ю
vj
DO
ел
00
«
Изобретение относится к баланснроночной технике, а именно к средствам автоматической балансировки коленчатых валов.
Целью изобретения является повьшшние производительности процесса балансировки трехплоскостных коленчатых валов путем автоматизации цикла коррекции.
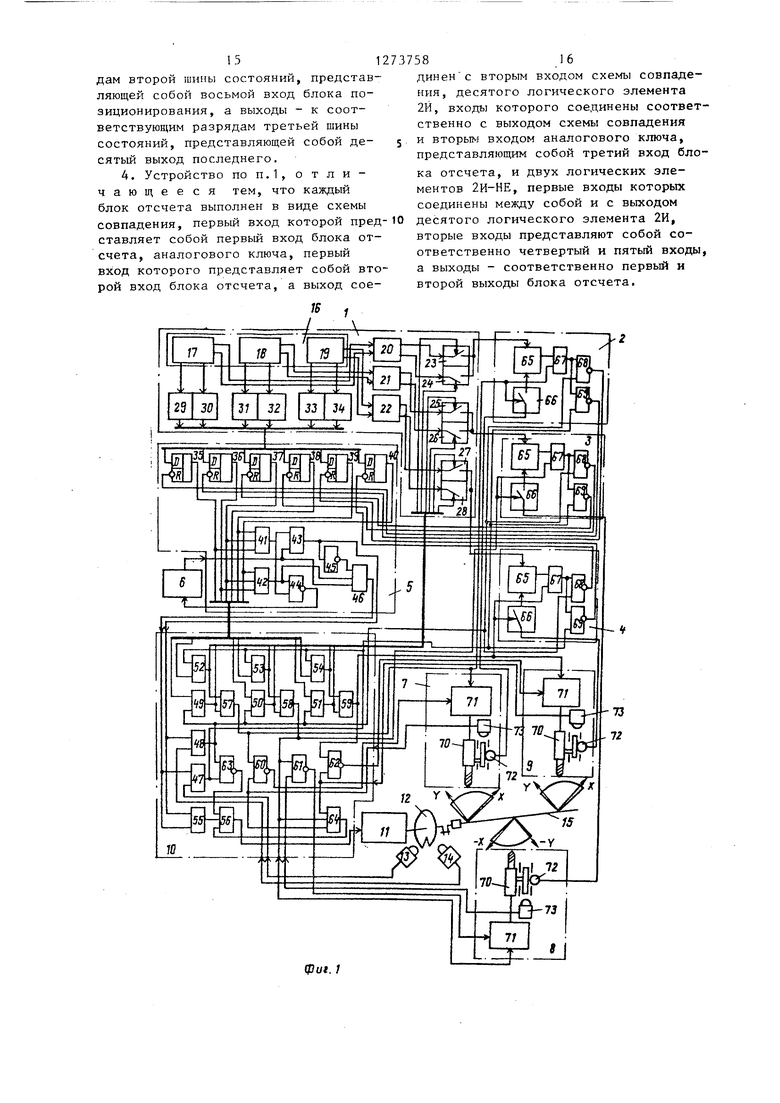
На фиг.1 изображена функциональная схема устройства для коррекции дисбаланса коленчатого вала; на фиг.2 - временные диаграммы работы элементов устройства, на которых представлены уровни или форма напряжения на выходах элементов, номера которых соответствуют номеру элементов на фиг. 1 (через t обозначено время начала коррекции, через t конец коррекции по осевой плоскости X, через tg - конец коррекции по осевой плЬскости У), .
Устройство содержит блок 1 измерения, три блока ZyS и 4 отсчета первые входы которых соединень соответственно с первым, третьим и чет.вертым выходами блока 1 измерения, блок 5 формирования команд, первый вход которого соединен с вторым выходом блока.1 измерения, второй и третий входы - соответственно с первым и вторым выходами блока 2 отсчета, пятый и шестой входы - соответственно с первым и вторым выходами блока 3 отсчета, а седьмой и восьмой входы - соответственно с первым и вторым выходами блока 4 отсчета, бло 6 управления, вход и выход которого соединены соответственно с первым вь ходом и с четвертьм входом блока 5 формирования команд, три узла 7,8 и 9 коррекции, первые выходы которых соединены соответственно с вторыми входами блоков 2-4 отсчета,, блок 10 позиционирования, Ъервый вход и первый выход которого соединены соответственно с вторым выходом и с первым входом узла 7 коррекции, четвертый вход и шестой выход - с вторьм выходом и первым входом узла 8 коррекции пятый вход и восьмой выход с вторым выходом и первым входом узла 9 коррекции, четвертый выход с соединенными между собой четвертьши входами блоков 2-4 отсчета, пятый выход с соединенными между собой пятыми входами блоков 2-4 отсчета, второй выход - с вторым входом узла 7 кор737582
1Гёкции и с третьим входом блока 2 отсчета, седьмой выход - с вторым входом узла 8 коррекции и с третьим входом блока 3 отсчета, девятый вы5 ход - с вторым входом узла 9 коррекции и третьим входом блока 4 отсчета десятый выход - с первым входом блока 1 измерения, а шестой, седьмой и восьмой входы соответственно с вторым, третьим и четверт)1м выходами
блока 5 формирования команд, привод 11 установочного, вращения, вход которого соединен с Третьим выходом блока 10 позиционирования металлический диск 12 с прорезью, установленный на выходном валу привода 11 установочного вращения,, два датчика 13 и 14 ориентации по координате, выходы которых соединены соответственно с вторым и третьим входами блока 10 позиционирования, и коленчатый вал 15, кинематически связанный с выходным валом привода 11 установочного вращения,
Блок 1 измерения выцолнен в виде трехканального измерителя 16, каждый из трех каналов 17-19 которого вьщает информацию о параметрах дисбаланса соответственно в левом, средних
и правом противовесах коленчатого
вала по осям коррекции X и У, обозначенным пунктирными линиями на коленчатом ва.лу 15, трех аналоговых запоминающих блоков 20-22, входы которых
соединены соответственно с выходами левого канала 17, среднего канала 18 iH правого канала 19, первого и второго аналоговых ключей 23 и 24, первый вход, каждого из которых соединен с
одним из выходов запоминающего блока 20, а выходы соединены между собой и представляют собой первый выход блока 1 измерения, третьего и четвертого аналоговых ключей 25 и 26,
первый вход каждого из которых соед.инен с одним из выходов запоминающего блока 21 ,, а выходы соединены между собой и представляют собой третий выход блока 1 измерения, пятого и
шестого ана.логовьгх ключей 27 и 28, первый вход каждого из которых соединен с одним из выходов запоминающего б.лока 22. а выходы соединены между собой и представляют четвертый блока 1 измерения, вторые входы аналоговых ключей 23-28 предназначены для подключения к соответствующим разрядам третьей шины состояний, коплоскости X. в момент совпадения про рези диска 12 с торцом датчика 14 на выходе датчика 14 появляется высо кий уровень напряжения, который поступает на второй вход логического . элемента 2И 48, на выходе которого появляется высокий уровень, поступаю щий на второй вход логического элемента ЗИ, 56 и останавливающий вращение коленчатого вала 15. Одновременно высокий уровень с выхода логического элемента 2И 48 поступает на первые входы логических элементов 2И 49, 50 и 51 и на вторые входы логических элементов 2И-НЕ 68 в блоках 2,3 и 4 отсчета. Высокие уровни напряжения появляются на выходах.логических элементов 2И 49 и 51 (в единичном с-остоянии находятся триггеры 35 И.39)9 поступают на входы логических элементов ИЛИ 57 и 59 и на управ ляющие входы аналоговых ключей 24 и 28 и открывают аналоговые ключи 24 и 28. С выходов логических элементов ИЛИ 57 и 59 высокий уровень поступает в блокк 2 и 4 отсчета на вторые входы аналоговых ключей 66 и в узлы 7 и 9 коррекции на вторые входы приводов 71 исполнительного механизма, представляющих собой, например, гидЬоцилиндр с двумя золотниками для управления ходами Вниз и Вверх, Начинается перемещение вниз исполнительных механизмов 71 в узлах 7 и 9 коррекции. При открытых аналоговых ключах 24 и 28 информация о заданных в результате измерения глубинах свер ления по координатам X в левом и пра вом противовесах коленчатого вала 15 поступает соответственно в блоки 2 и 4 отсчета на входы схемы 65 совпадения, в качестве которой применен, например, вычитатель с нуль-органом на выходе. На другие входы схемы 65 совпадения в блоки 2 и 4 отсчета приходят;сигналы с выходов датчиков 72 отсчета перемещений соответственно узлов 7 и 9 коррекции. I Каждый из датчиков 72 отсчета перемещений пред ставляет собой, например, вращающий- 50 ИЛИся трансформатор со схемой линеаризации выходного напряжения от угла поворота. При совпадении глубины сверления в противовесах коленчатого вала 15 с заданной по координатам X в запоминающих блоках 20 и 22 на выходах схем 65 совпадения появляется высокий уровень, который поступает
является низкий уровень и останавливает вращение коленчатого вала 15. Противовесы коленчатого вала 15 в этом случае устанавливаются под исполнительные механизмы 70 таким образом, что оси сверления расположены в осевой плоскости У. С выхода логи еского элемента 2И 47 высокий урона вход логического элемента 2Н 6-7 и далее на вход логического элемента 2И-НЕ 68, низкий уровень с выхода которого из блока 2 отсчета поступает на R-вход триггера 35, а из блока 4 отсчета - на R-вход триггера 39 и устанавливает их в нулевое состояние. Низкий уровень напряжения появляется на выходах триггеров 35 и 39 и далее на выходах логических элементов 2И 49 и 51, закрываются аналогично ключи 24 и 28, а на первые входы приводов 71 подачи исполнительных механизмов в узлах 7 и 9 .коррекции поступает высокий уровень с выходов логических элементов ИЛИ-НЕ 60 и 62 и дает команду на отвод исполнительных механизмов 70 в узлах 7 и 9 коррекции. По достижении исходного положения исполнительными механизмами 70 на выходах, датчиков 73 исходного положения появляется высокий уровень напряжения, на выходе логического элемента ЗИ 64 также появляется высокий уровень напряжения, который поступает на третий вход логического элемента ЗИ 56. Так как в этот момент на выходах триггеров 35, 37 и 39, относящихся к осевой плоскости X, присутствует низкий уровень напряжения, на выходах логических элементов ЗИПИ 41 и 2И 43 - также низкий уровень, а на выходе инвертора 45 - высокий уровень, который поступает на третий вход логического элемента ЗИ 46, и на выходе последнего появляется высокий уровень напряжений. Одновременно с возвращением исполнительных механизмов 70 в исходное положение привод 11 начинает вращать коленчатый вал 15. Вращение продолжается ди тех пор, пока прорезь на диске 12 не совпадет с торцом датчика 13 ориентации коленчатого вала, на выходе датчика 13 появляется высокий уровень напряжения, который поступает на второй вход логического элемента 2И 47, высокий уровень с выхода которого поступает на вход логического элемента НЕ 63. На выходе последнего по7плоскости Х, а триггеры 30, 32 и 34 в осевой плоскости У. Выходы каждог из триггеров 29-34 подключен к одно му из разрядов шины состояний, кото рая является первым выходом блока 1 измерения. В процессе измерения могут получиться различные состояния триггеров 29-34. Но в одной осевой плоскости X или У одновременно могут обрабаты ваться не более двух проекций. Наибо лее общим является случай, когда в осевой плоскости X проекция будет производиться в крайних противовесах коленчатого вала (триггеры 29 и 34 в единичном состоянии), а в осевой плоскости-У - в левом и среднем противовесах (триггеры 30 и 32 в единичном состоянии). Параметры дисбаланса коленчатого вала 15 измеряются и запоминаются в трехканальном измерителе 16. Аналого вая информация о параметрах дисбаланса в каждом из противовесов колен чатого вала для каждой из осевой коррекции передается После окончания измерения в запоминающие блоки 022. Одновременно измеритель 16 с помощью компараторов (не показаны), установленных на выходе каждой из координат и настроенных на минимальный уровень, соответствующий остаточному дисбалансу коленчатого вала по координате, определяют необходимость коррекции дисбаланса по каждой из координат и выдает эту информацию на триггеры . Если по какой-либо координате требуется произвести коррекцию дисбаланса, то соответствующий этой координате триггер по окончании измерения устанавливается в единичное состояние. Таким образом, перед началом коррекции дис баланса коленчатого вала 15 имеется информация в запоминающих блоках 20-22 о глубине сверления по каждой из.координат и информация, записанная в триггерах 29-34, о необходимости сверления отверстий в противовесах коленчатого вала 15. Перед началом коррекции исполнительные механизмы 70 представляющие собой, например, сверлильные головки в узлах 7-9 коррекции находятся ввер ху, т,е. в исходном положении, кото рое контролируется датчиками 73 исходного положения, каждый из которых представляет собой бесконтактный кон 588 цевой выключатель. Выход каждого из триггеров 29-34 соединен с соответствующим р-входом триггеров 35-40, причем выход триггера 29 соединен с D-входом триггера 35, триггера 30 с D-входом триггера36 и т.д. по по-. рядку. Поэтому состояние выходов триггеров 35-40 перед началом коррекции совпадает с состоянием триггеров 29-34, т.е. на выходах триггеров 35 и 36, 38 и 39 присутствует высокий уровень - 1. В соответствий с этим на выходах логических элементов ЗИПИ 41 и 42 также высокий уровейь напряженияГ По команде Начало коррекции (момент tf на фиг.2) на первые вы- ходы логических элементов 2И 43 и ЗИ 46 поступает высокий уровень напряжения с выхода блока 6 управления, и на выходе логического элемента 2И 43 появляется высокий уровень напря-жения, который поступает на первые входы логических элементов 2И -48 и И.ПИ 55. Если в момент t прорезь на металлргческом диске 12 не совпадает с расположением датчиков 13 и 14 ориентирования по координате, то на выходах последних присутствует низкий уровень напряжения, и на выходах логических элементов 2И 47 и 48 также низкий уровень напряжения, а на выходе элемента ИЛИ-НЕ 63 - высокий уровень, который поступает на второй вход логического элемента ЗИ 56. На третьем входе логического элемента ЗИ 56 присутствует высокий уровень папряжения с выхода логического элемента ЗИ 64, так все исполнительные механизмы 70 находятся в i исходном состоянии. Поэтому на выходе логического элемента 56 ЗИ появляется высокий уровень, который поступает на вход привода 11 установочногЬ вращения коленчатого вала 15. Привод 11 представллет собой, напри-. мер, электродвигатель со схемой управления, высокий уровень на входе которой вызывает вращение электродвигателя, а низкий - остановку. Вращеиие коленчатого вала продолжается о тех пор, пока прорезь на диске 12 не совпадет с торцом датчика 14, редставляющего собой бесконтактный ольцевой выключатель. Противовесы оленчатого вала 15 в этом случае станавливаются под исполнительные еханизмы 7Q таким образом, что оси верления располагаются в. осевой торая представляет собой первый вход блока 1 измерения, и шести триг геров 29-34, вход каждого из которых соединен, с одним из выходов измерите ля 16, а выход предназначен для соединения с одним из разрядов первой шины состояний, которая представляет собой второй выход блока 1 измерения Блок 5 формирования команд выполнем в виде шести триггеров 35-40, D-входы которых предназначены для подключения к соответствзющим разрядам первой шины состояний, которая представляет собой первый вход блока 5 формирования команд, R-входы триггеров 35-40 представляют собой соответственно второй, третий, пятый, шестой, седьмой и восьмой входы блока 5 формирования команд, а выходы триггеров 35-40 предназначены для под ключения к соответствующим разрядам второй шины состояний, которая представляет собой четвертый выход блока 5 фор ирования команд, логического элемента ЗИЛИ 41, первый, второй и третий входы которого подключены соответственно к выходам триггеров 35, 37 и 39, логического элемента ЗИЛИ 42, первый, второй и третий вхо ды которого подключены соответственн к выходам триггеров 36,38 и 40, логи ческого элемента 2И 43, первый вход которого представляет собой четвертый вход блока 5 формирования команд а второй вход соединен с выходом логического элемента ЗИЛИ 41, логического элемента 2ИЛИ-НЕ 44, входы кото рого соединены с выходами одного из логических элементов ЗИЛИ 41 и 42, и выход представляет собой первый выход блока формирования команд, инвертора 45, вход которого соединен с выходом логического элемента 2И 43 и представляет собой третий выход блока 5 формирования команд, и логического элемента ЗИ 46, входы которого соединены соответственно с первым входом логического элемента 2И 43, выходом логического элемента ЗИЛИ 42 и выходом инвертора 45, а выход представляет собой второй выход блока 5 формирования команд. Блок 10 позиционирования выполнен в виде логических элементов 2И 47 и 48, первые входы которых представляют собой соответственно шестой и седьмой входы блока 10 позиционирования, а вторые входы - соответствен7584но второй и третий входы блока 10 позиционирования, логических элемен тов 2И 49-51, первые входы которых соединены между собой, с выходом логического элемента 2И 48 и представляет собой четвертый выход блока 10 позиционирования, логических элементов 2И 52-54, первые входы которых соединены между собой, с выходом логического элемента 2И 47 и представляют собой пятый выход блока 10 позиционирования, логический элемент ШШ 55, входы которого соединены соответственно с первыми входами логических элементов 2И 47 и 48, логического элемента ЗИ 56, первый вход которого соединен с выходом логического элемента-ИЛИ 55, а выход представляет собой третий выход блока 10 позиционирования, логического элемента ИЛИ 57, каладый из входов которого соединен с выходом одного из логических элементов 2И 49 и 52, логического элемента ШШ 58, каждый из входов которого соединен с выходом одного из логических элементов 2И 50 и 53, логического элемента ИЛИ 59, калдцый из входов которого соединен с выходом одного из логических элементов 2И 51 и 54, логического элемента ИПИ-НЕ 60, первый вход и выход которого представляют собой соответственно первый вход и первый выход блока 10 позиционирования, а второй вход соединен с выходом логического элемента ШШ 57 и представляет собой второй выход блока 10 позиционирования, логического элемента ИПИ-НЕ 61, первый вход и выход которого представляют собой соответственно четвертый вход и шестой выход блока 10 позиционирования, а второй вход соединен с выходом логического элемента ИЛИ 58 и представляет собой седьмой выход блока 10 позиционирования, логического элемента ИЛИ-НЕ 62, первый вход и выход которого представляют собой соответственно пятый вход и восьмой выход блока 10 позиционирования, .а второй вход соединен с выходом логического элемента ИЛИ 59 и представляет собой девятый выход блока 10 позиционирования, логичесого элемента 63 ИЛИ-НЕ, каждый из входов которого соединен с выходом одного из логических элементов 2И 47 и 48, а выход - с вторым входом логического элемента ЗИ 56, и логического элемента ЗИ 64 входы которого соединены соответственно с первыми входами логических элементов 60-62, а выход с третьим вхо дом логического элемента ЗИ 56, вторые входы логических элементов 2И 49-54 предназначены для подключения к соответствующим разрядам второй шины состояний, которая представляет собой восьмой вход блока 10 позиционирования, а выходы логических элементов 2И 49-54 предназначены для подключения к соответствующим разрядам третьей шины состояний, которая представляет собой десятый выход блока 10 позиционирования. Блок 2 (3 и 4) отсчета выполнен в виде схемы 65 совпадения, первый вход которой представляет собой-первых вход блока 2(3,4) отсчета, аналогового ключа 66, выход которого соединен с вторым входом схемы 65 совпадения, а первый вход представля ет собой второй вход блока 2 (3,4) отсчета, логического элемента 2И 67 первый вход которого соединен с выходом схемы 65 совпадения, а второй вход - с вторым входом аналогового ключа 66 и представляет собой третий вход блока 2(3,4) отсчета, и логичес ких элементов 2И-НЕ 68 и 69, первые входы которых соединены между собой ,и с выходом логического элемента 2И 67, вторые входы представляют собой соответственно четвертью и пятый входы, а выходы - первый и второй вы ходы блока.2(3,4) отсчета. Узел 7 (8,9) коррекции выполнен в .виде исполнительного механизма 70, привода 71 подачи исполнительного механизма 70, первый и второй входы которого представляют собой соответственно первый и второй входы узла 7(8,9) коррекции, датчик 72 отсчета перемещений, кинематически связанного с исполнительным механизмом 70, выход которого представляет собой пе вый выход узла 7(8,9) коррекции, и датчика 73 исходного положения, выход которого представляет собой второй выход уэла 7(8,9) коррекции. Устройство работает следующим образом. Полный автоматический цикл балансировки включает два основных этапа измерение параметров дисбаланса и коррекцию дисбаланса по результатам измерения. Так как в устройстве рас58fсматривается только пропссс г-Г ;-:--г зации коррекции дисба.паиса трехилоскостных коленчатых ва.поЗр задача б.чо-ка 1 измерения в этом с.лучае сволмтся к-выдаче необходимой для кориекции информации о параметрах д.нсбаланса коленчатого вала, приведенных к трехплоскостной системе,, и пеобхопимых команд для последо.чате.иьнс;1Й обработки отверстий в противовесах коленчатого вала. Измеритель 16 представляет собой измерительное устройство, которое обеспечивает HSMepeinic параметров дисбаланса 3-плоскостного коленчатого вала по двум осевым n..rioc-костям коррекции X и У. Измеритель 16 разделен на три измерительных, канала 17, 18 и 19; каждый из КОТОРЫХ предназначен .п.пя выдачи .инфоркал. о проекциях дисбаланса в соотБетст1гу.ощем противовесе коленчатого вала 15: канал 17 связан с левым противовесом,, канал 18 - со-средним, а каиа.л 19 с правым. Так как в каждом из протнвовесов коленчатого вала 15 имслотся по две оси коррекции ,Х и У, то в состав каждого из каналов Г/,. 3 и 19 входят по два индикатора проекций (входящие в состав пос.11едних ан.ало:;ОХ1ЮКИ 20--22 отделены le запоминающие от каналов 17-19 для наглядпог -и) .. В каждом из запоминающих блоков 2Сэ 21 и 22 объединено по два совершенно -;-мостоятельных ана.логовы.х запом;и:.:1;о-щих-устройства5 каждое из которых предназначено д.пя запомииапиЕ резу.. тата измерения по одной из проекп.ич X и У. Объединение двух з-ппомг-нающых устройств в один блок чисто фуикцкодля одного из противовесов, Г1оэтом в каж,цом из блоков 20-22 есть два выхода, каждый из которых несет информацию о величине проекций дисбаланса по одно.й из координат, В лроцессе измерения помимо аналоговой информации о проекциях дисбаланса с каяздом из канало.Б 17-19 получают дискретную информацию на выходах триггеров 29-34, единичное состояние указывает на необходимость сверлеь.ия по соответствующей координате. Триггеры 29-34 на фиг,1 сгруппированы попарно по принадлежности к противовесам в таком же состоянии, как и каналы 17-19. При этом триггеры 29, 31 и 33 указывают порядок сверления отверстий, распо.поженных в осевой иеН1 поступает на первые входы логи ческих элементов 2И 52, 53 и 54, и на Brjixoflax логических элементов 52 и 53 2И появляется высокий уровень, так как триггеры 36 и 38 находятся единичном состоянии. По аналогии с коррекцией дисбаланса по координата X начинается двюкение вниз исполнительных механизмов 70 в узлах 7 и 8 коррекции, открываются аналоговые ключи 23 и 25, и на первые входы схем 65 совпадения в блоках 2 и 3 о счета поступает аналоговая информация о заданных в результате измерения глубинах сверления по координатам У в левом и средних противовесах коленчатого вала 15. По окончан коррекции по координате У исполнительнье механизмы 70 возвращаются в исходное положение, а триггеры 36 и 38 устанавливаются в нулевое сое- ; тояние. Таким образом, по окончании коррекции дисбаланса все триггеры 3540 находятся в нулевом состоянии и на выходе логического элемента ИЛИ44 появляется высокий уровень напря жения, который поступает на вход блока 6 управления и дает команду о окончании коррекции коленчатого вала 15. Таким образом, предлагаемое устройство обеспечивает полностью авто матизированный цикл коррекции дисба ланса трехплоскостных коленчатых валов, что повышает производительност процесса балансировки. Формула изобретения 1. Устройство для коррекции дисба ланса коленчатого вала, содержащее блок измерения, бпок отсчета, первый вход которого соединен с первым выходоь блока измерения, блок формирования команд, первые три входа которого соединены соответственно с вторым выходом блока измерения, первым и вторым выходами блока отсчета, К/зел коррекции, первый выход котороIo соединен с вторым входом блока отсчета, блок позиционирования, первый выход которого соединен с первьм входом, а первый вход - с вторым выходом узла коррекции, второй выход с вторым входом узла коррекции и тре тьим входом блока отсчета, привод установочного вращения, вход которого соединен с третьим выходом блока позиционирования, диск с прорезью, установленный на выходном валу привода установочного вращения, два датчика ориентации по координате, соединенные соответственно с вторым и третьим входами блока позиционирования, и блок управления, соединенный с первым выходом и четвертым входом блока формирования команд, о т л ичаю.ще е ся тем, что, с целью повышения производительности путем автоматизации цикла коррекции, оно снабжено вторым и третьим блоками отсчетл, первые входы которых соединены соответственно с третьим и четвертым выходами блока измерения, четвертые входы всех блоков отсчета соединены между собой и с четвертыми выходами блока позиционирования, пятые входы всех блоков отсчета - между собой и с пятьм выходом блока позиционирования, первый и второй выходы второго блока отсчета - соответственно с пятым и шестым входами блока формирования команд, а первый и второй выходы третьего блока отсчета - соответственно с седьмым и восьмым входами блока формирования команд, вторьв- узлом коррекции, первый и второй входы которого соединены соответственно с шестым выходом блока позиционирований и с соединенными между собой седьмым выходом блока позиционирования и третьим входом второго блока отсчета, а первый и второй выходы - соответственно с вторЫхМ входом второго блока отсчета и четвертым входом блока позиционирования, и третьим узлом коррекции, первый и второй входы которого соединены соответственно с восьмым выходом блока позиционирования и с соединенными между собой девятым выходом блока позиционирования и третьим входом третьего блока отсчета, а первый и второй выходы - соответственно с пятым входом блока позиционирования и вторым входом третьего блока отсчета, десятый выход блока позиционироания соединен с первым входом блока змерения, а. шестой, седьмой и восьой входы - соответственно с вторым, ретьим и четвертым выходами блока ормирования команд. 2. Устройство по П.1, отлиающееся тем, что, блок форирования команд выполнен в виде шеети триггеров, D-входы которых предназначены для подключения к соответствующим разрядам первой шины состояний, являющейся первым входом блока формирования команд, R-входы триг еров представляют собой соответственно второй, третий, пятый, шестой, седьмой и восьмой входы блока формирования команд, а выходы триггеров предназначены для подключения к соответствующим разрйдам второй шины состояний, являющейся четвертьм выходом блока формирования команд, первого логического элемента ЗИЛИ, входы которого соединены соответственно с выходами первого, третьего и пятого триггеров, второго логического элемента ЗИЛИ, входы которого соединены соответственно с выходами второго четвертого и шестого триггеров, логического элемента 2И, первый вход которого является четвертым входом блока формирования команд, а второй соединен с выходом первого логического элемента ЗИЛИ, логический элемент 2ИЛИ-НЕ, входы которого соединены с выходами первого и второго логических элементов ЗИЛИ, а выход представляет собой первый выход блока формирования команд,, инвертора, вход которого, соединенный с выходом логического элемента 2И, представляет собой третий выход блока формирования команд, и логического элемента ЗИ, входы которого соединены соответственно с первым входом логического элемента 2И, с выходом второго логического элемента ЗИЛИ и с выходом инвертора, а выход представляет собой второй выход блока формирования команд.
3. Устройство по п.1, о т л и ч аю щ е е с я тем, что блок позиционирования выполнен в виде второго и третьего логических элементов 2И, первые входы которых представляют 00бой соответственно шестой и седьмой входы блока позиционирования, а вторые - соответственно второй и третий входы последнего, четвертого, и шестого логических элементов 2И, первые входы которых, соединенные между собой и с выходом третьего логического элемента 2И, представляют собой четвертый выход блока позиционирования, седьмого, восьмого и девятого логических элементов 2И, первые входы которых, соединенные между собой и с выходом второго логического элемента 2И, представляют собой пятый выход блока позиционирования, логического элемента ИЛИ, входы которого соединены с первыми входами второго и третьего логических элементов 2И, второго логического элемента ЗИ, первый вход которого соединен с выходом логического элемента ИЛИ, а выход представляет собой третий выход блока позиционирования, .второго логического элемента ИЛИ, входы которого соединены соответственно с выходами четвертого и седьмого логических элементов 2И, третьего логических элемента ИЛИ, входы которого соединены соответственно с выходами пятого и восьмого логических элементов 2И, четвертого логического элемента ИЛИ, входы которого соединены соответственно с выходами шестого и девятого логических элементов 2И, первого логического элемента ИЛИ-НЕ, первый вход и выход которого представляет собой соответственно первый вход и первый выход блока позиционирования, а второй ВХОД - второй выход последнего и соединен с выходом второго логического элемента ИЛИ, второго логического элемента ШШ-НЕ, первый вход и выход которого представляет собой соответственно четвертый вход и шестой выход бдюка позиционирования, а второй вкод - седьмой выход последнего и соединен с выходом третьего логического элемента ИЛИ, третьего логического элемента ИЛИ-НЕ, первый вход и выход которого представляет собой соответственно пятый вход и восьмой выход блока позиционирования, второй вход - девятый выход блока позиционирования и соединен с выходом четвертого логического элемента ИЛИ, четвертого логического элемента ИЛИ-НЕ, входы которого соединены соответственно с выходами второго и третьего логических элементов 2И, а выход - с вторым выходом второго логического элемента ЗИ, и третьего логического элемента ЗИ, входы которого соединены соответственно с первыми входами первого; второго и третьего логических элементов ИЛИ-НЕ, а выход - с третьим входом второго логического элемента ЗИ, вторые входы логических элементов 2И с четвертого по девятый предназначены для подключения к соответствующим разрядам второй шины состояний, представляющей собой восьмой вход блока позиционирования, а выходы - к соответствующим разрядам третьей шины состояний, представляющей собой десятый выход последнего, 4. Устройство по п.1, о т л и чающееся тем, что каждый блок отсчета выполнен в виде схемы совпадения, первый вход которой пред ставляет собой первый вход блока отсчета, аналогового ключа, первый вход которого представляет собой вто рой вход блока отсчета, а выход сое/диненс вторым входом схемы совпадения, десятого логического элемента 2Й, входы которого соединены соответственно с выходом схемы совпадения и вторьи входом аналогового ключа, представляющим собой третий вход блока отсчета, и двух логических элементов 2И-НЕ, первые входы которых соединены между собой и с выходом десятого логического элемента 2И, вторые входы представляют собой соответственно четвертый и пятый входы, а выходы - соответственно первый и второй выходы блока отсчета.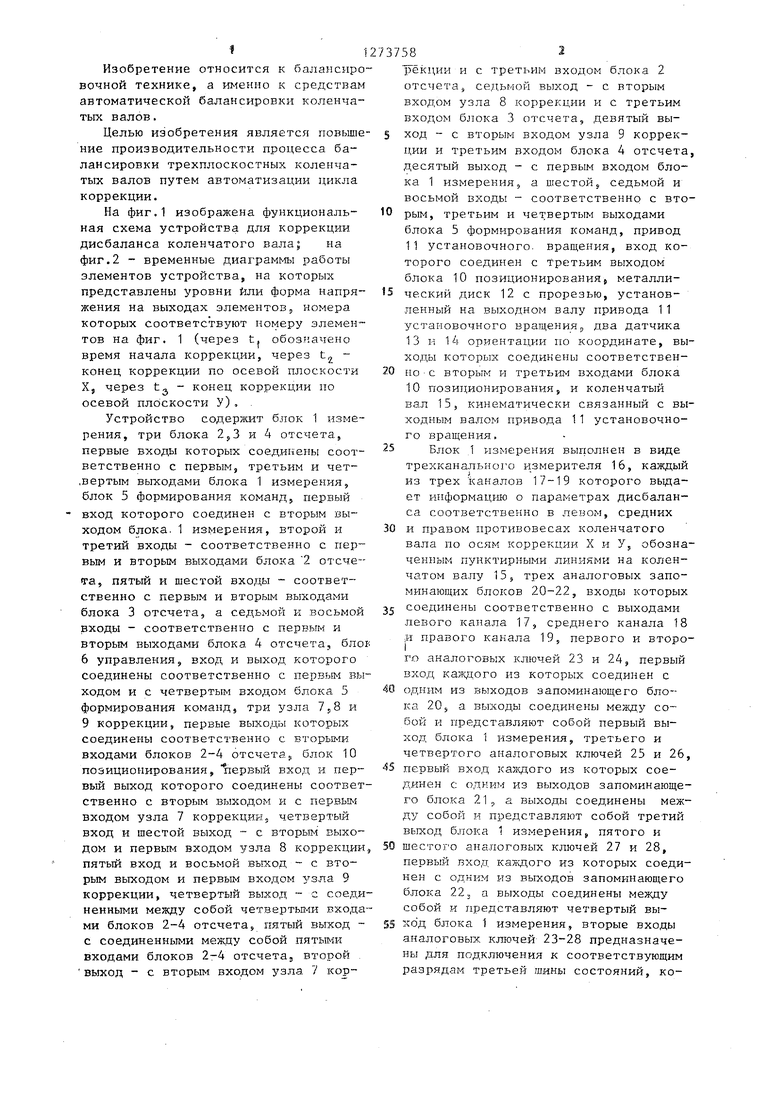
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции дисбаланса коленчатого вала | 1986 |
|
SU1406456A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1982 |
|
SU1035439A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1986 |
|
SU1366893A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1415092A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1221516A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1983 |
|
SU1101701A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1229620A2 |
| Измерительное устройство станка для балансировки коленчатых валов | 1990 |
|
SU1714401A1 |
| Балансировочное устройство | 1982 |
|
SU1054695A1 |

Изобретение относится к балансировочной технике, а именно к средствам автоматической балансировки коленчатых валов. Целью изобретения является повышение производительности процесса балансировки трехплоскостных валов за счет автоматизации цикла коррекции. Блок измерения выдает информацию о параметрах дисбаланса коленчатого вала, блок формирования команд и блок позиционирования определяют последовательность работы узлов коррекции и блоков отсчета при высверливании заданных глубин сверления в противовесах коленчатых валов по координатам X и У, которые с помощью привода установочного вращения и команд от датчиков ориентации (Л по координате устанавливаются в требуемой осевой плоскости. 3 з.п. ф-лы, 2 ил.
| Устройство для коррекции дисбаланса коленчатого вала | 1983 |
|
SU1101701A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1982 |
|
SU1035439A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
