Изобретение относится к средствам автоматизации холоднос1тамповочных работ и может быть использовано для контроля удаления деталей из рабочей зоны пресса, для предотвращения поломки штампа и вынуясденного простоя оборудования. Основная область применения - автоматизация те нологических процессов при штамповке.
Целью изобретения является повышение надежности Контроля при одновременном его упроп ении путем получения более достоверного полезного сигнаша.
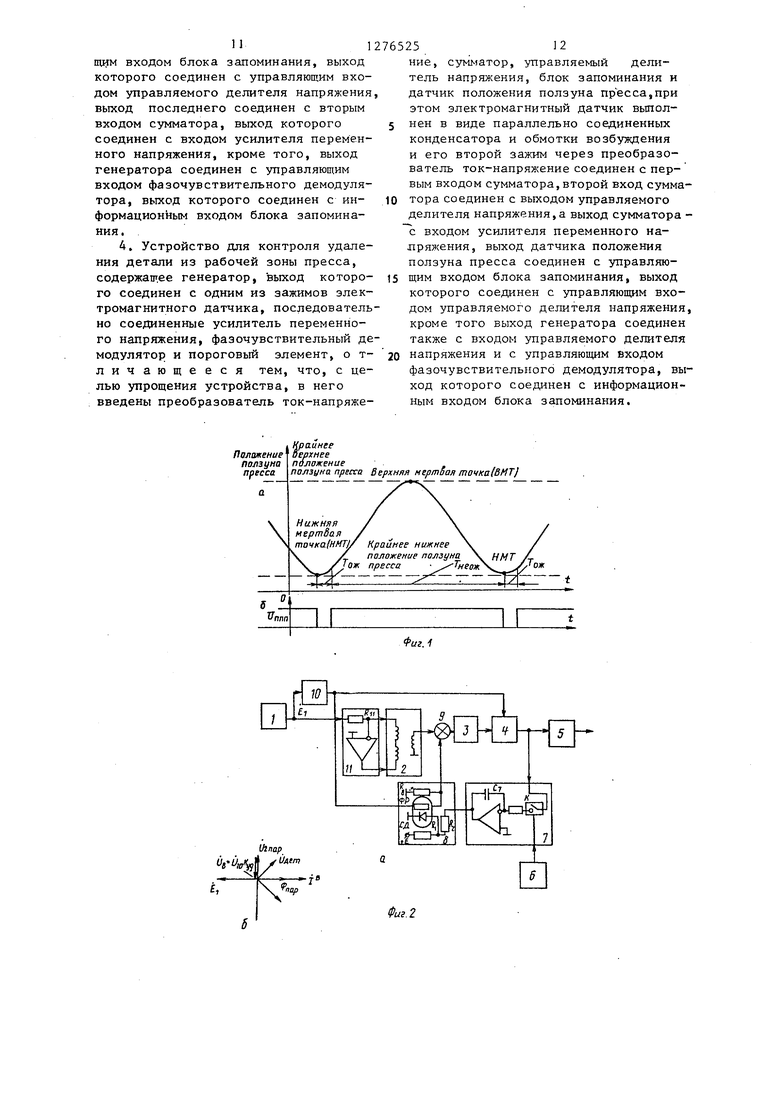
На фиг. 1 изображено изменение положения ползуна пресса в функции времени и интервалы времени
), а также временная
Х (фиг. heostc
диаграмма выходного сигнала и, датчика Положения ползуна пресса
(фиг. 1
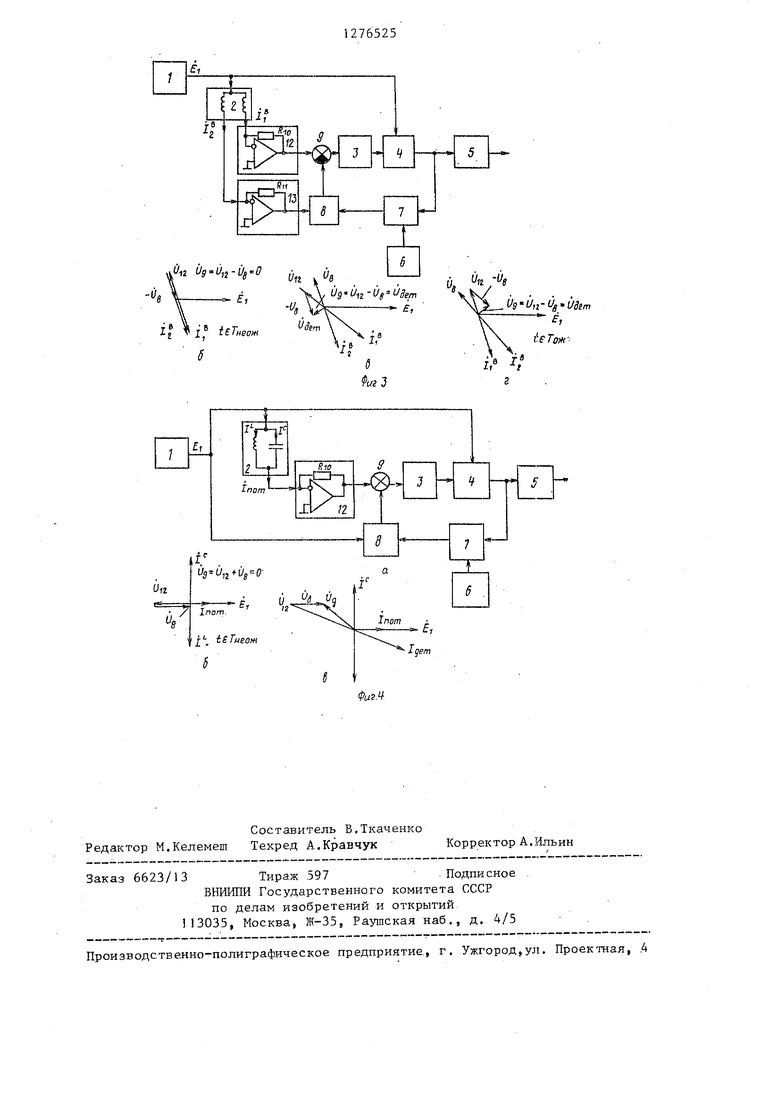
на фиг. 2 - функциональная схема первого варианта устройства для осуществления предложенного способа (фиг. 2 ) и векторнаядиаграмма, поясняющая его работу устрой ства (фиг. 2 ) на фиг, Зц - функциональная схема второго варианта устройства, осуществляющего предложенный способ, на фиг. 35-г - вектор ные диаграммы, поясняющие работу устройства. : интервал времени ,( интервал времени ,H попадании детали в первую обмотку возбуждения, интервал времени Т.и попадании детали во вторую обмотку возбуждения соответственно; на фиг. - функциональная схема третьего варианта устройства, осуществляющего предложенный способ, векторные диасраммы, поясняющ.ие работу устройства для интервала времени для интервала времени Т соответственно.
.
Устройство (первый вариант,фиг,2. содержит генератор- 1 , электромагнит ный датчик 2, последовательно сое.диненные усилитель 3 переменного напряжения, фазочувствительный демодулятор 4 и .пороговыйэлемент 5, датчик 6 положения ползуна пресса, блок
7Запоминания, управляемый делитель
8напряжения, сумматор 9, фазосдвигающий блок 10, преобразователь напряжение-ток 11, вькод которого че.рез электромагнитный датчик 2 соединен с одним из входов сумматора 9, другой вход которого соединен с выходом управляемого делителя 8 напряжения. Вьтход сумматора 9
76525
усилитель 3 переменного напряжения соединен с одним из входов фазочувствительного демодулятора- 4, выход которого соединен с входом блока 7
J запоминания и порогового элемента 5. Выход блока 7 запоминания соединен с управляющим входом управляемого делителя 8 напряжения, второй вход которого соединен с выходом Фазо10 сдвигающего блока 10. Выход генератора 1 соединен с входом преобразователя ток-напряжение 11 и с входом фазосдвигающего блока 10, выход которого соединен с вторым входом фа15 зочувствительного Д ;модулятора 4. Выход датчика 6 положения ползуна пресса соединен с управляющим входом блока 7 запоминания.
Устройство (второй вариант,фиг.З)
20 содержит генератор 1, электромагнитный датчик 2, последовательно, сое-диненные усилитель 3 переменного напряжения, фазочувствительный демоду лятор 4 и пороговый элемент 5, дат25 чик 6 положения ползуна пресса, выход которого соединен с управляющим входом блока 7 запоминания. Выход блока 7 запоминания соединен с управляющим входом управляемого делителя 30 напряжения, выход которого соединен с одним из входов сумматора 9, другой вход которого соединен с выходом одного из преобразователей токнапряжение 12, а выход сумматора через усилитель 3 переменного напряжения соединен с входом демодулятора 4. Выход другого преобразователя токнапряжение 13 соединен с вторым входом управляемого делителя 8 напряжения, а выход генератора 1 соединен с вторым входом фазочувствительного демодулятора 4 и с входом электромагнитного датчика 2, выходы которого соединены с входами первого и второго преобразователей ток-напряжение 12 и 13.
Устройство (третий вариант,фиг.4) содержит генератор 1, выход котороi o соединен с входом электромагнитного датчика 2, последовательно сое5 диненные усилитель 3 переменного напряжения, фазочувстБительный демодулятор 4 и -пороговый элемент 5, датчик 6 положения ползуна пресса, выход которого соединен с управляющим
55 входом блока 7 запоминания. Выход последнего соединен с управляющим входом управляемого делителя 8 напряжения, выход которого соединен с одним из входов сумматора 9, другой вход которого соединен с выходом преобразователя ток-напряжение 12. Выход генератора 1 соединен также с вторым входом управляемого делителя 8 напряжения не вторым входом фазо чувствительного демодулятора 4, выход которого соединен с входом бл ка 7 запоминания. Выход электромагнитного датчика 2 соединен с входом преобразователя ток-напряжение 12. Операция создания магнитного пол в зоне контроля осуществляется при помощи одной или двух параллельно расположенных обмоток возбуждения, питаемых от источника переменного напряжения. Ток, протекая по обмотке (обмоткам возбуждения),.создает между ними магнитное поле (зону кон троля), состояние которого меняется под действием дестабилизирующих факторов или в связи с попаданием в зону контроля детали. Операция образования разностного сигнала, из которого выделяется информация о попадании детали в зону контроля, осуществляется следующимобразом. Информацию о том, ожидается ли попадание детали в зону контроля, несет положение ползуна пресса. Появление детали ожидается с момента времени, когда ползун пресса находится в нижнем положении, и длится в течение времени Т необходимого для пролета детали в струе сжатого воздуха от места штамповки до зоны контроля (при этом ползун движется в верхнее положение, фиг. 1р). Величина сигнала, получаемого на сигнальной обмотке во время перед ожидаемьш попаданием детали в зону контроля (фиг. IQ ), запоминается, например, при помощи управляемого д лителя напряжения и вычитается, например, при помоши сумматора из сиг нала, получаемого на сигнальной обмотке во время Tj. В результате величина разностного сигнала (напряже ние на выходе сумматора), из которого выделяется информация о попадании детали в зону контроля, равна нулю. При попадании детали в зону контроля в интервале времени Т изменяется суммарный ток, пронизывающий витки сигнальной обмотки, что приводит к появлению разностного сигнала, который несет информацию о попадании детали в зону контроля, при этом паразитный сигнал не влияет на величину полезного сигнала. Операция вьщеления из разностного сигнала информации о попадании детали в зону контроля осуществляется путем преобразования величины разностного сигнала переменного напряжения в постоянное, осуществляемого, например, при помощи фазочувствительного демодулятора, и сравнения уровня этого напряжения с пороговым значением, осуществляемого при помощи порогового элемента. .По результату сравнения судят о том, удалилась ли деталь из рабочей зоны пресса. При контроле удаления деталей из рабочей зоны пресса согласно изобретению резко ослабляются требования к точности изготовления электромагнитного - датчика, так как паразитный сигнал, обусловленный неточностью его изготовления, в периоды времени .е изменяется и разность между запомненным значением паразитного сигнала его . значением перед попаданием детали в зону контроля Upa,p равна нулю, при этом существенно ослаблено влияние дестабилизирующих факторов вследствие того, что изменение паразитного сигнала, обусловленное этими факторами, носит характер медленного V дрейфа -и за время ближайших интервалов Т практически не изменяется, т.е. справедливо равенство неолс о„с к , кроме того, существенно повьшена помехоустойчивость в результате того, что выделение полезной составляющей сигнала происходит из разностного сигнала, причем оседание детали в зоне контроля также не нарушает работы устройства, так как дополнительный паразитный сигнал, величина которого запоминается в интервале вычитается из паразитного сигнала в интервале Т не оказывает влияния на величину разностного сигнала, из которого вьщеляется полезная информация. Таким образом, в предложенном способе повышена надежность .и чувствительность контроля. Устройство, реализующее предложенный способ (фиг. 2 ), работает следующим образом. Выходное напряжение Е генератора 1 при помощи преобразователя напряжение-ток 11 преобразуется в ток, питающий обмотки возбуждения электромагнитного датчика 2, причем соглас но фиг.2 ,/R. где R - сопротивление во входной цепи операционного усилителя, на основе которого выполнен преобразователь напряжение-ток 11. Обмотки возбуждения включены в цепь отрицательной обратной связи. Фазосдвигающий блок 10 сдвигает фазу напряжения Е на 90 (на фиг. 2S, и его напряжение и подается на вход управляемого делителя 8 напряжения. Вследствие разброса параметров датчика 2 и действия дестабилизирующих факторов сигнальную обмотку всегда пронизываетпаразитный поток , отличный от нуля, в результате чего на ней наводится напряжение и,(фиг. 2 ). Это напряжение подается на вход сумматора 9, на другой вход которого подается напряжение U g с выхода управляемого делителя 8 напряжения. UB OУправляемый делитель 8 напряжения работает следующим образом. При изменении напряжения на его управляющем входе изменяется TOK,f протекаюп1Ий через светодиод СД оптрона, и в результате изменения светового потока светодиода СД изменяётся величина фоторезистора ФР, кото рый совместно, с резистором RQ образу ЮТ делитель напряжения, т.е. изменяется козффициент деления делителя напряже1шя. Резисторы R и Н необкодимы для задания рабочего тока через светодиод СД. Блок 7запоминания работает в Двух режимах в зависимости от того, замк нут ключ 4 или разомкнут. Когда ключ К замкнут, блок 7 запоминания рабо тает как интегратор постоянного на.пояжения. Когда ключ К размыкается, ОН переходит в режим запоминания. На конденсаторе Сд хранится напряжение, которое было в момент непосредственно перед размыканием ключа К. Ключ К размыкается и замыкается сигналом, переходящим с датчика 6 положения ползуна пресса, причем в период Т ключ К замкнут, а в пе. ИсОИС риод 1оук размкнут. В интервале времени Т (ключ К )величина напряжения на выходе блока 7 запоминания устанавливается такой, что выполняется равенство-и К 2nqp ю аЭ- апаргде Ug - выходное напряжение сумматора 9. Это происходит в результате того, что блок 7 запоминания,управляемый делитель 8 напряжения, и сумматор 9 образуют цепь отрицательной обратной связи (ООС), в результате действия которой выполняется равенство (l). Например, под действием дестабилизирующих факторов увеличилось напряжение на выходе сигнальной обмотки, при этом на выходе фазочувствительного демодулятора 4 напряжение станет отрицательным, а.на выходе блока 7 запоминания - более положительным,в результате чего уменьиится и козффициент деления управляемого делителя 8, а напряжение Ug увеличится. На выходе сумматора 9 снова установится нулевой уровень. Таким образом, в течение, всего периода времени T g выполняется равенство (l). Во время Тд. (ключ К разомкнут) блок 7 запоминания переходит в режим хранения величины напряжения Ug. Вследствие того, что и,рЗа период Тд,практически не изменяется, на выходе сумматора 9 разностный сигнал по-прежнему остается нулевым (в отсутствии детали). При попадании детали в зону контроля изменяется суммарный магнитный поток, пронизывающий сигнальную обмотку, в результате чего на выходе сумматора 9 появляется напряжение и5ет(фиг. 2§). Это напряжение,пройдя через усилитель 3 переменного напряжения и фазочувствительный демодулятор 4,попадает на вход порогового элемента 5, приводя к его срабатыванию. После окончания времени Т,ключ К замыкается и на выходе сумматора 9 Снова поддерживается нулевой уровень, независимо от того, осела деталь в электромагнитном датчике 2 или вылетела из него. Паразитное напряжение и всегда больше, чем его изменения, вызванные действием дестабилизирующих факторов. Это позволяет добиться того. чтобы напряжение Цд(и ) и ли в противофазе (если они в фазе, то необходимо использовать сигнал с другого конца сигнальной обмотки) Предложенное устройство обладает значительной надежностью и повьшённо чувствительностью при контроле, однако его датчик сложен. Кроме того, для исключения влияния сигнальной обмотки на распределение магнитных силовых линий в зоне контроля по не не должен протекать ток (она должна работать на холостом ходу), т.е. входное сопротивление сумматора 9 должно быть высоким. Как известно, при такой нагрузке уменьшается поме хозащищенность устройства. Это вынуждает либо размещать электрическую часть устройства в непосредстве , ной близости от электромагнитного датчика, либо защищать вход суммато ра от помех конструктивными мерами. Функциональная схема второго варианта устройства для осуществления предложенного способа контроля (фиг. 3 ) работает следующим образом. Электромагнитный датчик 2 состои из двух идентичных обмоток возбуждения, расположенных параллельно од на другой. Зона контроля находится внутри этих обмоток. В качестве сиг нала, несущегоинформацию о состоянии магнитного поля контроля используется ток питания обмоток возбуждения. Токи возбуждения обмоток электромагнитного датчика 2 син фазны (фиг. 3S) и одинаковы по вели чине. Эти токи несут информацию о состоянии магнитного поля в зоне контроля. При помощи преобразователей ток-напряжение 12 и 13 они преобразуются в соответствующие напряжения. Ч.-1,.. Н./13 где К .К - коэффициенты преобразов ния соответствующих пре образователей. При использовании преобразователей на основе операционных усилителей К R , К, интервале времени 7 запоминания сигналом 4inn ( ) переводится в режим интегрирования, т.е. замыкается цеп ООС, осуществляемая блоком 7 запоми нания, управляемым делителем 8 напряжения и сумматором 9. В результа те вьшолняется равенство и.ш-и. и -к,и 0. а 2 S 11 s3 13 Изменением величины коэффициента деления управляемого делителя 8 напряжения необходимо добиться, чтобы К К . 11 При переходе блока 7 запоминания в режим хранения в период Т.« запоминается величина напряжения LJg , в результате чего на выходе сумматора 9 продолжает поддерживаться нулевой уровень напряжения. При появлении детали в первой обмотке ток, проходящий через нее, изменяется как по величине, так ипо направлению (фиг. 3g),B результате чего напряжение Ug, отличное от нуля, поступает на вход порогового элемента 5. При появлении детали во второй обмотке (фиг. Зг),ток, пррТекающий по ней, также изменяется, в результате чего напряжение Ua противоположной фазы (противоположной полярности) проходит на вход порогового элемента 5. Настраивая пороговый элемент 5 на срабатывание от положительного или отрицательного уровня сигнала или применяя двухпороговый элемент, можно судить о том, попала деталь-в зону .контроля или не попала. Данный вариант реализации предложенного способа контроля обладает высокой помехозащищенностью, поскольку сигнал от датчика к электронной части устройства передается в виде тока. Кроме того, датчик становится проще, так как имеет лишь две обмот иОднако и в данном устройстве датчик сравнительно сложен. Функциональная схема третьего варианта устройства для осуществления предложенного способа контроля с датчиком в виде одной катущки шндуктивности представлена на фиг. 4а. Зона контроля расположена внутри катушки индуктивности. В данном устройстве параллельно катушке индуктивности ; включен конденсатор. Собственная, частота образованного контура равна частоте колебаний, вырабатываемых генаратором 1. В резульгате чего датчик 2 протекает ток IfiTi совпадающий по фазе с питагапк м напряжением, составляющие которого 1 и l противофазны и равны. Ток 1 при помощи преобразователя токнапряжение 12 преобразуется в напря жение. и -т К , t2 mrr 12 где К - коэффициет преобразования преобразователя -12 (при использован операционного усилителя К R ).Это напряжение подается на вход суммато ра 9, при помощи которого образуется разностный сигнал и Чгад- - в интервале времени Т, цепью ОО образованной блоком 7 запоминания, управляемым делителем 8 напряжения су мматором 9, поддерживается 1путем изменения К ) равенство (фиг,4 и К Е 12 уЭ 1 интервале времени Т сигналом (фиг. 1 ) блок 7 запоминания пе реводится в режим хранения напряжения и . При появлении детали в зоне контроля появляется постоянное напряжение на входе порогового элемен та 5, вследствие чего он срабатывает,. Выбор оптимального устройства из предложенных определяется конкретны ми условиями работы. В частности, важную роль играют электрические и магнитные параметры штампуемых дета лей. Например,.последний вариант ус ройства хорошо контролирует детали с малой магнитной проницаемостью и малым электрическим сопротивлением (немагнитные металлы). Первое из рассмотренных.устройств хорошо контролирует детали с большим электрическим сопротивлением и большой маг нитной проницаемостью, второе из рассмотренных устройств уверено кон тролирует и те и другие детали. Формула изобретени 1, Способ контроля удаления дета ли из рабочей зоны пресса, заключающийся в выделении информации о наличии детали в зоне контроля после прохождения рабочей зоны из разност ного сигнала, отличающийС-я тем,- что, с целью повьшюния надежности контроля, формирование разностного сигнала производят при попадании детали в зону контроля пу тём запоминания сигнала, несущего информацию о состоянии зоны контроля, перед попаданием в нее детали и рабочей зоны пресса, измерения сигнала при появлении детали в зоне контроля и последующего взаимного вычитания этих сигналов. 2.Устройство для контроля удаления детали из рабочей зоны пресса содержащее генератор, электромагнит-ный датчик, последовательно соединенные усилитель переменного напряжения, фазочувствительный демодулятор и пороговый элемент, отличающееся тем, что, с целью повышения достоверности контроля, в него введены преобразователь напряжение-ток, сумматор, управляемый делитель напряжения,, блок запоминания и датчик положения ползуна пресса, при этом выход последнего соединен с управляющим входом управляемого делителя напряжения, а информационный вход - с выхо-с дом фазочувствительного демодулятора, выход управляемого делителя напряжения соединен с одним из входов сумматора, другой вход которого соединен с выходом сигнальной обмотки электромагнитного датчика, выход сумматора соединен с входом усилителя переменного напряжения, а выход генератора через преобразователь напряжение-ток соединен с обмотками возбуждения электромагнитного датчика, кроме того выход фазосдвигшощего блока соединен с входом управляемого делителя напряжения. 3.Устройство для контроля удаления детали из рабочей зоны пресса, содержащее генератор, электромагнитный датчик, последовательно соединенные усилитель переменного напряжения, фазочувствительный демодулятор и пороговый элемент, о т л и ч а ющ е е с я тем, что, с целью расширения функциональных возможностей при контроле, в него введены два преобразователя ток-напряжение, сумматор, управляемый делитель напряжения, блок запоминания и датчик положения ползуна пресса, при этом электромагнитный датчик выполнен в виде двух обмоток возбуждения, соединенных одними выводами, образуюшлми общий зажим электромагнитного датчика, вторые выводы обмоток возбуждения через соответствующие, преобразователи ток-напряжение соединены соответственно с первым входом сумматора и с входом управляемого делителя напряжения, выход датчика положения ползуна пресса-соединен с управляющим входом блока запоминания, выход которого соединен с управляющим входом управляемого делителя напряжения выход последнего соединен с вторым входом сумматора, выход которого соединен с входом усилителя переменного напряжения, кроме того, выход генератора соединен с управляющим входом фазочувствительного демодулятора, выход которого соединен с информационным входом блока запоминания.
А. Устройство для контроля удаления детали из рабочей зоны пресса, содержащее генератор, выход которого соединен с одним из зажимов электромагнитного датчика, последовательно соединенные усилитель переменного напряжения, фазочувствительный демодулятор и пороговый элемент, о тличающееся тем, что, с целью упрощения устройства, в него введены преобразователь ток-напряжеКрайнее
Верхнее
положение
ползуна пресса Верхняя нертбоя тачка(дНТ)
ние, , управляемый делитель напряжения, блок запоминания н датчик положения ползуна прёсса,при этом электромагнитный датчик выполнен в виде параллельно соединенных конденсатора и обмотки возбуждения и его второй зажим через преобразователь ток-напряжение соединен с первым входом сумматора, второй вход сумматора соединен с выходом управляемого делителя напряжения,а выход сумматора с входом усилителя переменного налряжения, выход датчика положения ползуна пресса соединен с управляющим входом блока запоминания, выход которого соединен с управляющим входом управляемого делителя напряжения, кроме того выход генератора соединен также с входом управляемого делителя
напряжения и с управляющим входом фазочувствительного демодулятора, выход которого соединен с информационным входом блока запоминания.




| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля удаления детали из рабочей зоны пресса и устройство для его осуществления | 1987 |
|
SU1479331A1 |
| Электромагнитный расходомер | 1991 |
|
SU1830135A3 |
| Устройство для определения угла наклона объекта | 1980 |
|
SU896414A1 |
| Электропривод с частотно-токовым управлением | 1983 |
|
SU1111243A1 |
| Устройство для управления вентильным преобразователем | 1985 |
|
SU1277319A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ИЗЛОМОВ И ДЕФЕКТОВ В РЕЛЬСАХ | 2024 |
|
RU2834398C1 |
| Устройство для автоматической компенсации емкостных токов в электрической сети | 1983 |
|
SU1113867A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308802C1 |
| Устройство для автоматического регулирования температуры заготовки при непрерывно-последовательном индукционном нагреве | 1981 |
|
SU1023672A1 |
Изобретение относится к области автоматизации технологических процессов при штамповке и позволяет осуществить достоверный контроль удаления, детали из рабочей зоны пресса, который обеспечивается предложенным способом контроля, заключающимся в последовательном сравнении сигналов, несущих информацию о состоянии магнитного поля до момента появления детали в зоне контроля и после него, и выделении разностного сигнала. Предложено три варианта устройства для реализации данного способа контроля, содержащих электрически соединенные генератор переменного тока, электромагнитный датчик, сумматор, фазочувствительный демодулятор, пороговый элемент, датчик положения ползуна пресса,управляемый делитель напряжения и блок запоминания. В зависимости от технологических требований, предъявляемых S к устройству для реализации предложенного, способа контроля, предлага(О ется электромагнитный датчик выполнять по одному из трех вариантов, в зависимости от чего конкретная функциональная схема устройства может включать дополнительно преобразоваL тели напряжения и тока или фазосдви(С ганщий блок. 4 с,п. ф-лы, 4 ил. ot СП
Крайнее нижнее
положение ползуна N. ЦМТ пресса Тнеож
Us-U,rlJg-IJ3em - f
If Tiwf
дет
| Электромагнитный датчик для контроля положения стальных изделий | 1977 |
|
SU735348A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
