Изобретение относится к области приборостроения и может быть использовано, например, в неконтактных гироскопах, акселерометрах и магнитных подшипниках.
Известны различные электромагнитные подвесы тел, основанные на использовании электромагнита, ток которого управляется (изменяется) в зависимости от изменения зазора между ним и подвешиваемым телом (ротором) таким образом, чтобы удалению тела от электромагнита соответствовало увеличение его тока [3, 4]. Использование трех пар диаметрально противоположно расположенных относительно подвешиваемого тела электромагнитов, установленных по трем взаимно ортогональным осям позволяет осуществить пространственный неконтактный подвес ферромагнитного тела, например, в виде шара, который может служить ротором гироскопа [2] или центрифуги [1, 3, 4].
Наиболее простым в конструктивном отношении является электромагнитный подвес сферического ротора, содержащий вместо шести электромагнитов всего два симметрично расположенных статора с пазами, в которых помещены сосредоточенные обмотки [4, стр. 257, рис 8.15]. Это устройство подвеса, принятое за прототип, содержит сферический ферромагнитный ротор, помещенный между двумя восьмиполюсными (с восемью зубцами и, соответственно, с восемью пазами, в которых размещены обмотки) статорами. Пары зубцов с обмотками образуют четыре тяговых электромагнита на первом и соответственно четыре тяговых электромагнита на втором статорах. В результате, в соответствии с правилом построения магнитных подвесов [4, стр. 29] образуются четыре оси, на каждой из которых находится пара диаметрально противоположных по отношению к сферическому ротору электромагнитов. (Эти четыре оси, например, могут представлять собой диагонали куба, в вершинах которого размещены указанные восемь электромагнитов). Наиболее простым источником тока питания электромагнита (увеличивающегося при увеличении зазора между ротором и электромагнитом) служит источник переменного напряжения, подключенный к электромагниту через конденсатор, образующий с индуктивностью обмотки несколько расстроенный (при центральном положении ротора), например, последовательный [4, стр. 28, рис 1.14] резонансный контур. При увеличении зазора индуктивное сопротивление обмотки электромагнита уменьшается и приближается к величине противоположного по знаку емкостного сопротивления конденсатора (к условию резонанса), в результате чего ток возрастает, создается восстанавливающая сила, удерживающая ротор в центре статора подвеса.
Недостатком устройства-прототипа является наличие четырех не ортогональных между собой осей подвеса, что, во-первых, приводит к увеличению числа источников тока (например, в виде конденсаторов в магнитно-резонансном подвесе), а, во-вторых, не позволяет обеспечить регулировку подвеса; центрирование ротора и выравнивание жесткости по трем ортогональным осям. Затруднено также введение изодромных корректирующих средств в источники тока питания электромагнитов для придания подвесу астатического свойства (высокого статического коэффициента усиления, при котором ротор практически находится в центре статоров подвеса при действии постоянного ускорения, например, в виде ускорения силы тяжести) - введение усиления, например, по одной из четырех неортогональных осей подвеса-прототипа приводит к смещению ротора по остальным трем, вызывая, например, насыщение этих каналов при их высоких статических коэффициентах передачи. Следует дополнительно подчеркнуть, что в случае реализации магнитного подвеса на двух описанных статорах с использованием активных усилительных источников тока [4, стр. 36] питания электромагнитов схема подвеса-прототипа по сравнению с резонансной усложняется более существенно, что повышает стоимость изделия, снижает его надежность.
Цель настоящего изобретения - упрощение схемы подвеса ротора, использующей наиболее простой конструктивный вариант с двумя статорами подвеса, улучшение показателей качества подвеса: достижение равножесткости, увеличение статического коэффициента усиления (статической жесткости подвеса).
Поставленная цель достигнута благодаря тому, что четыре обмотки каждого восьмиобмоточного статора подвеса через одну соединены параллельно или последовательно между собой, образуя соответственно первый и второй тяговые электромагниты, расположенные диаметрально противоположно по оси симметрии статоров, каждые две смежные из остальных обмоток соответственно первого и второго статоров соединены параллельно или последовательно и образуют четыре тяговых электромагнита, расположенных по двум другим осям, ортогональным между собой и оси симметрии статоров, а регулируемые по положению ротора источники тока подключены соответственно к клеммам шести тяговых электромагнитов.
На фиг. 1 показана конструкция подвеса сферического ротора с двумя статорами.
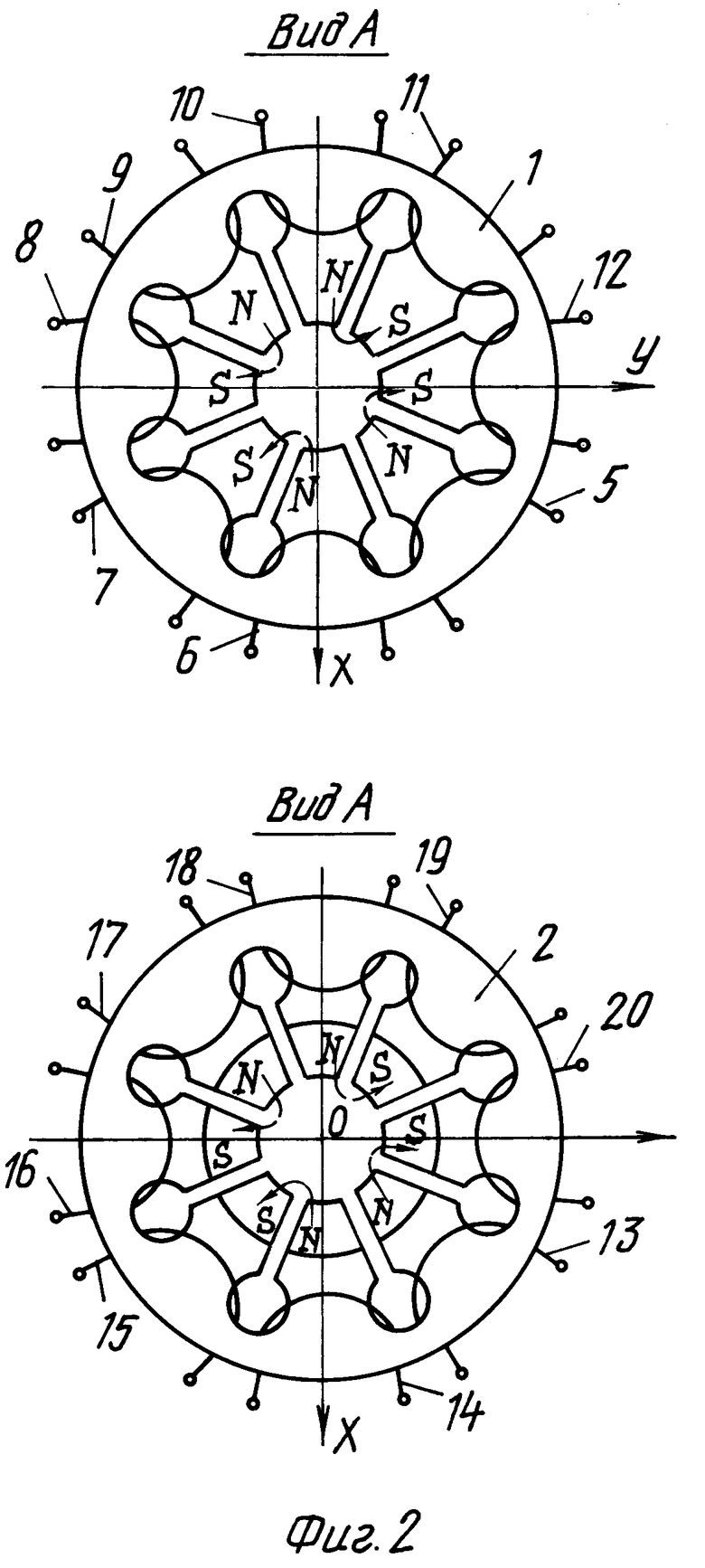
На фиг. 2 представлены первый и второй статоры с обмотками в пазах.
На фиг. 3 дана схема параллельного соединения обмоток, образующего клеммы шести тяговых электромагнитов, расположенных по трем взаимно ортогональным осям x, y, z.
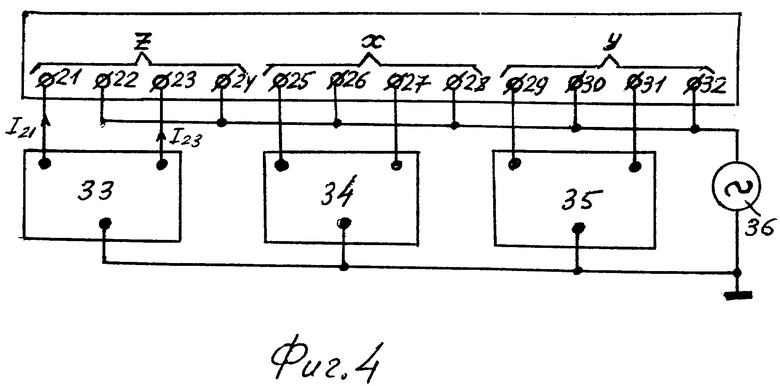
На фиг. 4 показано подключение регулируемых по положению ротора источников тока к клеммам статоров подвеса.
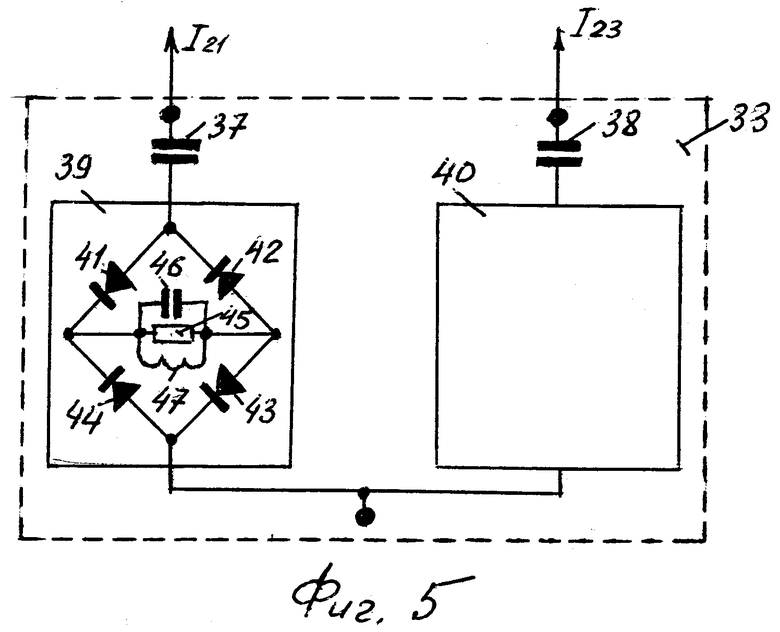
На фиг. 5 представлен источник тока для питания электромагнитов по резонансной схеме.
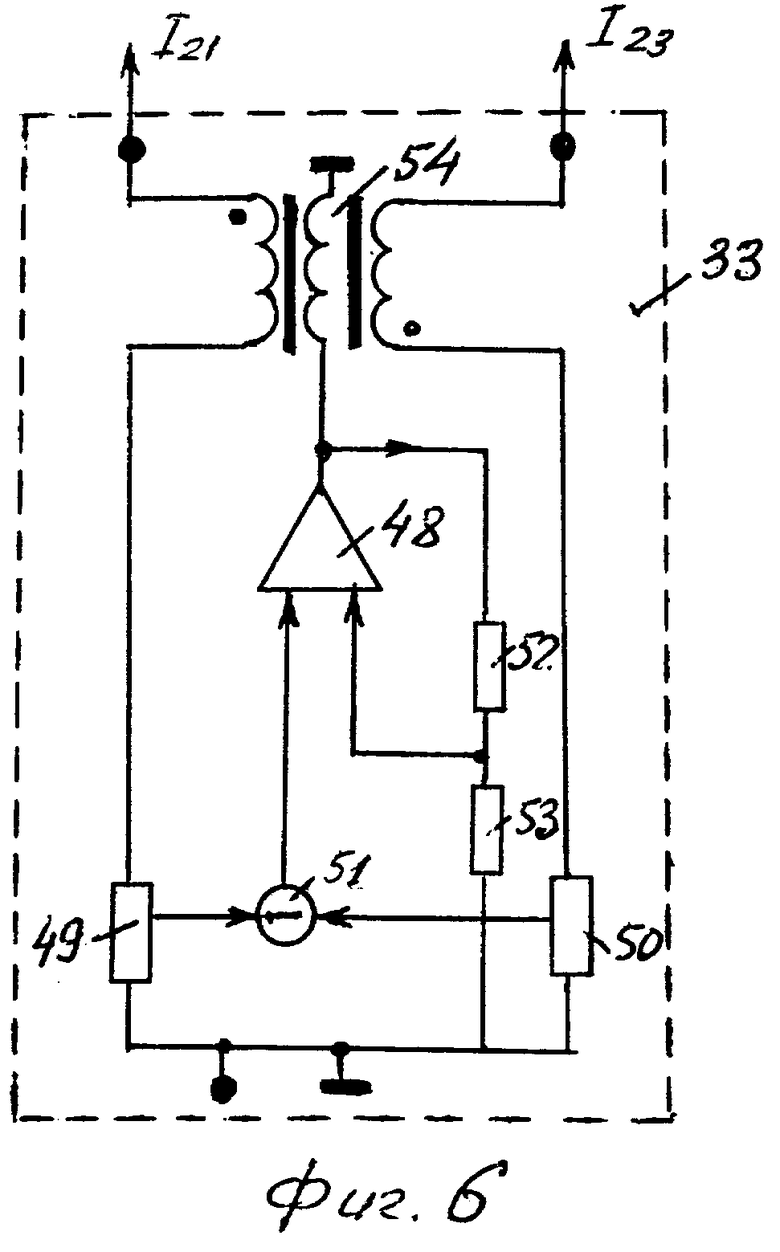
На фиг. 6 представлен источник тока, в котором использована активная схема регулирования тока электромагнита, с усилителем.
Устройство подвеса содержит (фиг. 1) первый статор 1, второй статор 2, ферромагнитный ротор 3, помещенный между статорами с номинальным зазором δ0 по отношению к ним, образованным сферической расточкой поверхностей, обращенных к ротору. Статоры 1 и 2 установлены в корпусе 4. Статор 1 (фиг. 2, вид сверху) имеет восемь обмоток 5-12 (обмотки условно показаны в виде одного витка, на фиг. 1 они заштрихованы в клеточку), уложенных соответственно в восемь пазов круглой формы. Статор 2 аналогичен статору 1 и содержит восемь обмоток 13-20. Как показано на фиг. 3, четыре обмотки 5, 7, 9, 11 (через одну) первого статора соединены между собой параллельно (или последовательно) и подключены к клеммам 21-22, образуя общую обмотку верхнего тягового электромагнита, расположенного на оси z (фиг. 1). Четыре обмотки 13, 15, 17, 19 (через одну) второго статора также соединены между собой аналогично соединению первого статора и подключены к клеммам 23-24, образуя общую обмотку нижнего тягового электромагнита, расположенного на оси симметрии статоров z. Смежные обмотки 6 и 14 (соответственно первого и второго статоров) соединены параллельно (или последовательно) между собой и подключены к клеммам 25 и 26, образуя общую обмотку бокового тягового электромагнита, расположенного по оси x (фиг. 1 и 2). Противоположный тяговый электромагнит на оси x образован соединением смежных обмоток 10 и 18, подключенных к клеммам 27 и 28. Соединения остальных смежных обмоток 8, 16 и 12, 20 аналогично образуют боковые тяговые электромагниты (клеммы 29-30 и 31-32), расположенные по оси y. Оси x, y, z взаимно ортогональны (декартова система координат). При параллельном или последовательном соединении обмоток выполняется условие образования четырехполюсной системы магнитных потоков N-S, показанных на фиг. 2 штриховыми линиями. Клеммы образованных шести электромагнитов подключены (фиг. 4) к источникам (регулируемым по положению ротора) тока 33-35, которые, в свою очередь, подключены к общему источнику 36 переменного питающего напряжения.
В качестве регулируемого по положению ротора источника тока может быть использована резонансная схема. На фиг. 5 показан такой источник тока, содержащий конденсаторы 37 и 38, включенные последовательно с корректирующими цепями 39 и 40 и с обмотками электромагнитов и образующие с ними резонансные LC-контуры, собственная частота которых несколько ниже частоты напряжения источника 36 [4, стр. 15-30] . При смещении ротора 3 (фиг. 1), например, против направления оси z (из-за ускорения силы тяжести) собственная частота контура, образованного обмоткой верхнего электромагнита (клеммы 21 и 22), ввиду уменьшения его индуктивности приближается к частоте источника напряжения, что вызывает увеличение тока I21 обмотки, соответствующее увеличению тяги электромагнита. Наоборот, ток I23 нижнего электромагнита уменьшается. Так формируются статически устойчивые тяговые характеристики электромагнитов, обеспечивающие центрирование подвешиваемого тела по отношению к статорам. Динамическая устойчивость (демпфирование колебаний подвешенного тела) обеспечивается корректирующими цепями, в качестве которых может быть использован выпрямительный мостик на диодах 41-44 с RC-нагрузкой (резистор 45, конденсатор 46), обеспечивающий выработку дополнительного (демпфирующего) тока, пропорционального скорости движения ротора. С целью повышения статического коэффициента усиления канала регулирования тока (введение аналога изодромного звена) может быть применена катушка индуктивности 47, обеспечивающая ввиду ее малого омического сопротивления высокую добротность резонансного контура.
На фиг. 6 показан источник регулируемого тока, реализующий активную схему подвеса с усилителем 48, охваченным положительной обратной связью по току, пропорциональному разности токов обмоток противоположных электромагнитов (датчики тока 49-50, вычитающее устройство 51), и отрицательной обратной связью по выходному напряжению усилителя (резистивный делитель 52-53). В этом случае статическая тяговая характеристика формируется благодаря введению (через выходные обмотки трансформатора 54, подключенного к выходу усилителя) дополнительных токов, пропорциональных смещению ротора. Демпфирующие и изодромные цепи на схеме не показаны (входят в состав усилителя).
Предложенное устройство подвеса сферического ферромагнитного ротора по сравнению с прототипом благодаря преобразованию четырехосной системы электромагнитов (традиционно используемой для наиболее конструктивно простого подвеса с двумя статорами) в трехосную позволяет уменьшить число источников регулируемого тока с четырех до трех (что особенно существенно при активной схеме с усилителями). Известные трехосные системы подвесов требуют шесть отдельных электромагнитов, попарно расположенных на взаимно ортогональных осях, что приводит к значительному усложнению конструкции подвеса и - в более значительной степени - к усложнению конструкции изделия с таким подвесом, например гироскопа, в котором необходимо разместить ряд дополнительных элементов, датчики угла, момента, статор вращения ротора, и желательно по осям симметрии, которые уже могут быть использованы для расположения указанных шести электромагнитов. Кроме этого, предложенный подвес позволяет проводить регулировку усиления по трем независимым осям, достигая равножесткости, и вводить изодромные цепи, обеспечивая астатизм первого порядка (на практике большой статический коэффициент усиления), что обусловливает при постоянных инерционных нагрузках удержание ротора силами магнитного поля в центре камеры подвеса.
Список литературы
1. Кацнельсон О.Г., Эдельштейн А.С. "Автоматические измерительные приборы с магнитной подвеской". М.; "Энергия", 1970.
2. Малеев П.И. "Новые типы гироскопов", Л, "Судостроение", 1971.
3. Вышков Ю. А. , Иванов В. И. "Магнитные опоры в автоматике", М., "Энергия", 1978.
4 Осокин Ю.А. Герди В.Н., Майков К.А., Станкевич Н.Н. "Теория и применение электромагнитных подвесов", М, "Машиностроение", 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2015 |
|
RU2579156C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2015 |
|
RU2577553C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| НЕКОНТАКТНЫЙ ПОДВЕС РОТОРА | 2013 |
|
RU2545310C2 |
| ШПИНДЕЛЬ | 2008 |
|
RU2370344C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ВЕКТОРА КИНЕТИЧЕСКОГО МОМЕНТА НЕКОНТАКТНОГО ГИРОСКОПА | 1993 |
|
RU2065134C1 |
| СОВМЕЩЕННЫЙ ДАТЧИК МОМЕНТА И СМЕЩЕНИЯ ТЕЛА | 1998 |
|
RU2209393C2 |
| БЕСПОДШИПНИКОВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2562448C1 |
| ДЕМПФЕР ДЛЯ ЭЛЕКТРОМЕХАНИЧЕСКИХ УСТРОЙСТВ ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2193122C2 |

Использование: в приборостроении, например в неконтактных гироскопах, акселерометрах, магнитных подшипниках. Устройство содержит два статора с восемью пазами и помещенными в них восемью сосредоточенными обмотками. Четыре обмотки каждого статора через одну соединены параллельно или последовательно между собой и образуют первый и второй тяговые электромагниты, расположенные диаметрально противоположно по оси симметрии статоров. Каждые две смежные из остальных обмоток соответственно первого и второго статоров соединены параллельно или последовательно и образуют четыре тяговых электромагнита, расположенных по двум осям, ортогональным между собой и оси симметрии статоров. Источники тока подключены к клеммам шести тяговых электромагнитов. Устройство позволяет упростить схему подвеса, уменьшить число источников регулируемого тока, обеспечивает возможность введения изодромных звеньев (для уменьшения статического провисания ротора) и регулировки жесткости по трем взаимно ортогональным осям подвеса. 6 ил.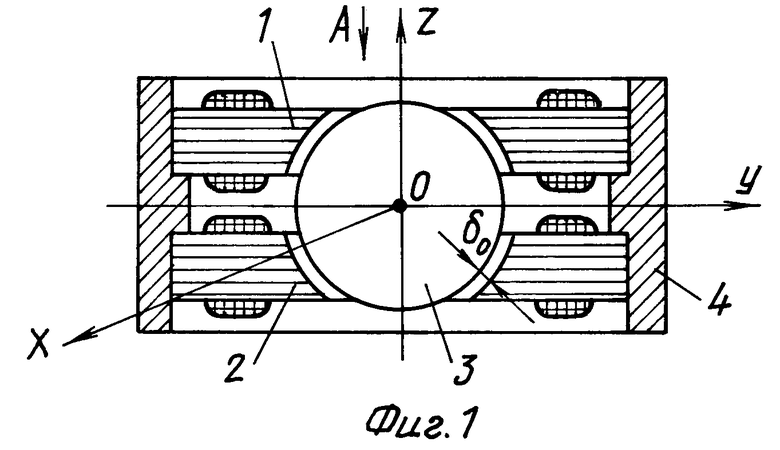
Устройство подвеса ферромагнитного сферического ротора, содержащее два статора с восемью пазами и помещенными в них восемью сосредоточенными обмотками и регулируемые по положению ротора источники тока питания обмоток, отличающееся тем, что четыре обмотки каждого статора через одну соединены параллельно или последовательно между собой и образуют первый и второй тяговые электромагниты, расположенные диаметрально противоположно по оси симметрии статоров каждые две смежные из остальных обмоток соответственно первого и второго статоров соединены параллельно или последовательно и образуют четыре тяговых электромагнита, расположенных по двум осям, ортогональным между собой и оси симметрии статоров, а регулируемые по положению ротора источники тока питания обмоток подключены соответственно к клеммам шести тяговых электромагнитов.
| Осокин Ю.А | |||
| и др | |||
| Теория и применение электромагнитных подвесов | |||
| - М.: Машиностроение, 1980, с.256-258 | |||
| Устройство с магниторезонансным подвесом ротора | 1991 |
|
SU1795284A1 |
| RU 2064163 C1, 20.07.1996 | |||
| RU 94010338 A1, 20.11.1995 | |||
| US 3678765 25.07.1972. | |||
