Изобретение относится к системам управления промьшшенными механизмами с приводами вращательного либо поступательного движения (вращающиеся или линейные двигатели, гидроци- линдры, пневмоприводы и т.п.), обеспечивающими совместное поступательное движение с заданным рассогласованием.
Целью изобретения является повышение надежности устройства для управ Ленин взаимосвязанньм движением механизмов путем создания автоматического управления взаимосвязанным движением механизмов, в соответствии с которым измеряют координату ведущего механизма Х; и координату ведомого механизма Х, определяют разность этих координат и при достижении условия X. - Хо +6 производят периоди г г. , . , ческое включение привода ведомого
механизма с постоянной скоростью V, превьшающей скорость ведущего механизма Vj , и отключают указанный привод при разности координат Х Х
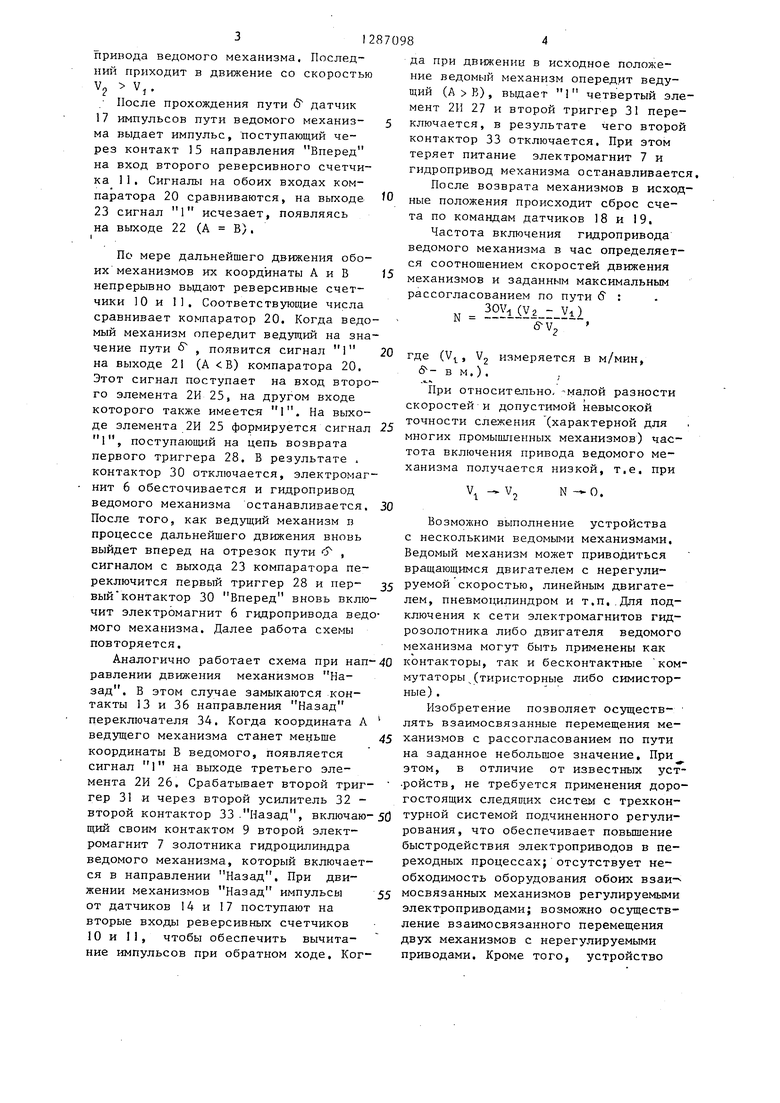
На фиг,1 представлена функциональная схемд силовых цепей электропривода ведущего механизма с блоком реверсивного управления вращением двигателя; на фиг,2 - схема включения электромагнитов гидрозолотника ре- версивного управления гидроДилинд- . ром привода ведомого механизма; на фиг.З - принципиальная электрическая схема устройства автоматического управления взаимосвязанным движением механизмов ,
Устройство содержит регулируемый электропривод ведущего механизма, состоящий из двигателя 1, вентильного преобразователя 2 с системой 3 регулирования и блока реверсивного управления движением с контактами надг равления Вперед 4 и Назад 5 соответствующих реле,
Ведомый механизм снабжен нерегулируемым гидроприводом с гидроцилиндром, управляемым золотником с электромагнитами 6 и 7 реверсивного управ- .ления, подключаемыми к сети соответст ченно через контакты 8 и 9 контакторов направления Вперед и Назад.
управления движением содержит также два реверсивных счетчика 10 и 11, Счетные входы первого счет- чика 10 через контакты 12 и 13 направления движения Вперед и Назад подключены к датчику 14 импульсов пути ведущего механизма. Счетные вхо
5
П
5
0
0
5
ды второго счетчика 1 I контакты 15 и 16 направления движения Вперед и Назад подключены к датчику 17 импульсов пути ведомого механизма. Цепи возврата (сброса) счетчиков 10 и 11 соединены соответственно с датчиком 18 исходного положения ведущего механизма и аналогичным датчиком 19 ведомого механизма. Выходы счетчиков 10 и 1I подключены ко входам цифрового компаратора 20, имеющего три выходные цепи 21 - 23.
К выходам 21 и 23 компаратора 20 подключены, как показано на фиг.З четыре элемента 2И 24 - 27. К выходам первого и второго элементов 2И 24 и 25 подключен первый триггер 28,- наг руженный на первый усилитель 29, и первый контактор 30 направления движения Вперед ведомого механизма.
Соответственно выходы третьего и четвертого элементов 2И 26 и 27 соединены со вторым триггером 31, нагру- женным на второй усилитель 32 и второй контактор 33 направления Назад В переключатель 34 направления жения входят контакты 12, 13, 15, 16
35и 36, Контакты 35 и 36 подключены к источнику 37 по.стоянного напряжения .
Входы элементов 2И 24 и 25 соединены также с контак том 35 направления Вперед переключателя 34, а входы элементов 2И 26 и 27 - с контактом,
36направления Назад.
Двигатель 1 начинает перемещать ведущий механизм в направлении Впе- . ред со скоростью V после подаЧи с контактом реле 4 задающего напряжения на систему 3 регулирования вентильного преобразователя 2. После перемещения ведущего механизма на расстояние б датчик 14 выдает импульс, поступающий через контакт 12 Вперед переключателя 34 на вход первого реверсивного счетчика 10. Соответствзпо- щие сигналы появляются на выходе счетчика 10 и выходе 23 (А В) компаратора 20, При этом на входы первого элемента 2И 24 от компаратора 20 и от источника 37 постоянного напряжения через контакт 35 направления Вперед поступают сигналы 1. Срабатьшает первый триггер 28, кото- рьй через первый усилитель 29 включает первый контактор 30 Вперед, контакт 8 которого электромагнит 6 золотника гидроцилиндра
привода ведомого механизма. Последний приходит в движение со скоростью V V,.
После прохождения пути датчик 17 импульсов пути ведомого механиз- ма выдает импульс, поступающий через контакт 15 направления Вперед на вход второго реверсивного счетчика 11, Сигналы на обоих входах компаратора 20 сравниваются, на выходе 23 сигнал 1 исчезает, появляясь
на выходе 22 (А В), I
По мере дальнейшего движения обоих механизмов их координаты А и В непрерывно выдают реверсивные счетчики 10 и 11, Соответствующие числа сравнивает компаратор 20. Когда ведомый механизм опередит ведущий на значение пути 5 , появится сигнал 1 на выходе 21 (А В) компаратора 20, Этот сигнал поступает на вход второго элемента 2И 25, на другом входе которого также имеется 1. На выходе элемента 2И 25 формируется сигнал 1, поступающий на цепь возврата первого триггера 28, В результате , контактор 30 отключается, электромагнит 6 обесточивается и гидропривод ведомого механизма останавливается. После того, как ведущий механизм в процессе дальнейщего движения вновь выйдет вперед на отрезок пути fj , сигналом с выхода 23 компаратора переключится первый триггер 28 и пер- вый контактор 30 Вперед вновь включит электромагнит 6 гидропривода ведомого механизма. Далее работа схемы повторяется.
Аналогично работает схема при направлении движения механизмов Назад, В этом случае замыкаются контакты 13 и 36 направления Назад переключателя 34, Когда координата А ведущего механизма станет меньше координаты В ведомого, появляется сигнал 1 на выходе третьего элемента 2И 26, Срабатывает второй триг- гер 31 и через второй усилитель 32 - второй контактор 33 .Назад, включающий своим контактом 9 второй электромагнит 7 золотника гидроцилиндра ведомого механизма, который включается в направлении Назад, При движении механизмов Назад импульсы от датчиков 14 и 17 поступают на вторые входы реверсивных счетчиков 10 и 11, чтобы обеспечить вычитание импульсов при обратном ходе. Когда при движении в исходное положение ведомый механизм опередит ведущий (А В), выдает I четвертый элемент 211 27 и второй триггер 31 переключается, в результате чего второй контактор 33 отключается. При этом теряет питание электромагнит 7 и гидропривод механизма останавливается
После возврата механизмов в исходные положения происходит сброс счета по командам датчиков 18 и 19.
Частота включения гидропривода ведомого механизма в час определяется соотношением скоростей движения механизмов и заданным максимальным рассогласованием по пути 6 :
N
2YiiY2 : Vi}
v.
где (V, V2 измеряется в м/мин, (S - в м,),
.«.
При относительно, -малой разности скоростей и допустимой невысокой точности слежения (характерной для многих промышленных механизмов) частота включения привода ведомого механизма получается низкой, т.е. при
V.
V.
N
О.
Возможно выполнение устройства с несколькими ведомьми механизмами. Ведомый механизм может приводиться вращающимся двигателем с нерегулируемой скоростью, линейным двигателем, пневмоцилиндром и т,п..Для подключения к сети электромагнитов гидрозолотника либо днигателя ведомого механизма могут быть применены как контакторы, так и бесконтактные коммутаторы (тиристорные либо симистор- ные) ,
Изобретение позволяет осуществ- лять взаимосвязанные перемещения механизмов с рассогласованием по пути на заданное небольшое значение, При этом, в отличие от известных уст- .ройств, не требуется применения дорогостоящих следящих систе1 1 с трехкон- турной системой подчиненного регулирования, что обеспечивает повьшение быстродействия электроприводов в переходных процессах; отсутствует необходимость оборудования обоих взаи- мосвязанных механизмов регулируемыми электроприводами; возможно осуществление взаимосвязанного перемещения двух механизмов с нерегулируемыми приводами. Кроме того, устройство
можно применять на самоходных механизмах, а также механизмах, не имеющих вращающихся валов для подключения импульсных датчиков пути (устройства с линейными двигателями, гидро- и пневмоцилиндрами), и на комбинированных системах с приводами вращательного и поступательного движения, в том числе с нерегулируемой скоростью.
Формула изобретения
Устройство для управления взаимосвязанным движением механизмов, содержащее конечные выключатели, датчик импульсов пути ведущего механизма, датчик импульсов пути ведомого механизма, источник постоянного напряжения, выходы которых соединены с соответствующими входами переключателя, отличающееся тем, что, с целью повышения надежности устройства, оно содержит первый и
10
15
20
довательно соединенные первый триггер, первьй усилитель.и первый контактор и последовательно соединенные второй триггер, второй усилитель и второй контактор, при этом первый выход пе- рехлючателя соединен с первыми входами первого и второго элементов 2И, второй выход переключателя соединен с первыми входами третьего и четвертого элементов 2И, с первым выходом цифрового компаратора связаны вторые входы второго и третьего элементов 2И, со вторым выходом цифрового компаратора - вторые входы первого и четвертого элементов 2И, выходы переключателя через первый реверсивный счетчик соединены с первым входом цифрового компаратора, а четвертые входы переключателя через второй реверсивный счетчик соединены со вторым входом цифрового компаратора, выходы первого и второго элементов 2И соединены с соответствую- .щими входами первого триггера, а вывторой реверсивные счетчики, цифро-. 25 ходы третьего и четвертого элементов, вой компаратор, первый, второй, тре- 2И - тий и четвертый элементы 2И, после- рого
с соответствующими входами втог триггера.
5
0
довательно соединенные первый триггер, первьй усилитель.и первый контактор и последовательно соединенные второй триггер, второй усилитель и второй контактор, при этом первый выход пе- рехлючателя соединен с первыми входами первого и второго элементов 2И, второй выход переключателя соединен с первыми входами третьего и четвертого элементов 2И, с первым выходом цифрового компаратора связаны вторые входы второго и третьего элементов 2И, со вторым выходом цифрового компаратора - вторые входы первого и четвертого элементов 2И, выходы переключателя через первый реверсивный счетчик соединены с первым входом цифрового компаратора, а четвертые входы переключателя через второй реверсивный счетчик соединены со вторым входом цифрового компаратора, выходы первого и второго элементов 2И соединены с соответствую- .щими входами первого триггера, а вы5 ходы третьего и четвертого элементов, 2И - рого
третьего и четвертого элементов,
с соответствующими входами втог триггера.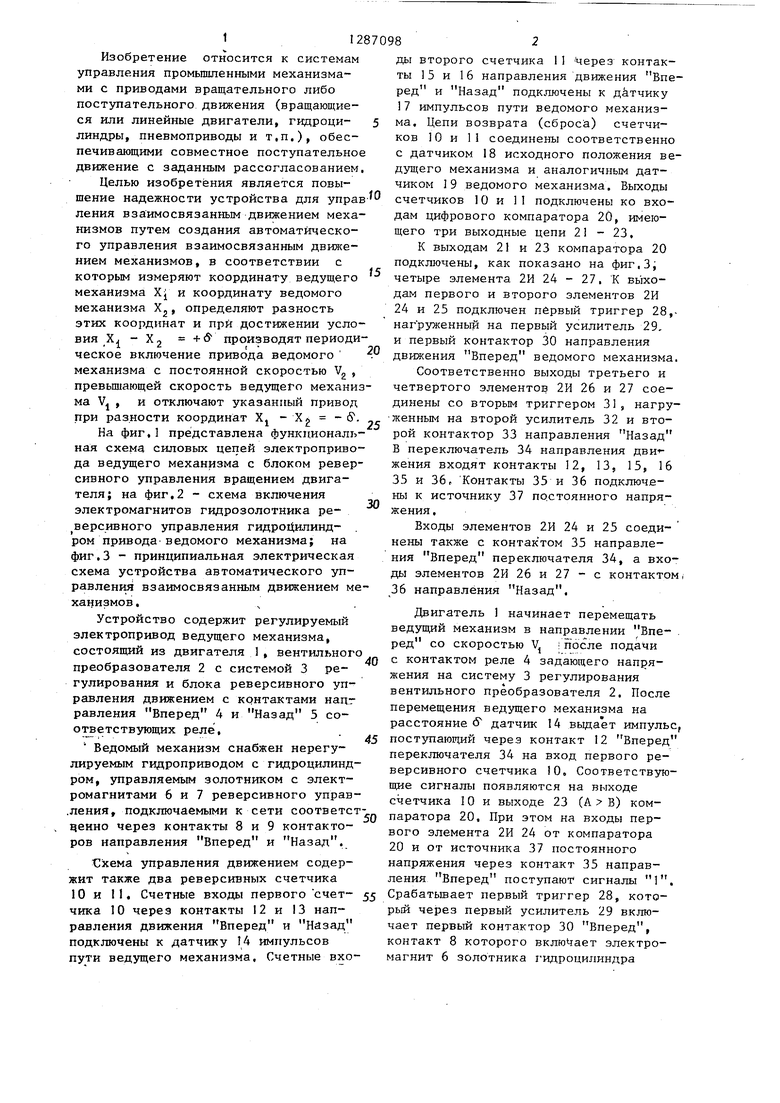
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления линией приготовления многокомпонентных смесей | 1988 |
|
SU1649504A1 |
| Устройство для измерения мертвого хода зубчатых передач | 1987 |
|
SU1428910A1 |
| ЗУБОДОЛБЕЖНЫЙ СТАНОК | 1991 |
|
RU2025233C1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Лотовый уровнемер | 1986 |
|
SU1381338A1 |
| Устройство для управления перемещением метки по экрану индикатора | 1983 |
|
SU1188767A1 |
| Система автоматического контроля работы электропушки для забивки чугунной летки доменной печи | 1988 |
|
SU1615188A1 |
| Система управления вытягивающими валками установки непрерывного литья | 1987 |
|
SU1475766A1 |
| Система для программного управления | 1985 |
|
SU1251033A1 |
| Устройство управления электрофицированной дождевальной машиной | 1988 |
|
SU1547783A1 |
Изобретение относится к системам управления движением взаимосвязанных движущихся объектов. Целью изобре-1- г ния является повышение надежности устройства управления. Устройство содержит конечные выключатели 18 и 19, переключатель 36, источник питания 37, ведущий механизм, состоящий из двигателя 1, тиристорного преобразователя 2, блока управления 3 и блока 4 реверсивного управления. Положительный достигается за счет введения реверсивных счетчшсов 10 и 11, компаратора 20, логических элементов 2И 24 - 27, триггеров 28 и 31, усилителей 29 и 32 и .контакторов 30 и 33 и новых связей. 3 ил. с со 00
фиг. 7
Редактор К.Волощук
Составитель А.Лащук Техред М.Ходанич
Заказ 7713/49 Тираж 862Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
ФУ8.2
Корректор М.Пожо
| Патент США № 3571685, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
