(iu))| sinu)tcos4-blz(iu))| cosult sinH.25 Складываясь с выходными напряжения ми управляемых делителей Зи 4, на выход сумматора 5 формируется напряжение . |z(iuJ)| sina)tcos4+|z(iu))| cosuitsinHH +Ц sinu)t+q cosJt Asinu)t+Bcosu)t, (4 где A |z(iu))l созФ+ С, ; В- lz(iu))| sinH C. Это напряжение подается на первые входы перемножителей 8 и 9, на вторые входы которых подаются соответст венно напряжения К| n,,sinu)t + D, cosu)t Kj , sinuJt. + D, coscJt, снимаемыес выходов сумматоров 15 и 17 (здесь D, , D,5 , D,, и D, некоторые коэффициенты, называкяциеся элементами дисперсионной матрицы параметра С). Произведения б К. и К со f 2 ,держат постоянные составляющие ЕК-«(AsititOt+BcosoJt) (D sincJt+D cosuJt 11tu. AD sin Ot+BD cos2ojt+(BD., +AD.,)x t sinu)tcosuJt; Kj(Asinu)t+Bcosu)t)(D,sinuJ t+D cosuSt) )t+BDj,jCOs2oJt+(BD,,,j) f sinuJtcoscJt. Постоянные составляющие содержат )t+BD,,j и члены AD AD, + BD . Перемножители 8 и 9 выполняют функцию синхронных детекторов, для которых управляющим напряжением служит выходное напряжение сумкаторов 15 и 17, а входным напряжением - напряжение . Постоянные составляющие с выходов перемножителей 8 и 9, воздействуя на входы интеграторов 6 и 7, вызывают убывание напряжения С и С на их выходах (учитывая инверсию напряжения интегратором) . Это приводит к уменьшению вьгходного напряжения Е сумматора 5, что в свою очередь ведет к уменьшению постоянных составляющих на выходах перемножителей 8 и 9, а это способствует еще большему уменьшению С, и С и т.д. до тех пор, пока нап, - -2 ряжение на выходе сумматора 5 не станет равным нулю и соответственно не станут равны нулю выходные -напряжения перемножителей В и 9, а напряЯ -ппл. 1|,/ 1-ии /улг1. ji ri о. lie. и С„ не примут значения C -|z(iu))( С5 )) з1пф. To, что Су и C, принимают данные значения, видно, если приравнять выражение (4) нулю AsinoH; + Bco&Jt 0. Выражение, стоящее в левой части равенства, равно нулю при любом текущем значении времени t только в том случае, если , а так как А -lz(iuJ)( созФ + С О и В |z(iu)){ 81пФ + C,j 0, то отсюда следуют соотношения (5). Обнуление левой части равенства (6) при условии А О и В О происходит при любом значении t и, следовательно, при любом sintOt и cosJt. Дело в том, что при некоторых фиксированных значениях времени t,- i 1, 2, ...,п левая часть выражения (6) а следовательно, и равны нулю, даже если AW и , но поскольку в контуре настройки присутствует интегратор, контур не может мгновенно отреагировать на скачкообразное обнуление в моменты времени t- , следовательно, настройка контура, ведется только при условии сходимости -(z(iuJ)( cosip Cj (iu))| sini. IIo достижении этих значений процесс настройки заканчивается и устройство поддерживает значения напряжений С и Cj до тех пор, пока не изменится либо амплитуда или частота входного напряжения, либо не изменятся посто янные времени объекта 2. При этом система перестроится на новые значения С и С и снова придет в состояние равновесия. Обеспечить процесс сходимости настройки не трудно,так как если он отсутст вует, достаточно поменять фазу напряже ния водном или обоих контурах,образованных делителем напряжения 3, сумма тором 5, перемножителем 8, интегратором 6 (один контур), а также делителем А напряжения, сумматором 5, пе ремножителем 9, интегратором 7 (вто.рой контур). Полученные таким образом значения параметров С , и С равны действитель ной и мнимой частям комплексного модуля коэффициента передачи. Действительно, если подстави ь в вьфажения (5) вместо Iz(iiJ)l его выражение (2), то -/R2elz(iJ) -H2ralz(iu))| со8ф; (7 G -yRZelzCMI +Pm|z(iu3)l sinH. (В При возведении в квадраты вьфажений (7) и (8) и их суммировании получаем C2+q (R2e|z(iiAJ)| +Pmlz(iu3)| ) ( + R2e|z(iu))| + PmlzCiu)) . После деления выражения (8) на выражение (7) имеем sin L, sins cosUJ (3) это выражение с учетом выражения принимает вид . С, ReTztiu r Таким образом, получена система двух уравнений с двумя неизвестными R2e|z(iuJ)l+ Pm|z(iu))( ; С, Im(z(iu))f Ci кёТгТыУГ осле подстановки в первое уравнение вместо C,j его выражения из второго равнения Im|z(icO)| 2 RelzTIijTr чЧШйТГ -- Реиение этого уравнения относительно С имеет вид С2 R2e|z(iuO)| С, Re|z(iuJ)| , а С Iin|z(iuJ)| Таким образом, выходные напряжения С и C,j интеграторов 6 и 7 при обнулении выходного напряжения сумматора 5 в точности равны мнимой и действительной .частям комплексного модуля коэффициента передачи. Устройство предназначено для работы в области низких и инфранизких частот, поэтому при необходимости снять зависимость комплексного модуля z|ioj| от частоты. измерения необходимо вести по ряду фиксированных частот «J , uJ , .., uJ, находя каждый раз С и С и вычисляя z|(itx)) по формуле 1 z(iu))| Си и фаз,овый сдвиг Ч arctg было показано, на вторые входы перемножителей 8 и 9 подаются напряжения D| sinut П cosolt , и D, sinuJt 2,jCosoJt. Коэффициенты выбраны так, чтобы значения параметров С и С, были близкими к истиноптимальными. ным значениям С и С. В этом плане устройство можно рассматривать, как двухпараметрическуто самонастраивающуюся модель, которая изменяет в процессе настройки свои параметры так, чтобы минимизировать дисперсию оценок этих параметров. Модель объекта в общем случае имеет вид x(t) z(t)C(t), где xtn - мерньй вектор выхода модели (в данном случае скаляр); 71 C(t) г - вектор оценок параметров модели (в данном случае двухмерный вектор С.С,); z(t) - в общем случае матрица (zxn) физически реализуемых базисных операторов (в данном случае это вектор sinujt, cosuJt) . Если x(t) выходное напряжение объекта,то вектор рассогласования имеет вид , C(t) xa-z4t)C(t), где Т- момент времени t. Можно показать, что минимизация по С
0(М -(1 )()(sinaJt COSu)t Q )
UUJ D D cosjtD i
51 la
r,(,) (D,, sim)t + D,, cosu)t X, si D,,cosu)t Выполнив операцию векторно-матрично- го Второе уравнение данной системы решается в контурах: управляемый делитель 3 напряжения, сумматор 5, пере- множитель 8, интегратор 6 (находится С), далее управляемый делитель 4 напряжения, сумматор 5, перемножител 9, интегратор 7 (находится С.). Как бьшо показано, для настройки этих контуров используются напряжения Kj sin)t + D,, cosuJt и Kj Dj, sirm3t+ , cosu)t, которые получены в резульг тате решения первого уравнения системы (9). Решение уравнения D,, (t) (D, sintJu + D cosuit) осуществляется в первом контуре, образованном перемножителем 10, сумматором 15, квадратором 19 и интегратором 14. На входе этого контура (первый вход перемножителя 10) подается напряжение sinu)t с выхода генератора 1. На другой вход этого контура (второй вход сумматора 15) подается напряжение D, cosiJt с выхода перемножителя 11. Решение уравнения D (й)-1Вл1 sina)t+
D., D. ..D,, siniOt+D,cosiOt)4D,, sinu)t+D,, cosa)t)(D,2 sinuA+cosufc) S sin«)t+D cosu)t)(D sinu)t+D cos t) (D sinuJt+D .costot) .D,, sinJt + D,,j cosu)t. В„. sinmjt + В„„ cosuJf Dj, sinmjt + D 41 квадратичной форме 1(С) | (t C(t))« « КбСТ CCt ))d7 приводит к системе дифференциальных уравнений, реализующих алгоритм вычисления параметров С (напряжения С и C,j) по методу наименьших квадратов. В общем виде система имеет вид lD(t) -D(t)z(t)RzMt)D(t) lc(t) D(t)z(t)RE(t) где R - обратная матрица взаимной интенси ности шумов. Для двухмерной модели, учитывая, что z, sinuit, . z cosoJt, a также, что D, D , система уравнения имеет вид умножения, получаем систему +D cosult) осуществляется во втором контуре, образованном перемножителем 13, сумматором 17, квадратором 21 и интегратором 18. На вход этого контура (первый вход перемножителя 13) подается напряжение cosuJt с выхода генератора 1, На другой вход этого контура (второй вход сумматора 17) подается напряжение D, siii;vlt с выхода перемножителя 12. Решение уравнения D,j (t)D.2, (t)-(D,, sina)t+D,.j, cosoft) (Dtt, siiiuJt+DagCOSuJt) осуществляется в третьем и четвертом контурах, образованных перемножителем 11, сумматором 15, перемножителем 20, интегратором 16 (третий контур) и перемножителем 12, сумматором 17, перемножителем 20 и интегратором 16 (четвертый контур). На входы этих контуров (входы перемножителя 20) подаются напряжения D, sinu) costJt (с выхода :умматора 15) и D,sinaJt+ +D,jCOS«Jt (с выхода с мматора 17),
| Даровскнй Л.Н | |||
| Определение частотной характеристики при помощи решающих блоков электронной модели Автоматика и телемеханика, 1962, № 2, с | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
| Вавилов А.А., Солодовников А.И | |||
| Экспериментальное определение частотных характеристик автоматических систем | |||
| М.: Советское радио, 1963, с | |||
| Ударно-долбежная врубовая машина | 1921 |
|
SU115A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
