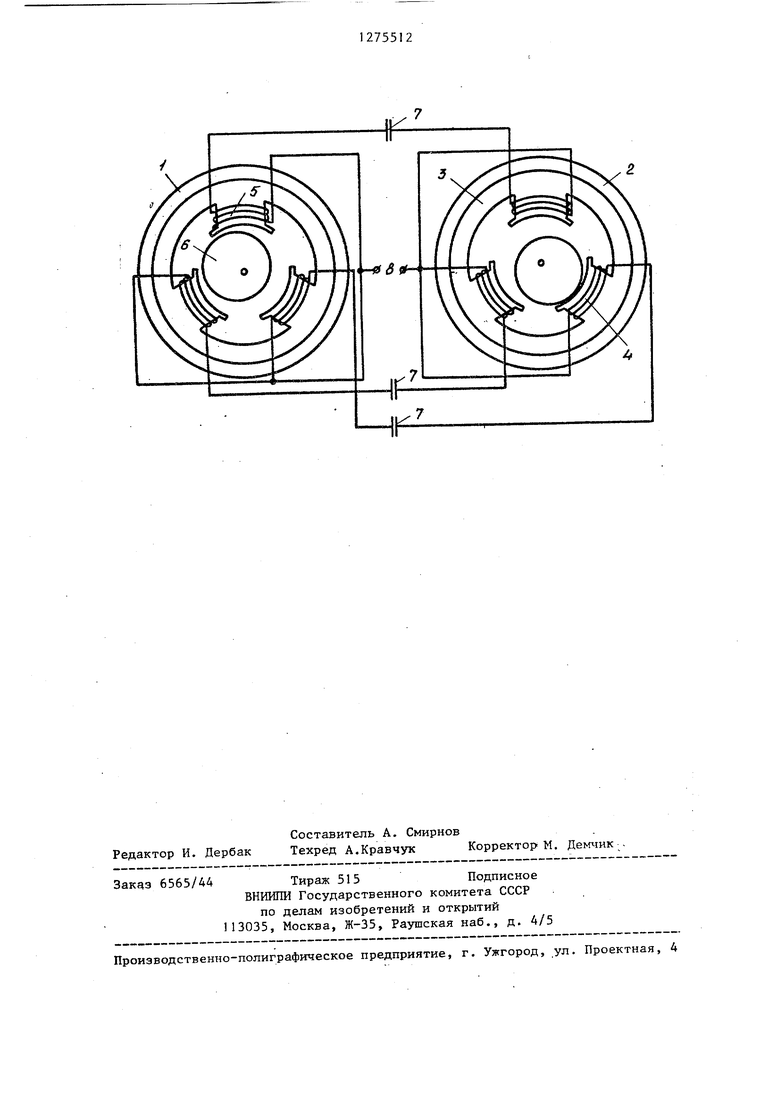
Изобретение относится if. автоматике и может быть использовано в системах автоматического управления объектами. Цель изобретения - повьшение точности устройства путем удельного синхронизирующего момента. На чертеже представлена схема устройства. . Устройство содержит датчик.1 и приемник 2, каждый из которых состоит из зубчатого статора 3, на зубцах 4 которого установлены обмотки 5, и ро тора 6 в виде цилиндрического магни топровода, установленного эксцентрично в статоре. Число обмотокстатора не менее трех, а размещены они равно.мерно по окружности статора. Соответствующие парные обмотки датчика 1 и приемника 2 через конденсаторы 7 подключены последовательно к источнику 8 однофазного переменного напряжения образуя последовательную резонансную цепь.
Условием выбора емкости С каждого 25та зксцентричных роторов, а действуюиз конденсаторов 7 и суммарной индук-щие магнитные силы создают синхронитивности Lg-L о 1 соответ-зирующий момент, чем осуществляется
ствующих обмоток 5 датчика 1 и прием-Синхронное вращение роторов 6 датчиника 2 является соотношение где - резонансная частота Так как ротор 6 эксцентричен в статоре 3, при настройке резонансных цепей суммарная величина зазора S +62 парными обмотками должна быть средней, а рабочая точка резонансной цепи для обеспечения максимального удельного синхронизирующего момента выбирается на перегибе восходящей ветви резонансной характеристики. Устройство работает следующим образом. При увеличении зазора S между зубцом 4 статора 3 датчика 1 и его . ротором 6 магнитное сопротивление в цепи датчика 1 увеличивается и индуктивность обмотки 5 датчика 1 уменьшается. Следовательно, увеличивается ток в резонансной цепи, образованной обмотками 5 датчика 1, приемника 2 и конденсатора 7, так как рабочая точка выбрана на восходящей ветви резонансной кривой. Увеличени1е тока ведет за собой увеличение силы притяжения ротора 6- к зубцу 4 приемника 2 до тех пор, пока сила, действующая со стороны зубца 4 приемника 2 не уравновесит силу со стороны зубца 4 датчика 1, а это произойдет тогда, когда суммарный зазор станет равен исходному. Аналогично осуществляется работа устройства при уменьшении зазора 8 , При этом индуктивность обмотки 5 датчика увеличивается вследствие уменьшения магнитного сопротивления в цепи датчика 1, ток в резонансной цепи уменьшается, уменьшается сила притяжения зубцом 4 ротора 6 приемни- ка 2, вследствие чего зазор iS в приемнике 2 увеличивается до те,х пор, пока суммарный зазор не восстанавливается до. исходного. При рабрте дистанционной передачи углового перемещения аналогичные процессы происходят в каждой резонансной цепи, причем изменение суммарного зазора происходит за счет поворока 1 и приемника 2. При этом, чем вьше добротность резонансной цепи, тем больше удельный синхронизирующий. момент. Формула изобретения Устройство для дистанционной передачи углового перемещения, содержащее датчик и приемник, каждый из которых вьтолнен в виде зубчатого статора с секционными обмотками, размещенными на зубцах, равномерно расположенных по окружности статора, и безобмоточного ротора в виде цилиндрического магнитопровода, установленного эксцентрично в статоре, и источник однофазного переменного напряжения, отличающееся тем, что, с целью повьшения точности устройства, в него введены конденсаторы по числу секционных обмоток, первый и второй выходы источника однофазного переменного напряжения подключены одним выводам обмоток датчика одним выводам обмоток приемника соответственно, другие вьшоды обмоток атчика через соответствующие конден-. саторы попарно подключены к другим вьшодам обмоток приемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двойной бесконтактный сельсин | 1978 |
|
SU758413A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2003 |
|
RU2267855C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОПЕРЕЧНЫМ МАГНИТНЫМ ПОТОКОМ (ВАРИАНТЫ) | 2018 |
|
RU2690666C1 |
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
| ПАЗОННЫЙ СПОСОБ МОДЕЛИРОВАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2137286C1 |
| Магнитная опора,совмещенная с датчиком угла | 1973 |
|
SU483578A1 |
| ОДНОФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ИНДУКТОРНОГО ТИПА | 1992 |
|
RU2040096C1 |
| Способ контроля неравномерности воздушного зазора электрической машины | 1985 |
|
SU1308958A1 |
| УСТРОЙСТВО ПОДВЕСА ФЕРРОМАГНИТНОГО СФЕРИЧЕСКОГО РОТОРА | 1996 |
|
RU2156441C2 |
Изобретение относится к автома тике и может быть использовано в системах автоматического управления объектами. Целью изо
| Устройство для дистанционной передачи угла вращения сельсинами | 1957 |
|
SU113778A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для дистанционной передачи угловых перемещений | 1981 |
|
SU964695A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
